So richten Sie die Antennenhöhe für PPK ein
In dieser Anleitung wird erklärt, wie Sie die Antennenhöhe an Ihrer Basis und Ihrem Rover einstellen, um genaue Höhenangaben in PPK zu gewährleisten.
Übersicht
Reach-Empfänger berechnen die Positionen im Antennenphasenzentrum (APC). Das APC ist der effektive Punkt, an dem GNSS-Signale empfangen werden. Für Vermessungsaufgaben benötigen Sie jedoch in der Regel die Koordinaten des Punktes auf dem Boden. Um genaue bodennahe Koordinaten zu erhalten, müssen Sie die Antennenhöhe in Emlid Flow eingeben.
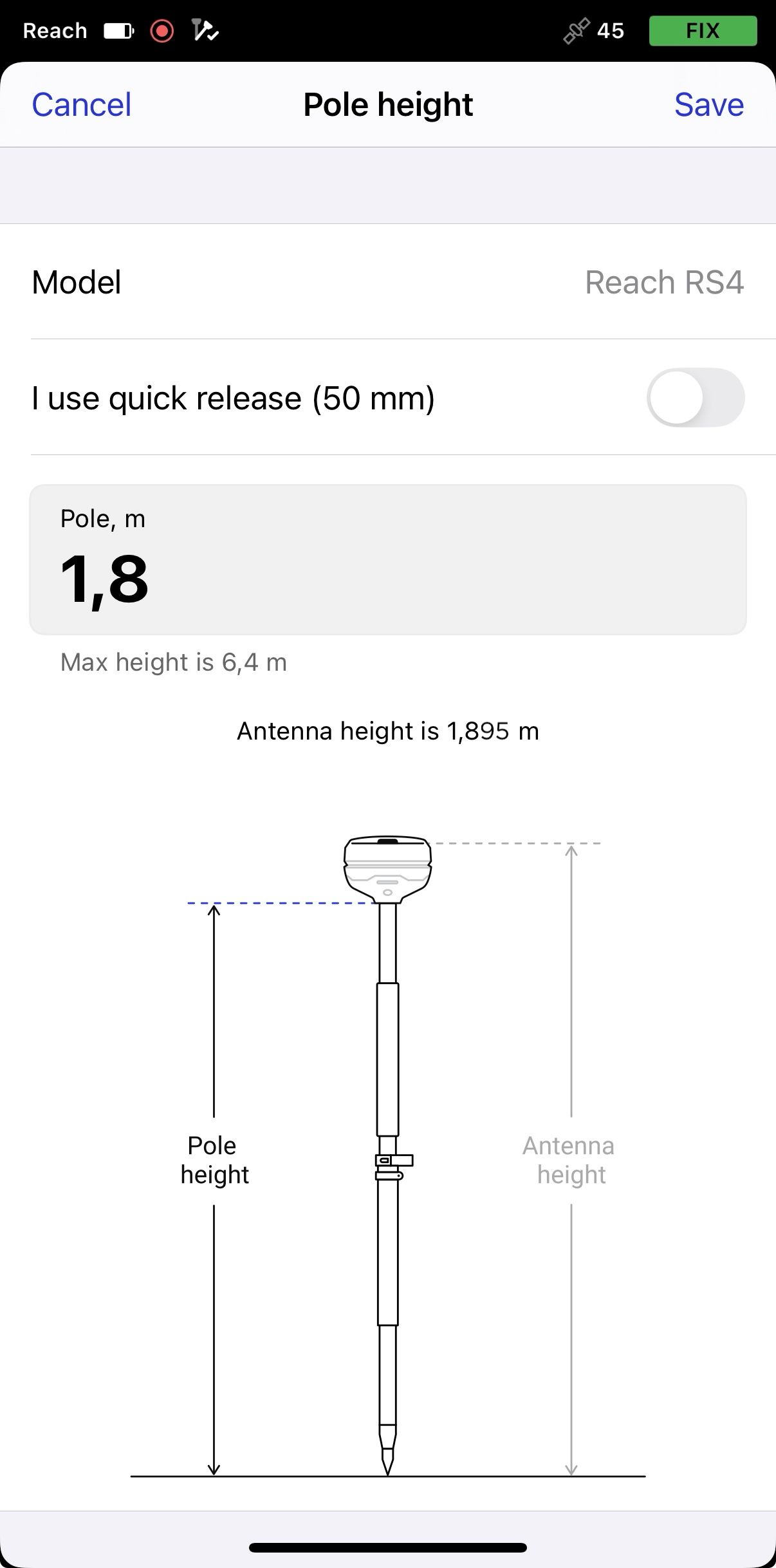
Bei GNSS-Empfängern ist die Antennenhöhe der Abstand von der Markierung am Boden bis zum Antennenphasenzentrum (APC). Diese Höhe besteht aus zwei Elementen:
- der Entfernung zwischen der Markierung auf dem Boden und dem Mittelpunkt auf der Unterseite des Reach, dem Antennenreferenzpunkt (ARP),
- dem Antennenversatz zwischen ARP und APC.
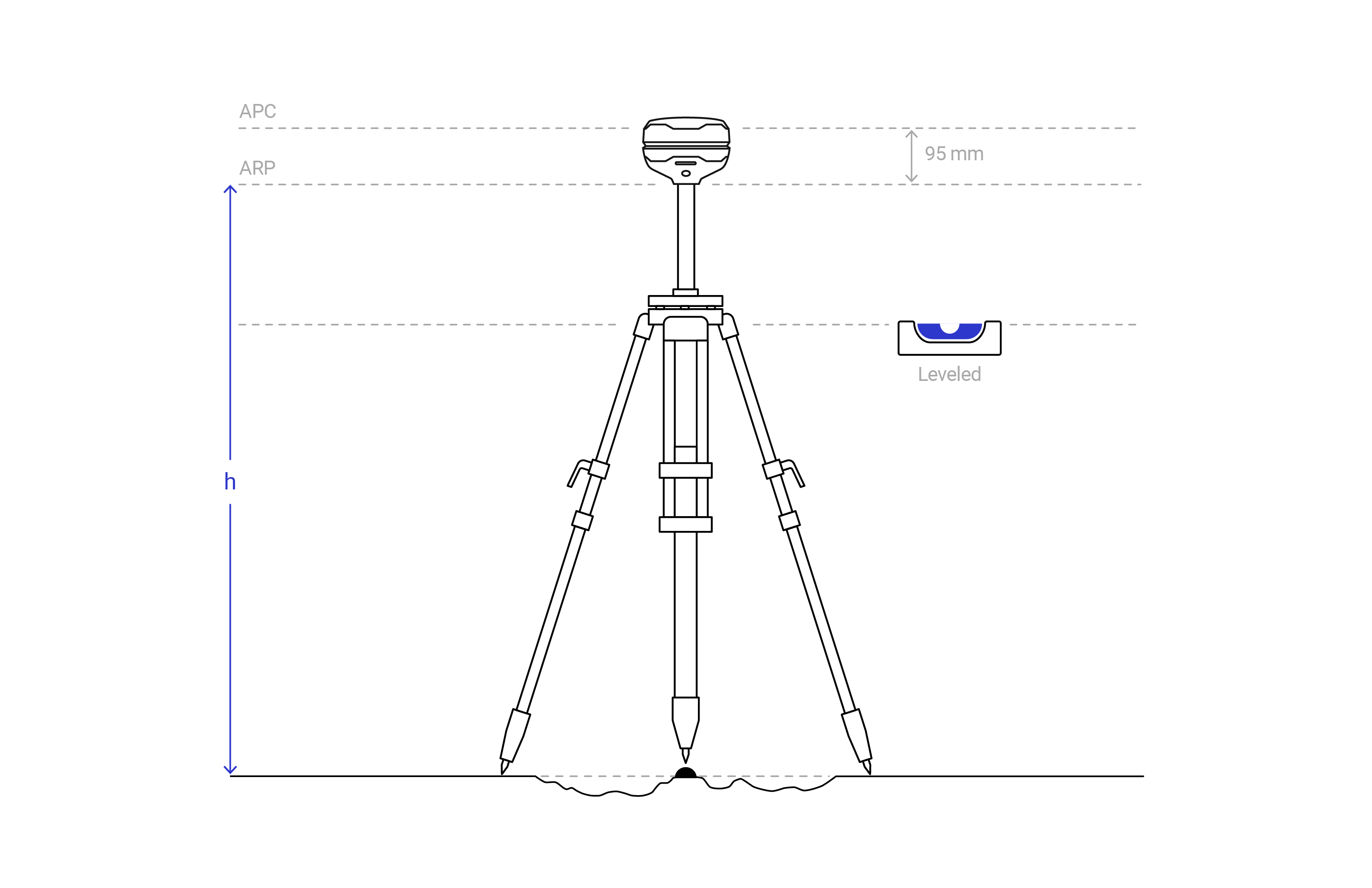
In Emlid Flow brauchen Sie nur die Höhe bis zum ARP einzugeben, d. h. die Höhe bis zum Boden des Empfängers. Die App fügt automatisch den Antennenversatz hinzu, der von Ihrem Reach-Modell abhängt. Wenn Sie die Antennenhöhe in einem Bereich der App einstellen, wird sie auch in allen anderen Bereichen aktualisiert. Dadurch bleiben die Werte im gesamten Arbeitsablauf konsistent.
Um die Antennenhöhe automatisch über mehrere Abschnitte hinweg zu synchronisieren, stellen Sie sicher, dass Ihr Empfänger die Firmware-Version 32 oder höher verwendet. In früheren Versionen müssen Sie die Höhe in jedem Abschnitt manuell aktualisieren.
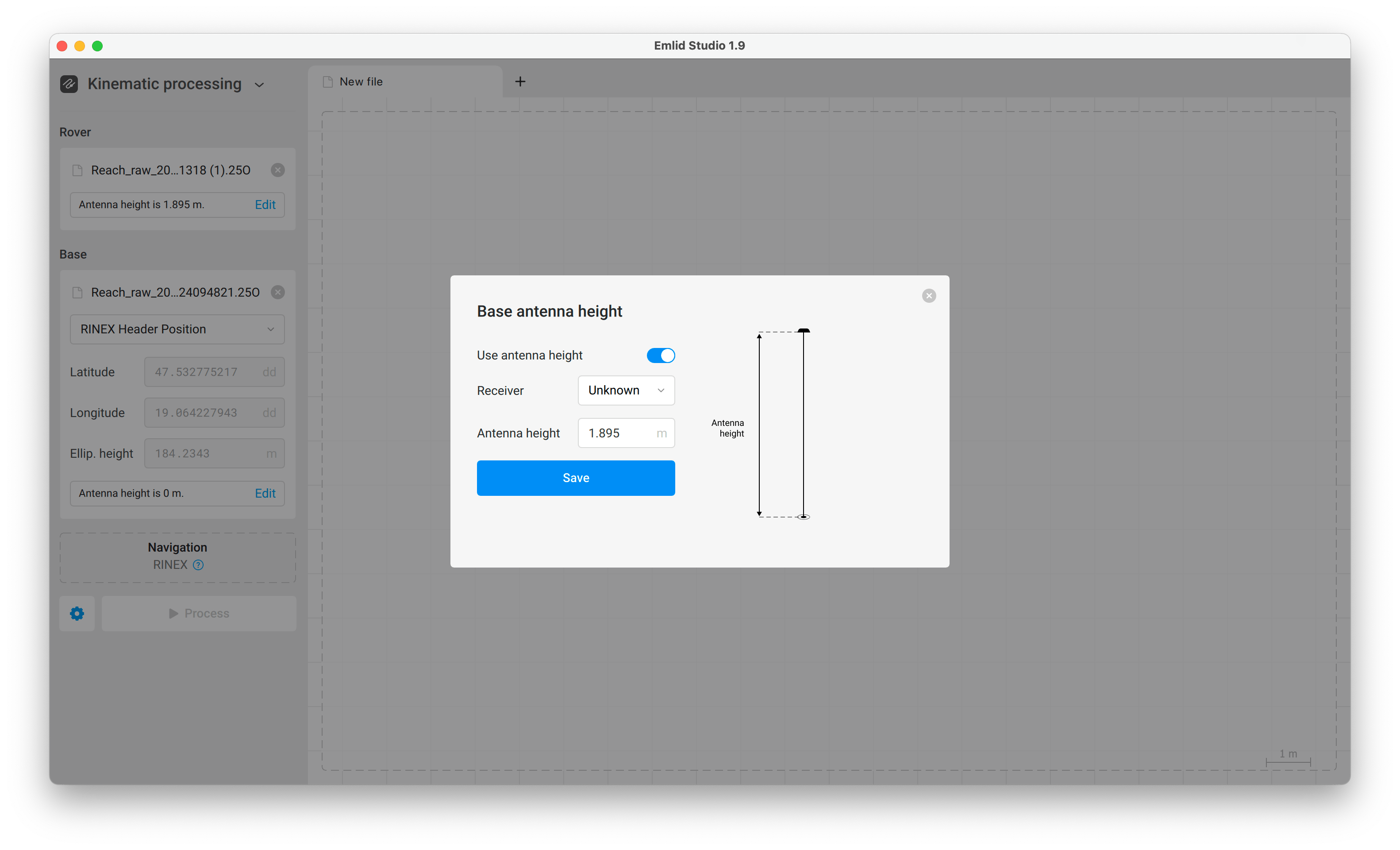
Für PPK zeichnet Ihr Reach-Gerät Logs im RINEX-Format auf, das die Antennenhöhe im Header der Beobachtungsdatei enthält.In Emlid Studio, für Reach RS4/RS4 Pro, müssen Sie diese Daten derzeit jedoch manuell eingeben. Dort müssen Sie bei der Einstellung der Antennenhöhe im Feld Receiver (Empfänger) den unbekannten Typ wählen und im Feld Antenna height (Antennenhöhe) den Phasenversatz der Antenne von 95 mm plus die Stabhöhe hinzufügen.
Die folgende Schritt-für-Schritt-Anleitung bezieht sich sowohl auf die Basis als auch auf den Rover. Für diesen Arbeitsablauf verwenden wir Kinematic processing (Kinematische Bearbeitung), es funktioniert jedoch auch für die Option Stop & Go (Stop-and-go) sowie PPK-Geotagging und Geotagging zur RTK-Sicherung.
Stop & Go mit Emlid Flow ermöglicht es Ihnen, die Positionen der gesammelten Punkte ohne eine Echtzeit-Korrekturverbindung zwischen der Basis und dem Rover zu verbessern. Dies kann aufgrund einer unzureichenden Sichtverbindung, einer fehlenden Internetverbindung, der Nichtverfügbarkeit des Ntrip-Dienstes usw. geschehen. Diese Methode dient auch als zuverlässiges RTK-Backup und unterstützt PPK-Geotagging für die GCP-Erfassung. Um Ihre Daten in Emlid Studio zu verarbeiten, benötigen Sie die RINEX-Logs von Basis und Rover, eine Navigationsdatei und eine aus Emlid Flow exportierte CSV-Datei.
Arbeitsablauf
-
Öffnen Sie die App Emlid Flow und verbinden Sie sich mit Ihrem Empfänger.
-
Tippen Sie im Tab Receivers (Empfänger) auf Logging (Loggen).
-
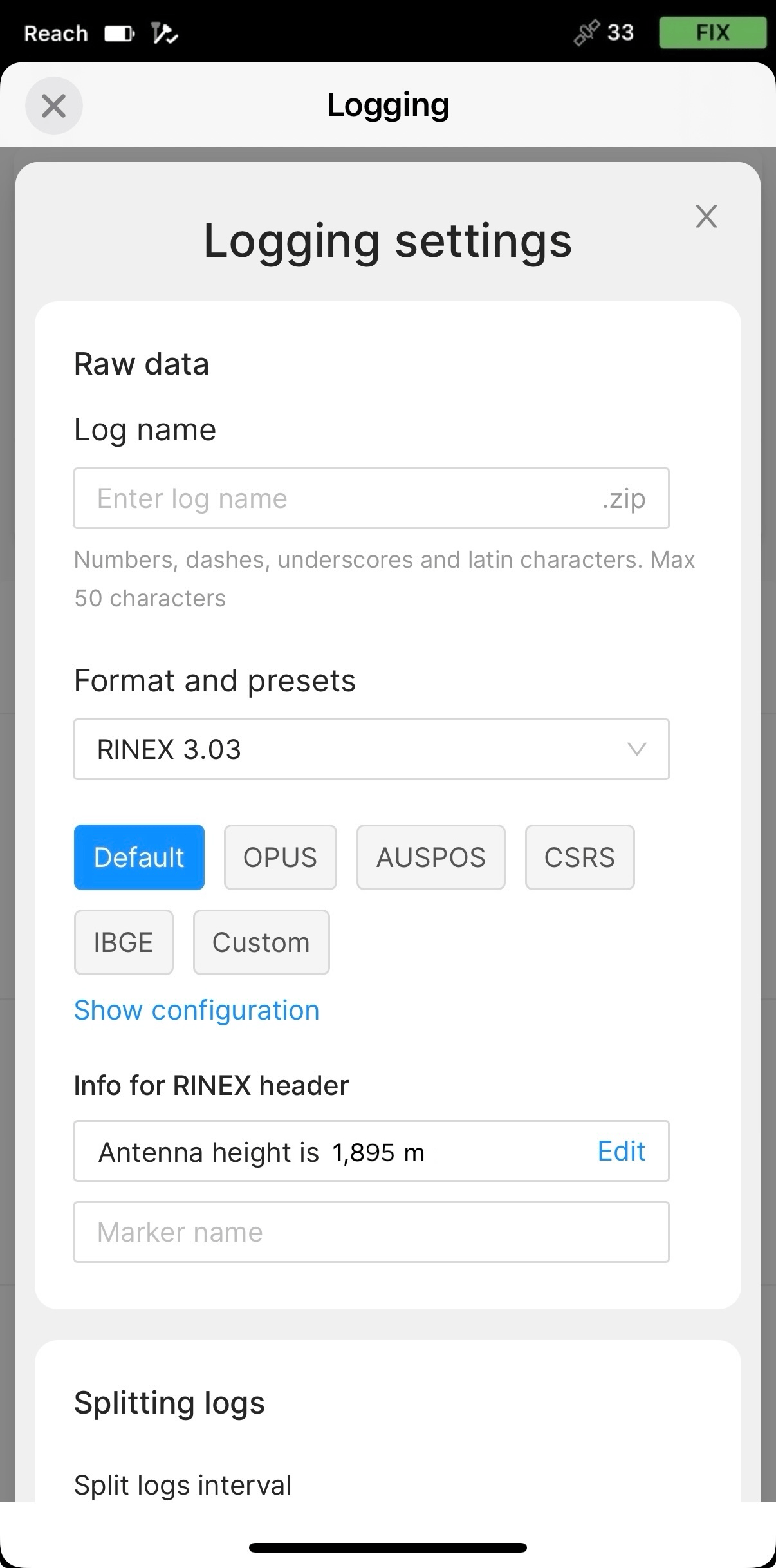
Gehen Sie zum Tab Recorded Logs and Settings (Aufgezeichnete Logs und Einstellungen) und tippen Sie auf die blaue Zahnrad-Schaltfläche.

-
Tippen Sie unter Info for RINEX header (Info für RINEX-Header) auf Edit (Bearbeiten) und stellen Sie die gemessene Höhe Ihres Stativs oder Vermessungsstabs ein.
-
Tippen Sie auf Save (Speichern), dann auf Apply (Anwenden) und starten Sie Logging (Loggen).
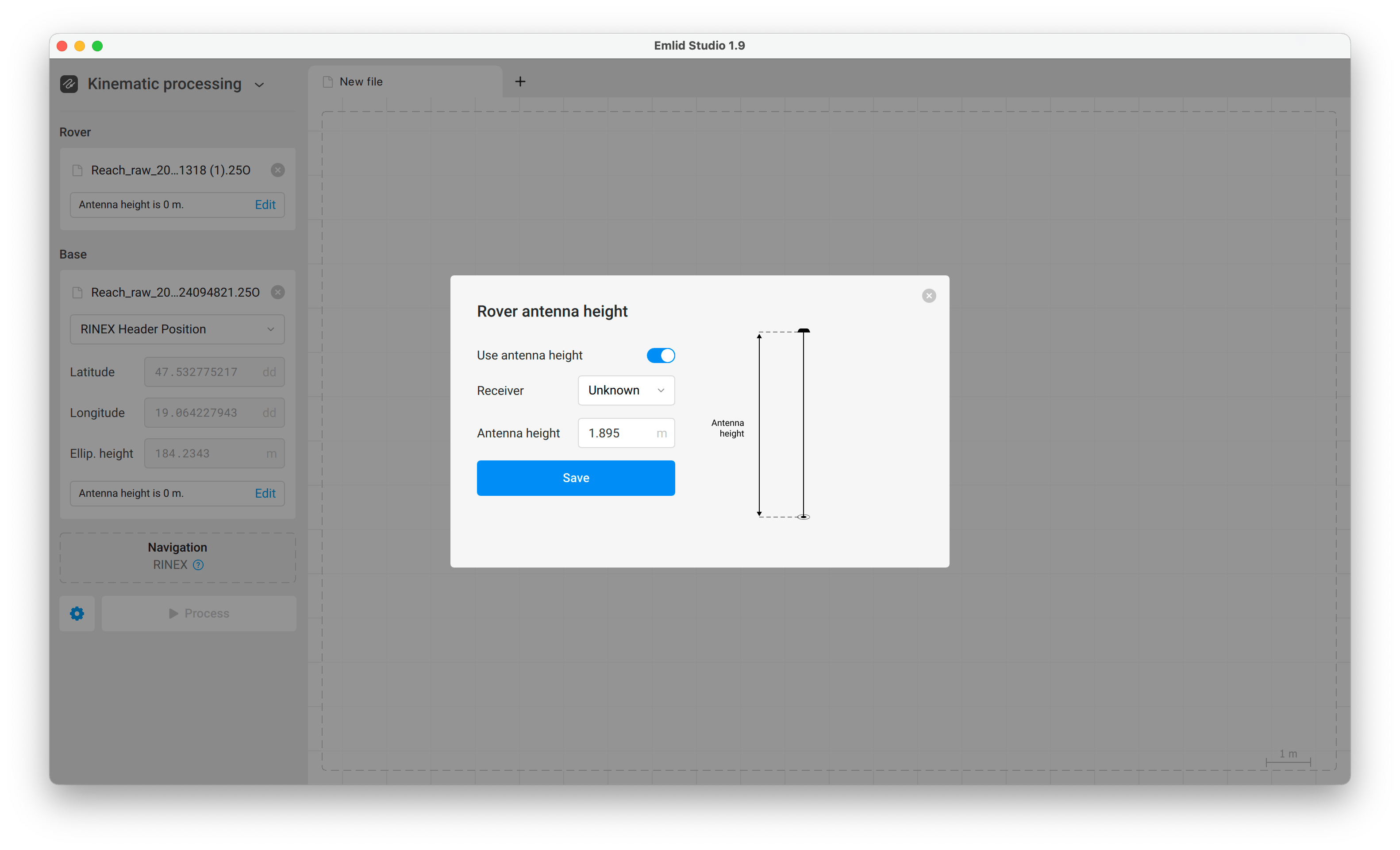
Sie müssen die Antennenhöhe in Emlid Studio sowohl für die Basis als auch für den Rover eingeben. Wählen Sie für das Feld Receiver (Empfänger) die Option Unknown (Unbekannt), und fügen Sie im Feld Antenna height (Antennenhöhe) die Stabhöhe plus den Phasenversatz der Antenne von 95 mm hinzu.