Comment configurer la hauteur de l'antenne pour le PPK
Ce guide explique comment configurer la hauteur de l'antenne sur votre base et votre rover pour garantir des élévations précises en PPK.
Vue d'ensemble
Les récepteurs Reach calculent les positions au centre de phase de l'antenne (APC). L'APC est le point effectif où les signaux GNSS sont reçus. Cependant, pour les tâches d'arpentage, vous avez généralement besoin des coordonnées du point au sol. Pour obtenir des coordonnées précises au niveau du sol, vous devez entrer la hauteur de l'antenne dans Emlid Flow.
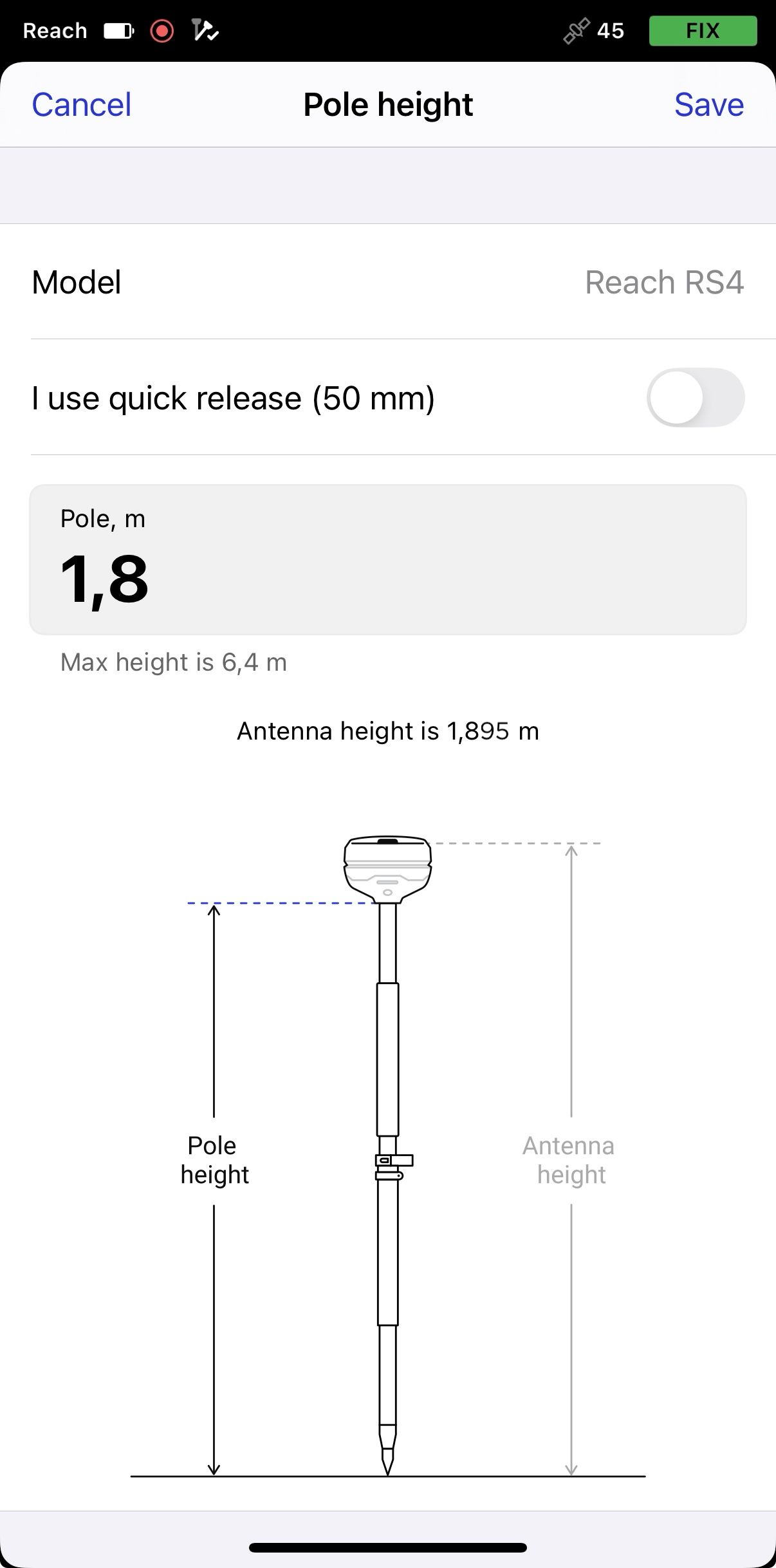
Pour les récepteurs GNSS, la hauteur de l'antenne est la distance entre la marque au sol et le centre de phase de l'antenne (APC). Cette hauteur se compose de deux éléments :
- la distance entre la marque au sol et le point central au bas du Reach, le point de référence de l'antenne (ARP),
- le décalage de l'antenne entre l'ARP et l'APC.
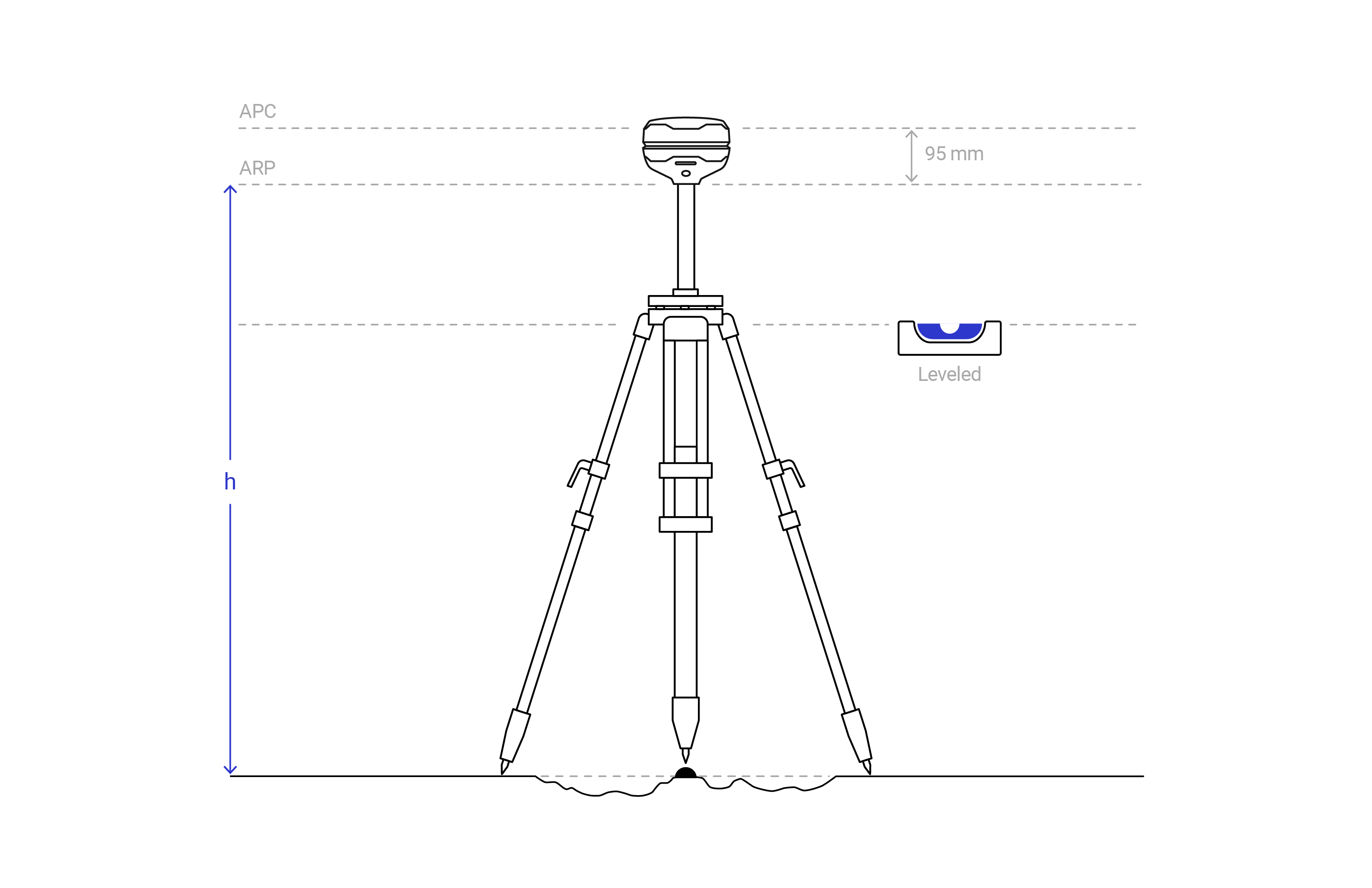
Dans Emlid Flow, vous devez uniquement entrer la hauteur jusqu'à l'ARP, qui est la hauteur jusqu'au bas du récepteur. L'application ajoute automatiquement le décalage de l'antenne, qui dépend de votre modèle Reach. De plus, lorsque vous définissez la hauteur de l'antenne dans une section de l'application, elle est mise à jour partout ailleurs. Cela maintient les valeurs cohérentes tout au long du workflow.
Pour synchroniser automatiquement la hauteur de l'antenne dans toutes les sections, assurez-vous que votre récepteur exécute la version de firmware 32 ou ultérieure. Dans les versions antérieures, vous devrez mettre à jour la hauteur manuellement dans chaque section.
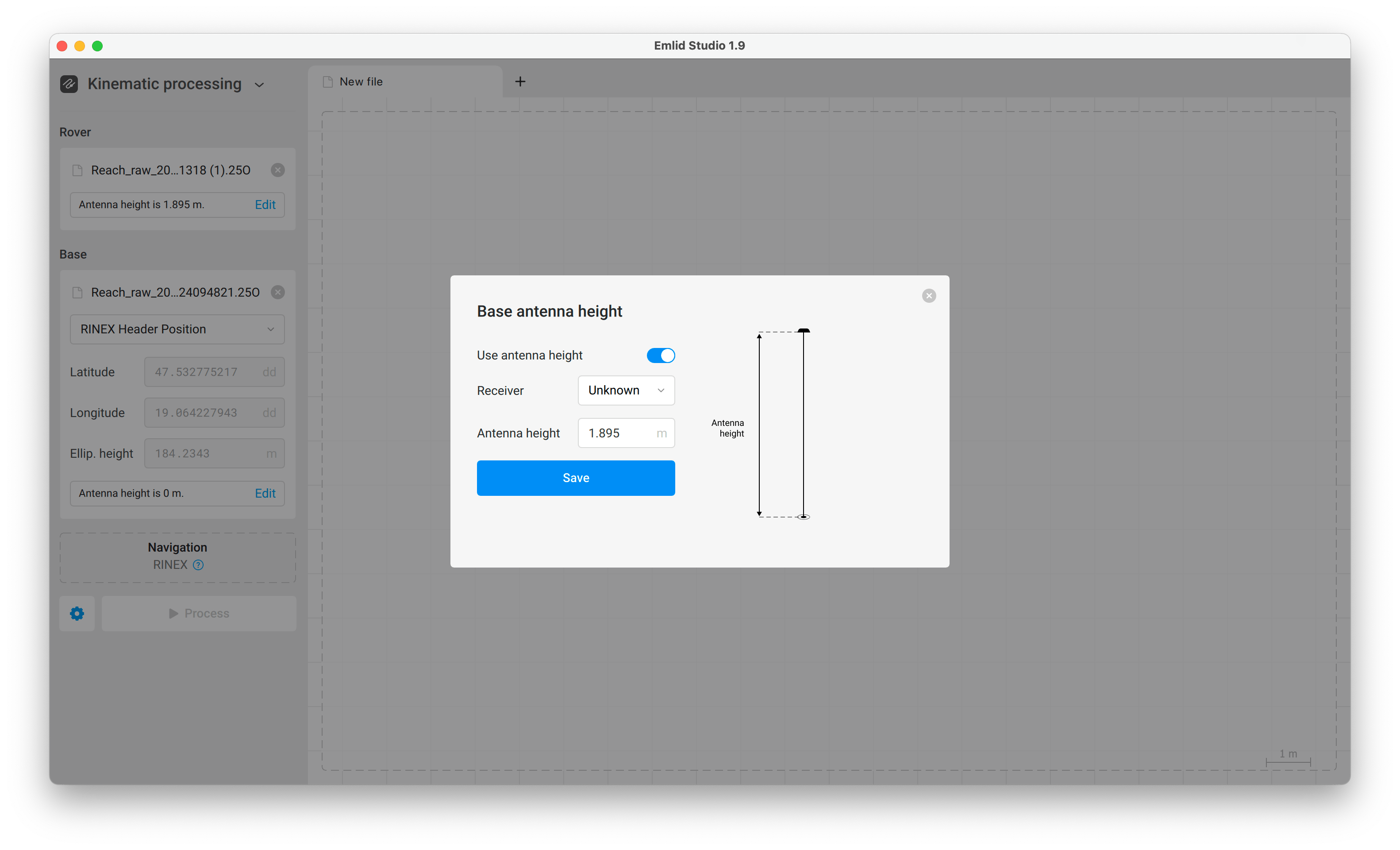
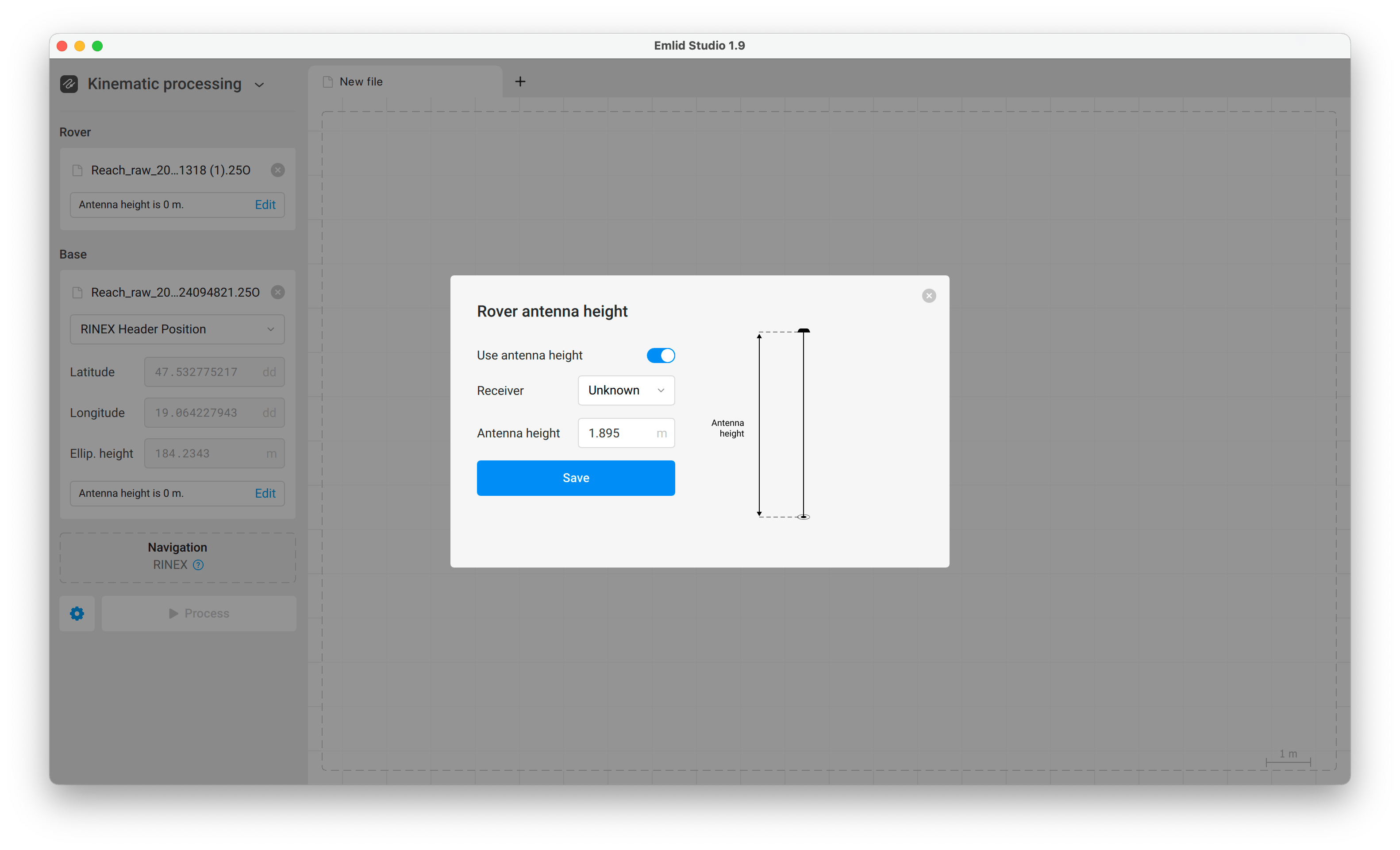
Pour le PPK, votre appareil Reach enregistre les logs au format RINEX, qui inclut la hauteur de l'antenne dans l'en-tête du fichier d'observation.Cependant, dans Emlid Studio, pour les Reach RS4 / RS4 Pro, vous devez actuellement saisir ces données manuellement. À cet endroit, lors de la configuration de la hauteur de l'antenne, vous devez choisir le type inconnu dans le champ Récepteur et ajouter le décalage du centre de phase de l'antenne de 95 mm plus la hauteur de la perche dans le champ Hauteur de l'antenne.
Ce guide étape par étape ci-dessous fait référence à la fois à la base et au rover. Pour ce flux de travail, nous utilisons le traitement cinématique, cependant, cela s'applique également à l'option Stop & Go, ainsi qu'à la géolocalisation PPK et la géolocalisation pour la sauvegarde RTK.
Stop & Go avec Emlid Flow vous permet d'améliorer les positions des points collectés sans lien de correction en temps réel entre la base et le rover. Cela peut arriver en raison d'une ligne de visée insuffisante, de l'absence de connexion Internet, de l'indisponibilité du service NTRIP, etc. Cette méthode sert également de sauvegarde RTK fiable et prend en charge la géolocalisation PPK pour la collecte de GCP. Pour traiter vos données dans Emlid Studio, vous aurez besoin des journaux RINEX de la base et du rover, d'un fichier de navigation et d'un CSV exporté depuis Emlid Flow.
Flux de travail
-
Ouvrez l'application Emlid Flow et connectez-vous à votre récepteur.
-
Dans l'onglet Receivers (Récepteurs), appuyez sur Logging (Enregistrement).
-
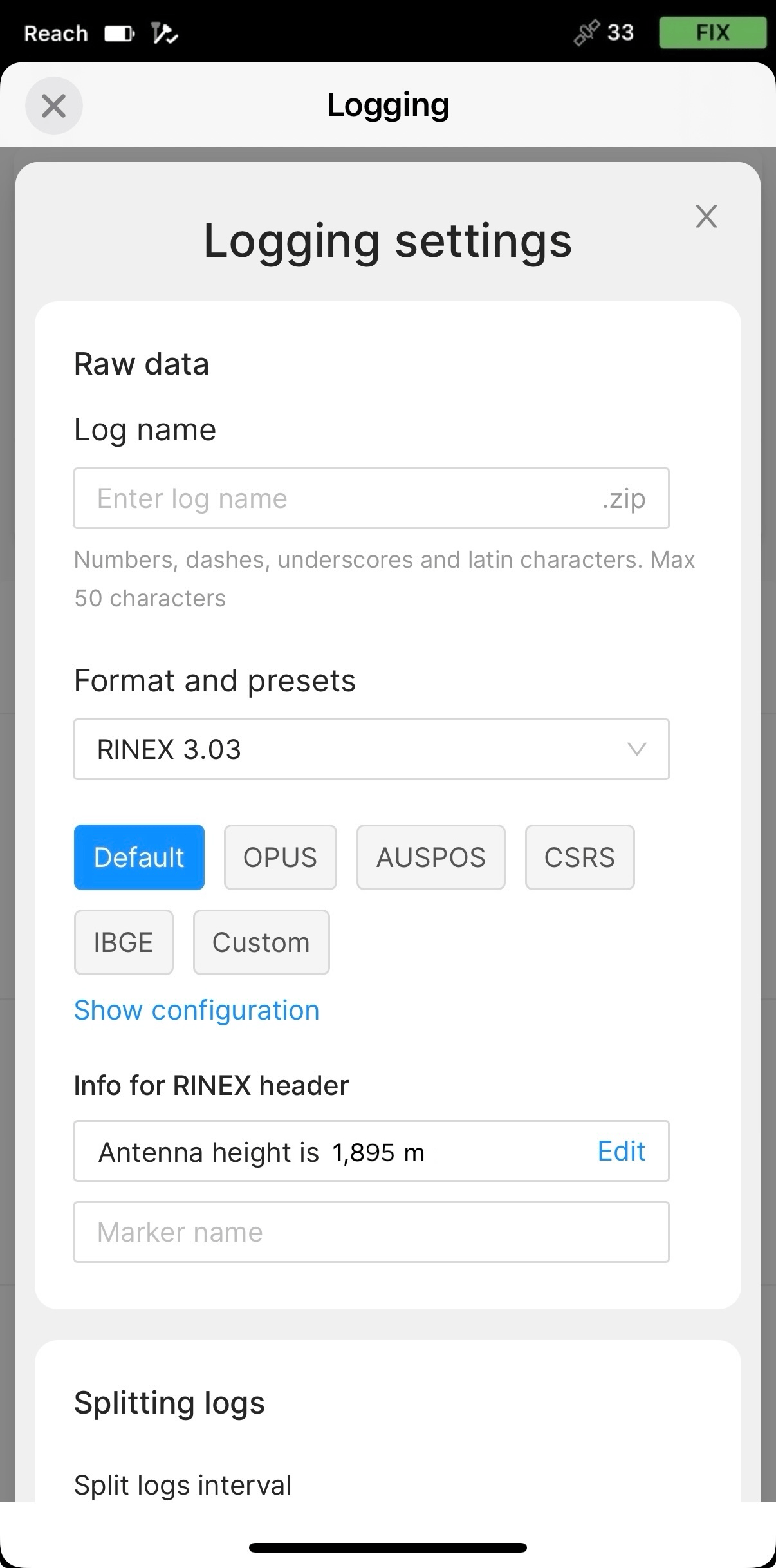
Allez dans l'onglet Recorded Logs and Settings (Journaux enregistrés et paramètres) et appuyez sur le bouton d'engrenage bleu.

-
Sous Info for RINEX header (Infos pour l'en-tête RINEX), appuyez sur Edit (Modifier) et définissez la hauteur mesurée de votre trépied ou de votre perche d'arpentage.
-
Appuyez sur Save (Enregistrer), puis sur Apply (Appliquer), et commencez le Logging (Enregistrement).
Vous devez saisir la hauteur de l'antenne dans Emlid Studio pour la base et le rover. Sélectionnez Unknown (Inconnu) pour le champ Receiver (Récepteur), et ajoutez la hauteur du jalon plus le décalage du centre de phase de l'antenne de 95 mm dans le champ Antenna height (Hauteur de l'antenne).