Come impostare l'altezza dell'antenna per PPK
Questa guida spiega come impostare l'altezza dell'antenna sulla base e sul rover per garantire quote precise in PPK.
Panoramica
I ricevitori Reach calcolano le posizioni nel centro di fase dell'antenna (APC). L'APC è il punto effettivo in cui vengono ricevuti i segnali GNSS. Tuttavia, per le attività di rilievo, solitamente sono necessarie le coordinate del punto a terra. Per ottenere coordinate precise a livello del suolo, è necessario inserire l'altezza dell'antenna in Emlid Flow.
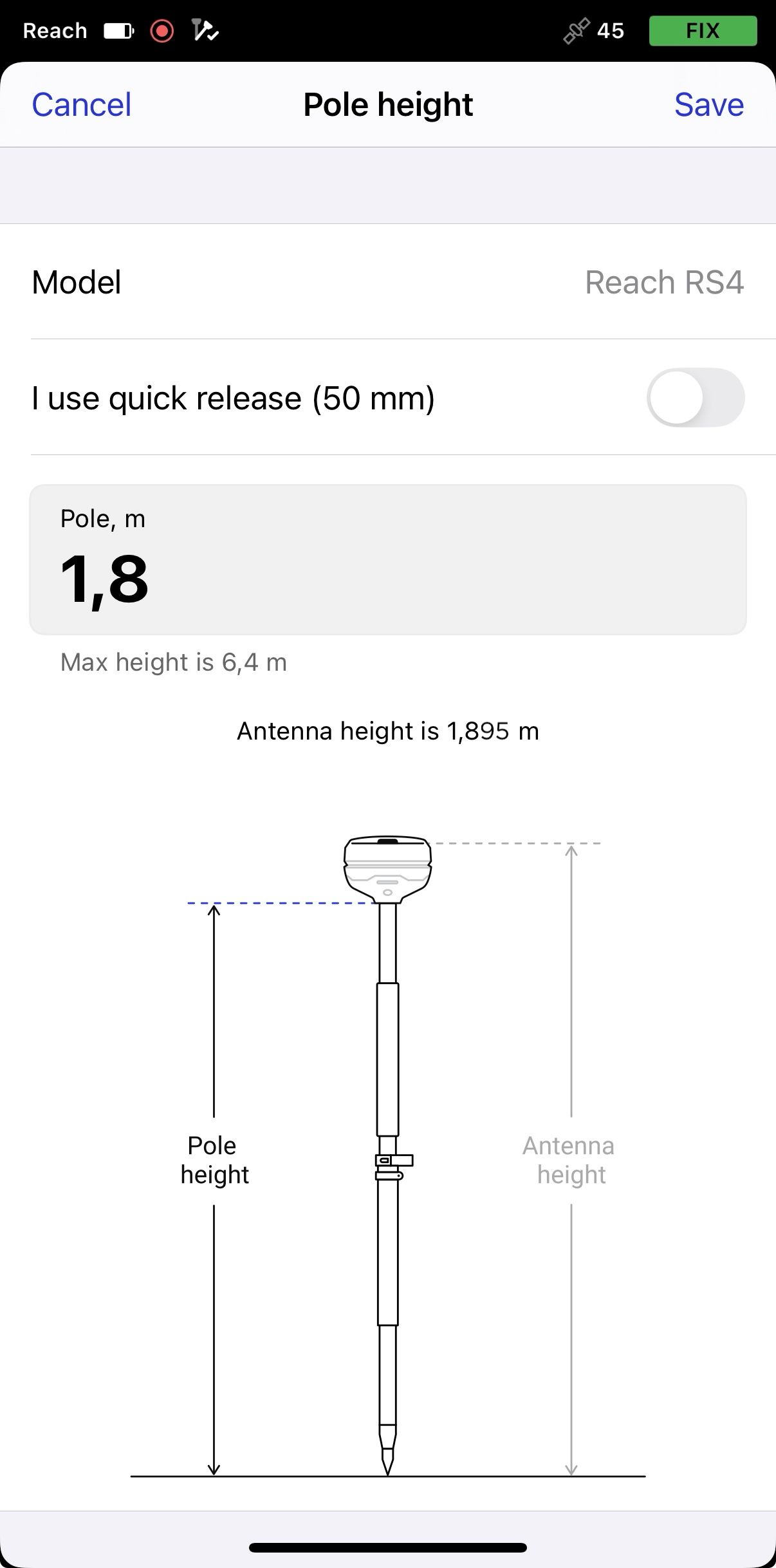
Per i ricevitori GNSS, l'altezza dell'antenna è la distanza dal punto di riferimento a terra fino al centro di fase dell'antenna (APC). Questa altezza è composta da due elementi:
- la distanza tra il punto di riferimento a terra e il punto centrale alla base del Reach, il punto di riferimento dell'antenna (ARP),
- l'offset dell'antenna tra l'ARP e l'APC.
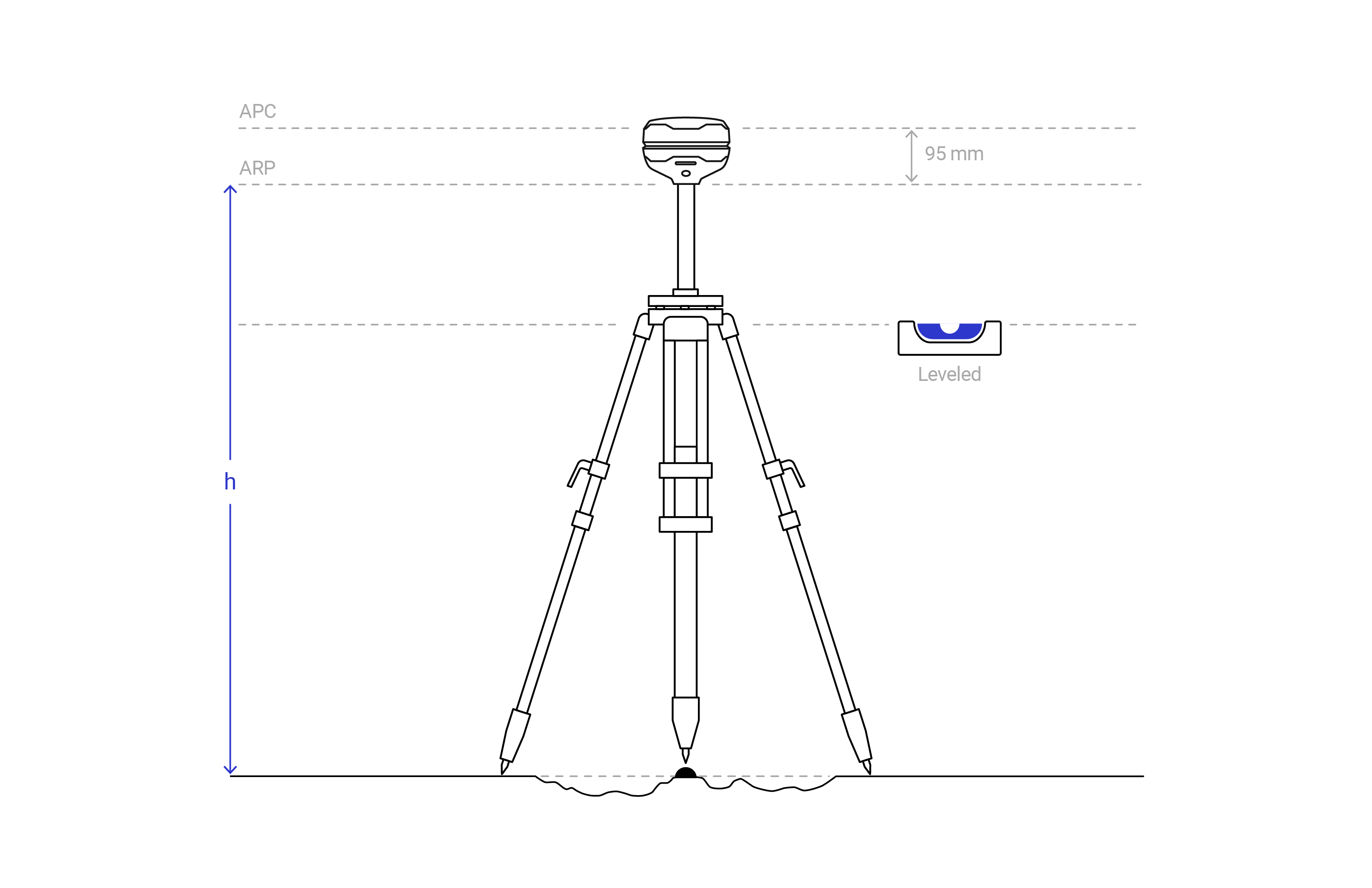
In Emlid Flow, è sufficiente inserire l'altezza fino all'ARP, che corrisponde all'altezza fino alla base del ricevitore. L'app aggiunge automaticamente l'offset dell'antenna, che dipende dal modello di Reach. Inoltre, quando si imposta l'altezza dell'antenna in una sezione dell'app, questa viene aggiornata ovunque. Ciò mantiene i valori coerenti durante tutto il flusso di lavoro.
Per sincronizzare automaticamente l'altezza dell'antenna tra le sezioni, assicurarsi che sul ricevitore sia in esecuzione la versione firmware 32 o successiva. Nelle versioni precedenti, è necessario aggiornare manualmente l'altezza in ogni sezione.
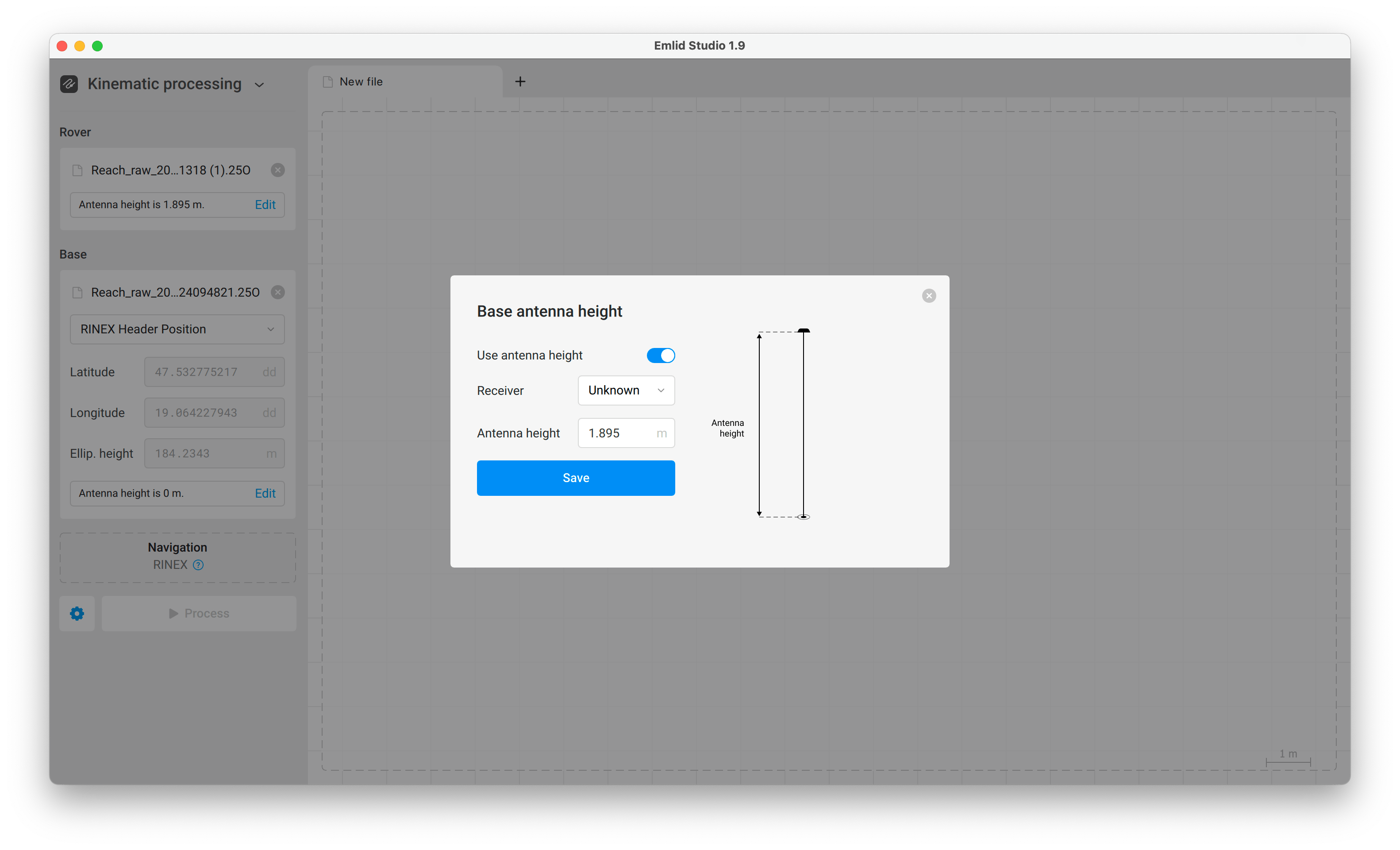
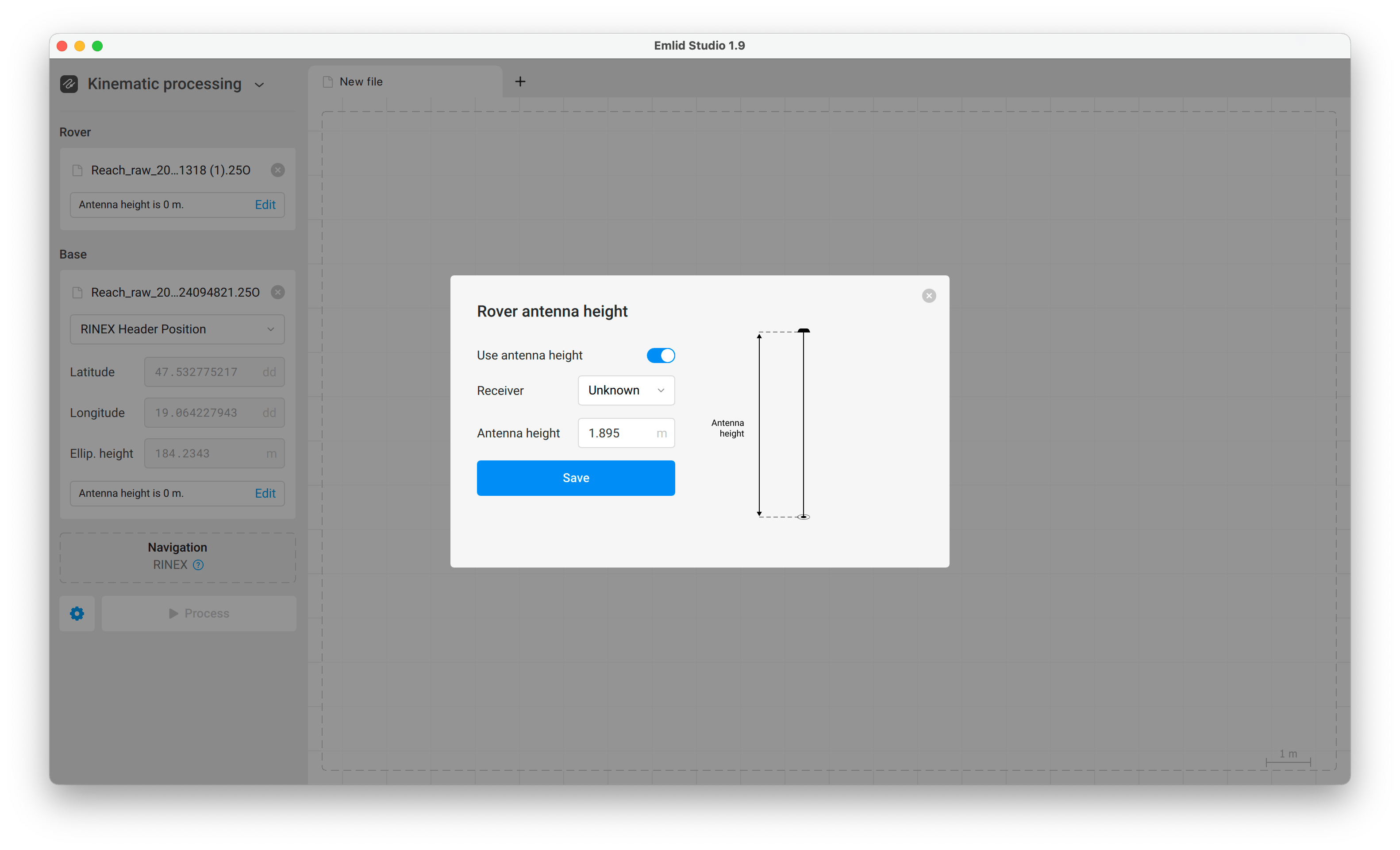
Per il PPK, il dispositivo Reach registra i log in formato RINEX, che include l'altezza dell'antenna nell'intestazione del file di osservazione.Tuttavia, in Emlid Studio, per Reach RS4 / RS4 pro, è attualmente necessario inserire questi dati manualmente. Lì, durante l'impostazione dell'altezza dell'antenna, è necessario scegliere il tipo sconosciuto nel campo Receiver (Ricevitore) e aggiungere l'offset del centro di fase dell'antenna di 95 mm più l'altezza del palo nel campo Antenna height (Altezza antenna).
La seguente guida passo-passo si riferisce sia alla base che al rover. Per questo flusso di lavoro, utilizziamo l'opzione Elaborazione cinematica (Kinematic processing), tuttavia, questo vale anche per l'opzione Stop & Go (Ferma e vai), così come per il geotagging PPK e il geotagging per il backup RTK.
Lo Stop & Go con Emlid Flow consente di migliorare le posizioni dei punti rilevati senza un collegamento di correzione in tempo reale tra la base e il rover. Ciò può accadere a causa di una linea di vista insufficiente, dell'assenza di una connessione a Internet, dell'indisponibilità del servizio NTRIP, ecc. Questo metodo serve anche come backup RTK affidabile e supporta il geotagging PPK per la raccolta di GCP. Per elaborare i dati in Emlid Studio, saranno necessari i log RINEX sia della base che del rover, un file di navigazione e un CSV esportato da Emlid Flow.
Flusso di lavoro
-
Aprire l'app Emlid Flow e connettersi al ricevitore.
-
Nella scheda Receivers (Ricevitori), toccare Logging (Registrazione).
-
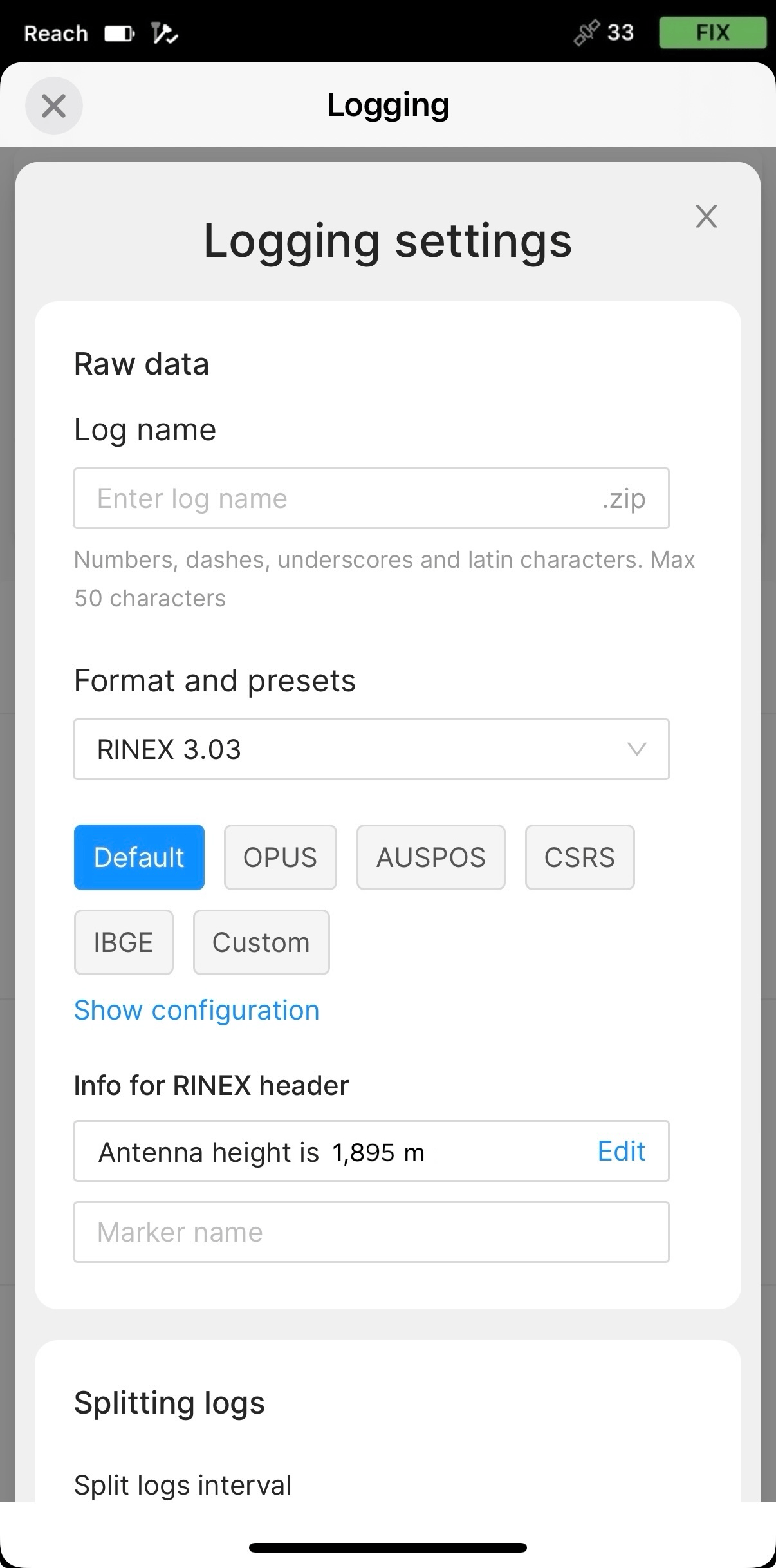
Andare alla scheda Recorded Logs and Settings (Registri e impostazioni memorizzati) e toccare il pulsante blu a forma di ingranaggio.

-
Sotto l'intestazione Info for RINEX (Informazioni per RINEX), toccare Edit (Modifica) e impostare l'altezza misurata del treppiede o della palina topografica.
-
Toccare Save (Salva), quindi Apply (Applica) e avviare Logging (Registrazione).
È necessario inserire l'altezza antenna in Emlid Studio sia per la Base che per il Rover. Scegliere Unknown (Sconosciuto) per il campo Receiver (Ricevitore) e aggiungere l'altezza del palo più l'offset del centro di fase dell'antenna di 95 mm nel campo Antenna height (Altezza antenna).