Como configurar a altura da antena para o PPK
Este guia explica como configurar a altura da antena em sua base e no rover para garantir elevações precisas no PPK.
Visão geral
Os receptores Reach calculam as posições no centro de fase da antena (APC). O APC é o ponto efetivo em que os sinais GNSS são recebidos. No entanto, para tarefas de levantamento, você geralmente precisa das coordenadas do ponto no solo. Para obter coordenadas precisas no nível do solo, é necessário inserir a altura da antena no Emlid Flow.
Para receptores GNSS, a altura da antena é a distância da marca no solo até o centro de fase da antena (APC). Essa altura consiste em dois elementos:
-
a distância entre a marca no solo e o ponto central na parte inferior do Reach, o ponto de referência da antena (ARP),
-
o deslocamento da antena entre o ARP e o APC.
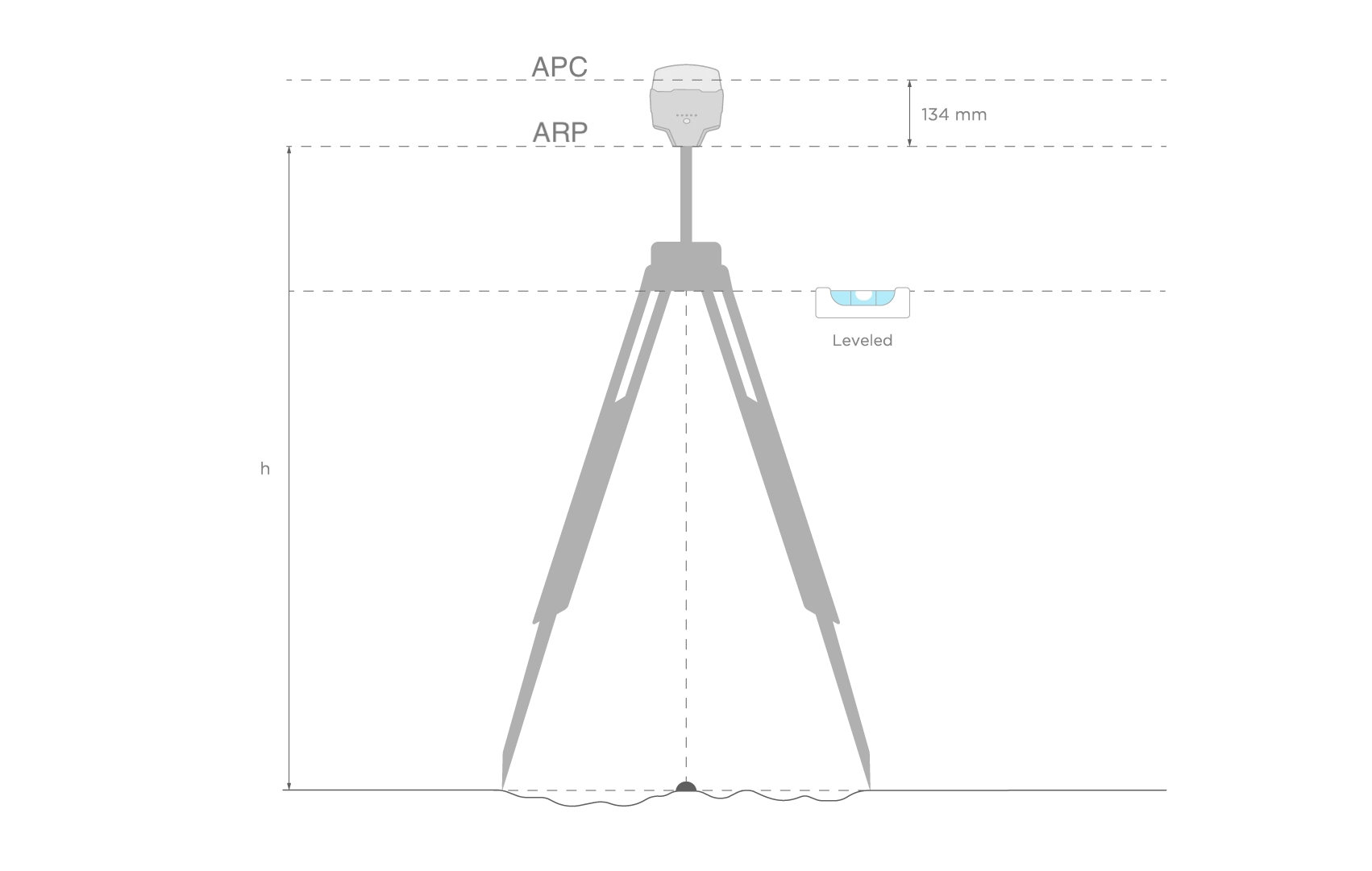
No Emlid Flow, você só precisa inserir a altura até o ARP, que é a altura até a parte inferior do receptor. O aplicativo adiciona automaticamente o deslocamento da antena, que depende do modelo do seu Reach. Além disso, quando você define a altura da antena em uma seção do aplicativo, ela é atualizada em todas as outras. Isso mantém os valores consistentes em todo o fluxo de trabalho.
Para sincronizar automaticamente a altura da antena entre as seções, verifique se o receptor está executando a versão 32 ou posterior do firmware. Em versões anteriores, você precisará atualizar a altura manualmente em cada seção.
Para o PPK, o dispositivo Reach registra os logs no formato RINEX, que inclui a altura da antena no cabeçalho do arquivo de observação. O Emlid Studio lê esse valor durante o pós-processamento e o utiliza para calcular posições precisas no solo. Se necessário, você pode revisar e ajustar a altura da antena da base e do rover diretamente no Emlid Studio.
Este guia passo a passo abaixo se refere tanto à base quanto ao rover. Para esse fluxo de trabalho, usamos o Kinematic processing (processamento cinemático); no entanto, isso se aplica à opção Stop & Go, bem como ao georreferenciamento PPK e ao georreferenciamento para backup RTK.
O Stop & Go com Emlid Flow permite melhorar as posições dos pontos coletados sem um link de correção em tempo real entre a base e o rover. Isso pode ocorrer devido à linha de visão insuficiente, à ausência de conexão com a Internet, à indisponibilidade do serviço NTRIP, etc. Esse método também serve como um backup RTK confiável e oferece suporte ao georreferenciamento PPK para coleta de GCP. Para processar seus dados no Emlid Studio, você precisará dos registros RINEX da base e do rover, de um arquivo de navegação e de um CSV exportado do Emlid Flow.
Fluxo de trabalho
-
Abra o aplicativo Emlid Flow e conecte-se ao seu receptor.
-
Na guia Receivers (Receptores), toque em Logging (Armazenamento).
-
Vá para a aba Recorded Logs and Settings (Logs e configurações gravados) e toque no botão de engrenagem azul.

-
No cabeçalho Info for RINEX, toque em Edit (Editar) e defina a altura medida de seu tripé ou bastão de levantamento.


-
Toque em Save (Salvar), depois em Apply (Aplicar) e inicie o Logging (Armazenamento).
Você também pode ajustar a altura da antena para a base e o rover posteriormente durante o processamento de dados no [Emlid Studio] (https://docs.emlid.com/emlid-studio/), se necessário.

