Cómo configurar la altura de antena para PPK
Esta guía explica cómo configurar la altura de antena en su base y rover para asegurar elevaciones exactas en PPK.
Resumen
Los receptores Reach calculan las posiciones en el centro de fase de la antena (APC). El APC es el punto efectivo donde se reciben las señales GNSS. Sin embargo, para las tareas de topografía, normalmente se necesitan las coordenadas del punto sobre el terreno. Para obtener coordenadas exactas a nivel del suelo, debe introducir la altura de antena en Emlid Flow.
Para los receptores GNSS, la altura de antena es la distancia desde la marca en el suelo hasta el centro de fase de la antena (APC). Esta altura consta de dos elementos:
-
la distancia entre la marca en el suelo y el punto central en la parte inferior del Reach, el punto de referencia de la antena (ARP),
-
el desplazamiento de antena entre el ARP y el APC.
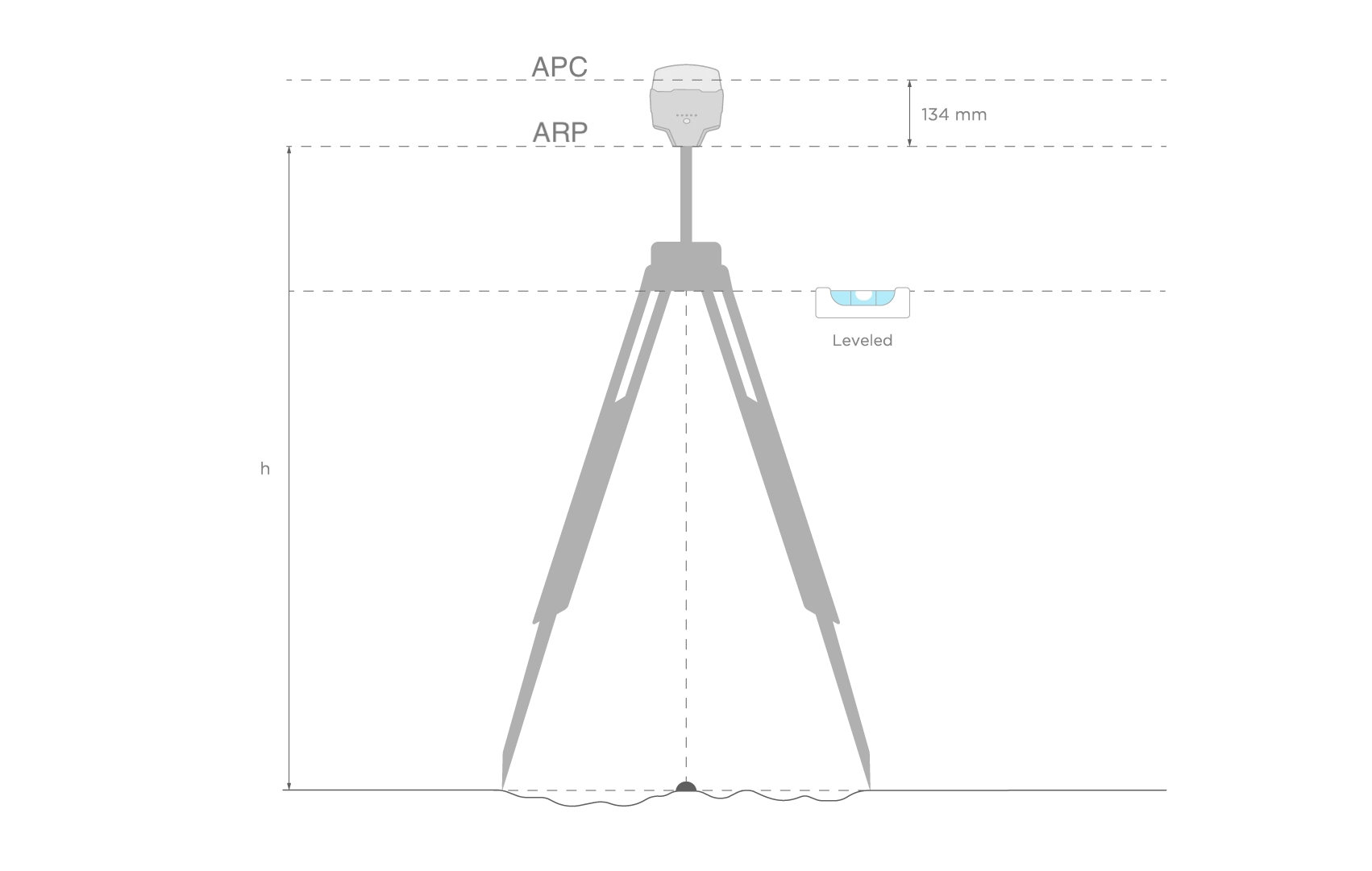
En Emlid Flow, solo es necesario introducir la altura hasta el ARP, que es la altura hasta la parte inferior del receptor. La aplicación añade automáticamente el desplazamiento de la antena, que dependerá del modelo de su Reach. Además, cuando se ajusta la altura de antena en una sección de la aplicación, se actualiza en todas las demás. Esto mantiene los valores coherentes en todo el flujo de trabajo.
Para sincronizar automáticamente la altura de antena en todas las secciones, asegúrese de que su receptor tiene instalada la versión 32 o posterior del firmware. En versiones anteriores, tendrá que actualizar la altura manualmente en cada sección.
Para PPK, su dispositivo Reach graba los registros en formato RINEX, que incluye la altura de antena en el encabezado del archivo de observación. Emlid Studio lee este valor durante el posprocesamiento y lo utiliza para calcular posiciones exactas sobre el terreno. Si fuera necesario, puede revisar y ajustar la altura de antena de la base y del rover directamente en Emlid Studio.
Esta guía paso a paso se refiere tanto a la base como al rover. Para este flujo de trabajo, utilizamos el procesamiento cinemático, sin embargo, esto se aplica a la opción Stop & Go, así como al geoetiquetado PPK y al geoetiquetado para copia de seguridad RTK.
Stop & Go con Emlid Flow permite mejorar las posiciones de los puntos recolectados sin un enlace de corrección en tiempo real entre la base y el rover. Esto puede deberse a una línea de visión insuficiente, ausencia de conexión a Internet, no disponibilidad del servicio NTRIP, etc. Este método también sirve como copia de seguridad RTK fiable y admite el geoetiquetado PPK para la recolección de GCP. Para procesar los datos en Emlid Studio, necesitará los registros RINEX de la base y del rover, un archivo de navegación y un CSV exportado desde Emlid Flow.
Flujo de trabajo
-
Abra la aplicación Emlid Flow y conéctese a su receptor.
-
En la pestaña Receivers (Receptores), pulse Logging (Registro).
-
Vaya a la pestaña Recorded Logs and Settings (Registros grabados y configuración) y pulse el botón azul de engranaje.

-
Bajo el encabezado Info for RINEX header (Información para RINEX), pulse Edit (Editar) y establezca la altura medida de su trípode o poste topográfico.


-
Pulse Save (Guardar), después Apply (Aplicar) y comience a Logging (Registrar).
También puede ajustar la altura de antena tanto para la base como para el rover posteriormente durante el procesamiento de datos en Emlid Studio si fuera necesario.

