Configurazione del kit UAV Reach per la mappatura PPK
Questa guida spiega come configurare i ricevitori Reach per la mappatura PPK con UAV.
Prima di iniziare, si consiglia di consultare l'articolo Come funziona il PPK.
Panoramica
Per configurare il kit UAV Reach per la mappatura PPK, sono necessari i seguenti elementi:
- Base Reach RS2/RS2+ o Reach RS+
- Rover Reach M2/M+ con antenna GNSS
- Adattatore per slitta a contatto caldo (HSA) per una fotocamera
- Qualsiasi fotocamera che fornisca l'accesso alla slitta a contatto caldo (ad es. Sony, Canon, Nikon)
Reach RS+ non può fungere da base per un rover Reach M2, poiché Reach M2 richiede correzioni multifrequenza. È comunque possibile utilizzare Reach RS2/RS2+ come base per Reach M+. Si noti che in questo caso non si otterranno tutti i vantaggi del ricevitore multi-banda. Per saperne di più sulle differenze tra ricevitori a banda singola e a banda multipla, è possibile consultare l'articolo Banda singola vs banda multipla.
Inoltre, sono necessari alcuni punti di controllo a terra (GCP). Per posizionare i GCP, sono necessari una base e un rover, oppure è possibile utilizzare un ricevitore connesso a un NTRIP.
In questa guida ci concentriamo principalmente sulla parte dell'integrazione relativa all'apparecchiatura GNSS. Tuttavia, sono necessari anche un UAV e un PC con una stazione di controllo a terra e un software fotogrammetrico. I 2 requisiti principali per l'UAV sono:
- La presenza o la possibilità di installare una fotocamera con un connettore per slitta a contatto caldo
- Funzionalità che consente l'attivazione della fotocamera: dalla fotocamera stessa o dal pilota automatico
Configurazione hardware di Reach M2/M+
Connessione di Reach M2/M+ a una fotocamera tramite HSA
L'HSA consente a Reach M2/M+ di registrare con precisione un marcatore temporale ogni volta che la fotocamera scatta una foto.
La fotocamera deve essere dotata di una slitta a contatto caldo per l'integrazione con Reach M2/M+. Se si utilizza un DJI Mavic o Phantom che non fornisce l'accesso alla slitta a contatto caldo, è sempre possibile lavorare con i GCP.
Per collegare Reach a una fotocamera con un adattatore per slitta a contatto caldo, utilizzare il cavo JST-GH a 5 pin fornito con Reach M2/M+. Inserire il connettore della slitta a contatto caldo nella slitta a contatto caldo della fotocamera e il connettore JST-GH nella porta С1 di Reach M2/M+.


Attivazione della fotocamera
A seconda dell'applicazione, esistono diversi modi per attivare una fotocamera.
-
Attivazione tramite fotocamera. Alcune fotocamere offrono una funzione Timelapse che consente di scattare foto a intervalli regolari. Se la fotocamera supporta questa opzione, si consiglia di utilizzarla poiché è il modo più semplice e diretto.
suggerimentoOgni fotocamera utilizza porte diverse per l'attivazione. Potrebbe trattarsi di una porta USB o HDMI. Leggere il manuale della fotocamera per scoprire come attivarla.
-
Attivazione tramite pilota automatico. Esistono diverse opzioni per l'attivazione della fotocamera tramite piloti automatici:
-
Attivazione dell'otturatore della fotocamera ai punti intermedi. Il pilota automatico può attivare l'otturatore ogni volta che il drone raggiunge un punto intermedio. Se si utilizza un controllore di volo basato su ArduPilot, consultare la guida Controllo della fotocamera nelle missioni automatiche di ArduPilot per maggiori dettagli.
-
Attivazione dell'otturatore della fotocamera a intervalli regolari. Consultare la guida Configurazione dell'otturatore della fotocamera di ArduPilot per saperne di più.
-
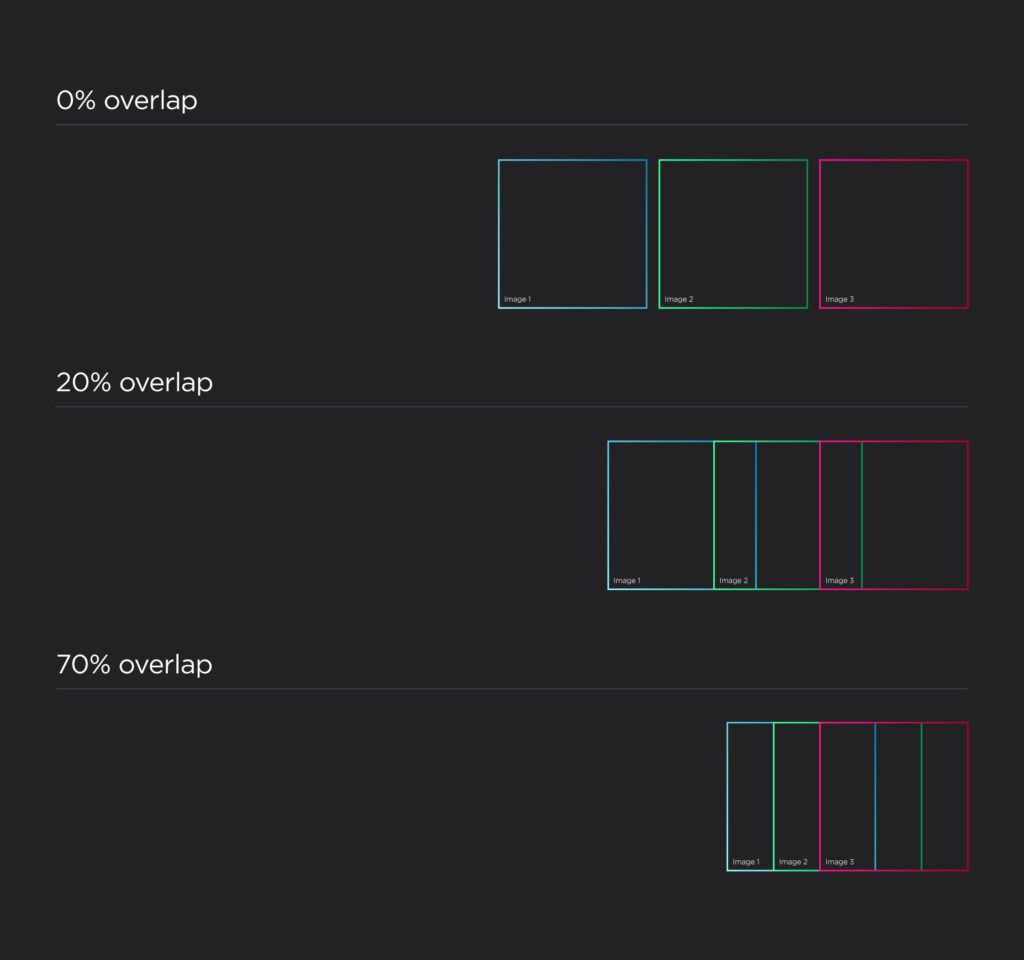
La maggior parte dei software delle stazioni di controllo a terra consente e persino richiede la preparazione di un piano di missione prima del volo. È necessario configurare la fotocamera e il pilota automatico in modo che acquisisca immagini con sovrapposizioni. Questo è necessario perché i punti comuni nelle immagini adiacenti sono necessari per creare un mosaico ortogonale. Si consiglia una sovrapposizione frontale di almeno il 60% circa e una laterale di circa il 30%.
Posizionamento dell'antenna
L'antenna GNSS deve essere posizionata su un piano di massa. Il piano di massa dell'antenna deve essere conduttivo e di almeno 70 x 70 mm. A questo scopo, dovrebbe andare bene una normale piastra metallica.
Le antenne elicoidali non richiedono un piano di massa. Tuttavia, un piano di massa può migliorare in modo significativo la qualità dell'osservazione.
Per saperne di più, consultare la guida Posizionamento dell'antenna.
Isolamento di Reach M2/M+ da potenziali interferenze
In alcuni casi, potrebbe essere necessario isolare il Reach per garantire la migliore qualità di registrazione. Il motivo è che la potenza trasmessa dei segnali GNSS è piuttosto bassa rispetto al possibile rumore proveniente da altri componenti hardware installati sull'UAV. Ciò significa che la potenza del segnale dell'antenna potrebbe essere instabile e a volte persino interrotta. L'interruzione e la perdita temporanea del segnale sul ricevitore RTK sono chiamate cycle slip.
Per evitare i cycle slip, si consiglia di isolare l'unità Reach M2/M+ e di collegarla a terra per eliminare le interferenze. Anche i componenti RC, come i trasmettitori radio, potrebbero influenzare il segnale. Reach deve essere posizionato il più lontano possibile da essi.
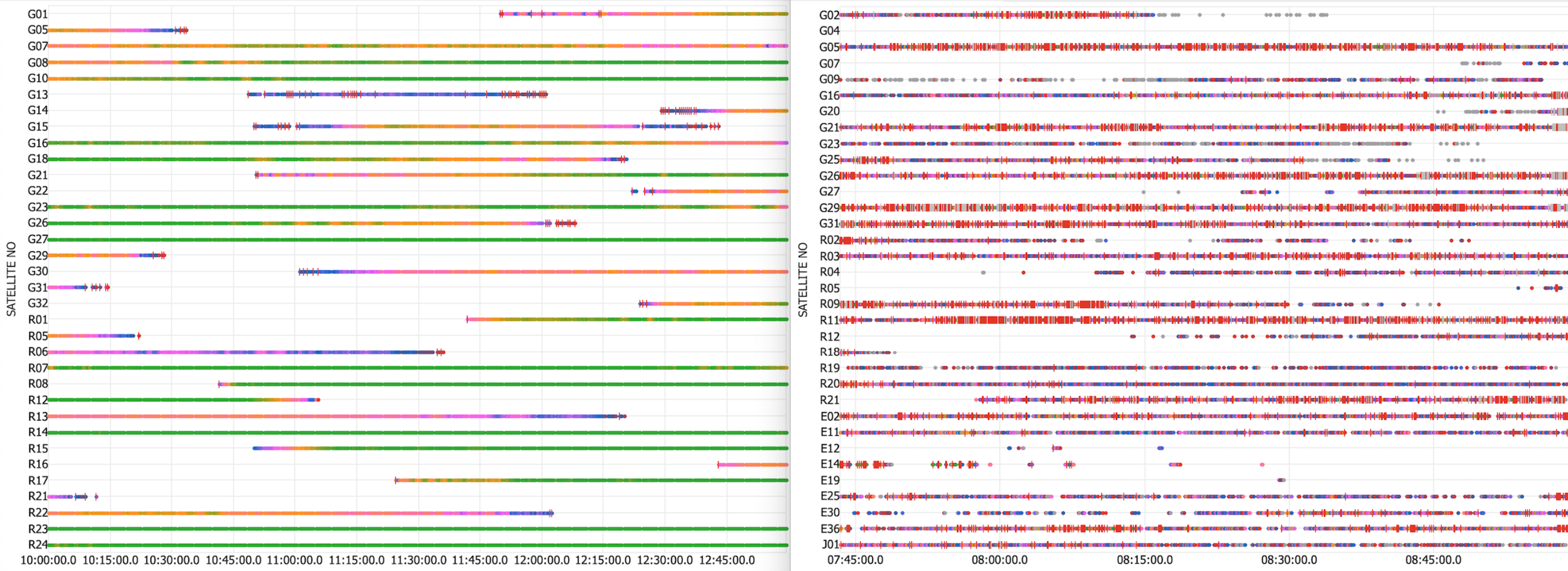
Gli effetti di una cattiva configurazione hardware sono notevoli. Una scarsa qualità del segnale con bassi valori di SNR e molti cycle slip pongono problemi per ottenere soluzioni fisse e per la perdita di marcatori temporali. Si osservino le figure seguenti che illustrano esempi di una buona (l'immagine a sinistra) e di una cattiva (quella a destra) ricezione satellitare.
Creare un argomento sul forum della community Emlid in caso di difficoltà in questa fase.
Configurazione della base Reach RS2/RS2+/RS+
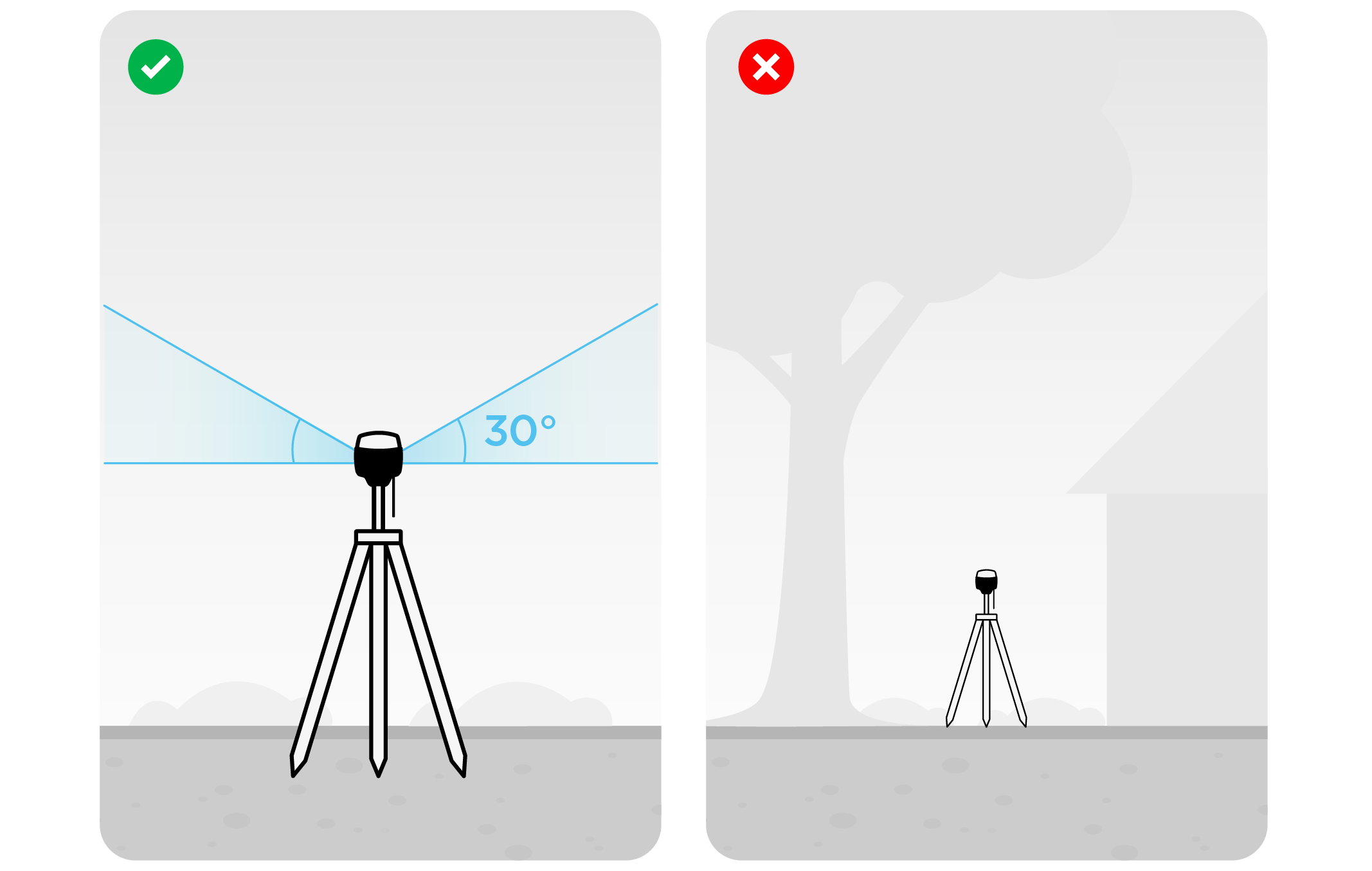
Osservare la figura sottostante e scegliere una posizione appropriata per posizionare la stazione base Reach RS2/RS2+ o Reach RS+. Le regole di base sono:
- Buon angolo di cielo sopra i 30 gradi
- Lontano da alberi ed edifici
- Nessuna elettricità nelle vicinanze
Per saperne di più, consultare la guida Posizionamento della base.
Configurazione di base e rover prima del volo
Impostazioni del rover Reach M2/M+
-
Alimentare il Reach M2/M+ da una fonte di alimentazione esterna o dalla batteria del drone.
suggerimentoPer saperne di più, consultare la guida Alimentazione.
-
Accedere a Reach M2/M+ in Emlid Flow.
suggerimentoPer saperne di più, consultare le guide Connessione a Reach e Connessione di Reach a Internet.
-
Andare alle impostazioni RTK e configurare una delle selezioni GNSS e una frequenza di aggiornamento raccomandate per la registrazione dei marcatori temporali:
note- Reach M2
- Reach M+
Reach M2 traccia i sistemi satellitari GPS, GLONASS, GALILEO, QZSS e BeiDou. I dati possono essere registrati con una frequenza di aggiornamento di 1 Hz, 5 Hz o 10 Hz.
Per il volo di un drone, è meglio impostare la frequenza di aggiornamento a 10 Hz.
Selezione GNSS Frequenze di aggiornamento consentite per Reach M+ GPS + GLONASS + GALILEO + SBAS + QZSS 1 Hz GPS + GLONASS + QZSS 5 Hz GPS + GALILEO 5 Hz GPS 10 Hz -
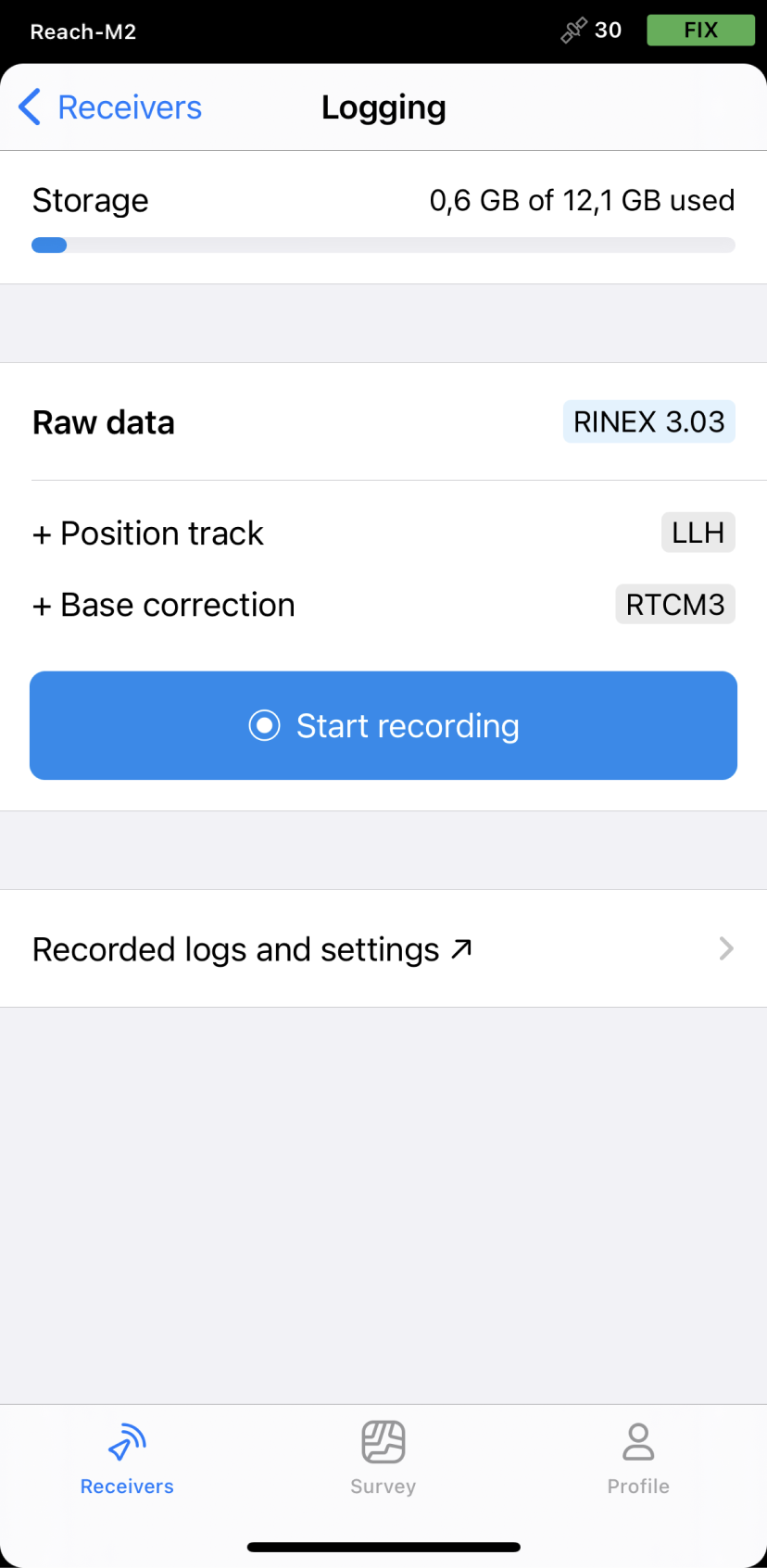
Abilitare la registrazione dei dati grezzi nella schermata Logging (Registrazione):
Impostazioni della base Reach RS2/RS2+/RS+
-
Accendere l'unità Reach RS2/RS2+ o Reach RS+.
-
Accedere al ricevitore in Emlid Flow.
-
Andare alla schermata GNSS settings (Impostazioni GNSS).
-
Scegliere lo stesso GNSS di Reach M2/M+ con una frequenza di aggiornamento GNSS di 1 Hz.
-
Abilitare la registrazione dei dati grezzi nella schermata Logging (Registrazione).
Posizionamento dei punti di controllo a terra
I punti di controllo a terra (GCP) sono punti con coordinate note a terra nell'area di interesse. I GCP di solito aiutano a migliorare e controllare l'accuratezza, a ottenere la scala e l'orientamento corretti della mappa. Inoltre, sono necessari per il posizionamento assoluto della mappa in relazione al mondo reale circostante.
Consultare la guida Posizionamento della base per saperne di più sull'accuratezza assoluta e relativa.
Reach fornisce coordinate con accuratezza centimetrica in PPK. Inoltre, se si posiziona la base su un punto con coordinate note, si otterranno le coordinate con accuratezza assoluta. In tal caso, i GCP possono aiutare a verificare l'accuratezza.
I GCP devono essere chiaramente visibili sulle immagini del drone. Assicurarsi che il marcatore sia in contrasto con l'ambiente circostante e che sia abbastanza grande. Posizionare una palina topografica con un ricevitore esattamente al centro del marcatore per rilevarne le coordinate.
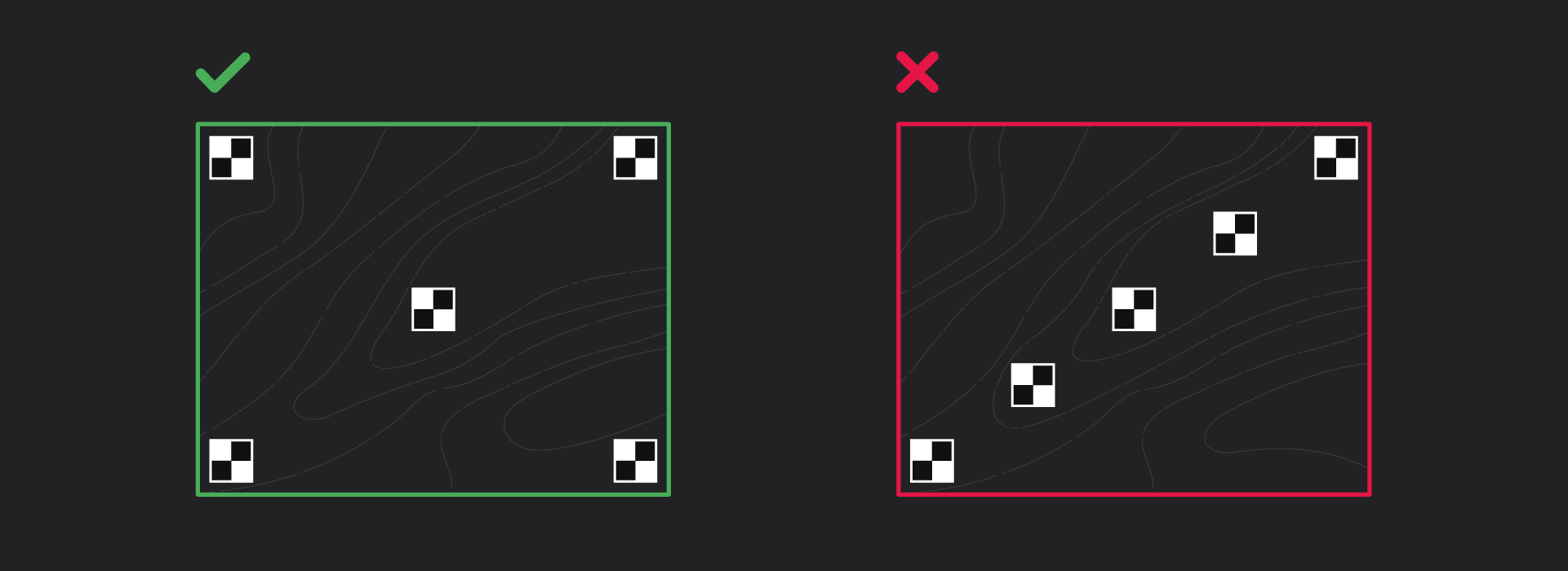
La quantità sufficiente di GCP dipende dall'area del sito. Di solito, si tratta di 5-10 punti. Esistono alcune regole di base per il posizionamento dei punti di controllo:
- Devono essere distribuiti in modo uniforme nell'area in cui si effettua il rilievo. Ad esempio, se si utilizzano 5 punti, posizionarne uno per ogni angolo e l'ultimo al centro dell'area
- Non devono trovarsi sulla stessa linea
Inoltre, è ottimo se si ha la possibilità di posizionare i GCP nei punti più alti e più bassi del sito. Aiuta a eseguire la corretta proiezione piana.
È importante soddisfare questi requisiti se si vuole ottenere la stessa accuratezza su tutto l'appezzamento.
Consultare la guida Posizionamento dei GCP per saperne di più.
Volo di rilievo
Non prestiamo molta attenzione a questa fase a causa delle differenze nelle impostazioni di volo del drone da un modello all'altro. Prima del volo, si prega di consultare il manuale del produttore del drone.
Una volta completate tutte le configurazioni, è possibile procedere al volo con il drone.
Assicurarsi che:
- La registrazione dei dati grezzi su entrambe le unità Reach M2/M+ e Reach RS2/RS2+ o Reach RS+ è abilitata prima del volo.
- L'attivazione della fotocamera sia attiva. Attivare la fotocamera e controllare l'ultimo marcatore temporale nella schermata Controllo fotocamera in Impostazioni in Emlid Flow.
Al termine del volo, è possibile disabilitare la registrazione dei log. Prima di spegnere i dispositivi, attendere il completamento dell'elaborazione dei log.
In un secondo momento, è possibile scaricare i log dei dati grezzi sia dalla base che dal rover.
Come risultato della missione di mappatura con Reach, si otterrà il seguente set di dati:
- Log grezzo da una base
- Log grezzo da un rover
- Set di immagini da un drone
- Elenco dei GCP
Ora è possibile preparare il set di dati per l'ulteriore elaborazione.