Сonfiguración del kit Reach UAV para cartografía PPK
Esta guía explica cómo configurar sus receptores Reach para la cartografía PPK con UAV.
Le recomendamos que consulte el artículo Cómo funciona PPK antes de empezar.
Resumen
Para configurar el kit UAV Reach para la cartografía PPK, necesitarás lo siguiente:
- Base Reach RS2/RS2+ o Reach RS+
- Rover Reach M2/M+ con antena GNSS
- Adaptador de zapata (HSA) para una cámara
- Cualquier cámara que proporcione acceso a la zapata (por ejemplo, Sony, Canon, Nikon)
Reach RS+ no puede actuar como base para un rover Reach M2, ya que Reach M2 requiere correcciones multifrecuencia. Aun así, puede utilizar Reach RS2/RS2+ como base para Reach M+. Tenga en cuenta que en este caso no obtendrá todas las ventajas del receptor multibanda. Puede obtener más información sobre las diferencias entre los receptores multibanda y de banda única en el artículo Monobanda frente a multibanda.
Además, necesitará algunos Puntos de Control Terrestre (PCT). Para colocar el GCP, se necesitan una base y un rover, o se puede utilizar un receptor conectado a un NTRIP.
En esta guía, nos centramos principalmente en la parte de la integración del equipo GNSS. Sin embargo, también se necesita un UAV y un PC con una estación de control terrestre y software fotogramétrico. Existen dos requisitos principales para los UAV:
- La presencia o capacidad de instalar una cámara con un conector de zapata
- Funcionalidad que permite disparar la cámara: por la propia cámara o por el piloto automático
Configuración del hardware Reach M2/M
Conexión de Reach M2/M+ a una cámara mediante HSA
HSA permite a Reach M2/M+ grabar con precisión una marca de tiempo en cada momento en que la cámara hace una foto.
La cámara requiere disponer de una zapata para su integración con Reach M2/M+. Si utiliza DJI Mavic o Phantom que no proporciona acceso a la zapata, siempre puede seguir trabajando con GCP.
Para conectar Reach a una cámara con un adaptador de zapata, utiliza el cable JST-GH de 5 pines que viene con Reach M2/M+. Enchufe el conector de la zapata en la zapata de una cámara y el conector JST-GH en el puerto С1 del Reach M2/M+.


Disparo de la cámara
Dependiendo de su aplicación, hay varias formas de activar una cámara.
-
Activación a través de la cámara: Algunas cámaras disponen de una función Timelapse que permite tomar una foto a intervalos regulares. Si su cámara admite esta opción, le recomendamos que la utilice, ya que es la forma más sencilla y directa.
tipCada cámara utiliza puertos diferentes para el disparo. Puede ser un puerto USB o HDMI. Lea el manual de la cámara para saber cómo dispararla.
-
Activación por piloto automático: Existen varias opciones para disparar la cámara a través de los pilotos automáticos:
-
Activar el obturador de la cámara en las paradas: El piloto automático puede disparar el obturador cada vez que el dron alcanza una parada. Si utiliza un controlador de vuelo basado en ArduPilot, consulte la guía Control de la cámara en misiones automáticas de ArduPilot para obtener más información.
-
Activar el obturador de la cámara a intervalos regulares: Consulte la guía Configuración del obturador de la cámara de ArduPilot para obtener más información.
-
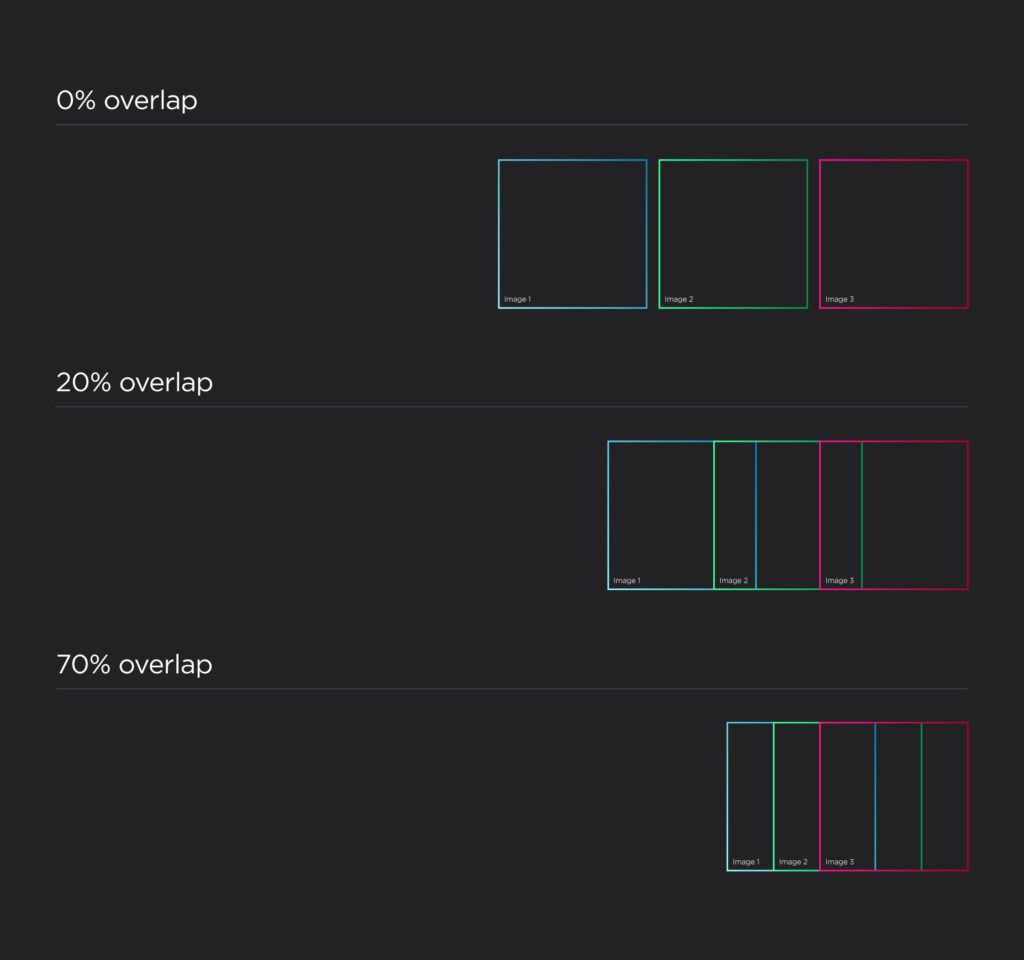
La mayoría de los programas informáticos de las estaciones de control en tierra permiten e incluso exigen la preparación de un plan de misión antes del vuelo. Es necesario configurar la cámara y el piloto automático para que obtenga imágenes con superposiciones. Esto es necesario porque se requieren puntos comunes en imágenes adyacentes para crear un mosaico ortogonal. Recomendamos que el solapamiento frontal sea como mínimo del 60 % y el lateral del 30 %.
Colocación de la antena
La antena GNSS debe colocarse en un plano de tierra. El plano de tierra de la antena debe ser conductor y de al menos 70 x 70 mm. Una placa metálica normal debería servir para este fin.
Las antenas helicoidales no necesitan plano de tierra. Aun así, un plano de tierra puede mejorar notablemente la calidad de la observación.
Consulte la guía Colocación de la antena para obtener más información.
Aislar Reach M2/M+ de posibles interferencias
En algunos casos, puede que necesites aislar su Reach para garantizar la mejor calidad de registro. La razón es que la potencia transmitida de las señales GNSS es bastante baja en relación con el posible ruido de otros componentes de hardware instalados en su UAV. Esto significa que la intensidad de la señal de la antena puede ser inestable e incluso a veces interrumpirse. La interrupción y la pérdida temporal de señal en el receptor RTK se denominan deslizamiento de ciclo.
Para evitar desviaciones de ciclo, recomendamos aislar la unidad Reach M2/M+ y conectarla a tierra para eliminar interferencias. Además, los componentes RC, como los transmisores de radio, también podrían afectar a la señal. Reach debe situarse lo más lejos posible de ellos.
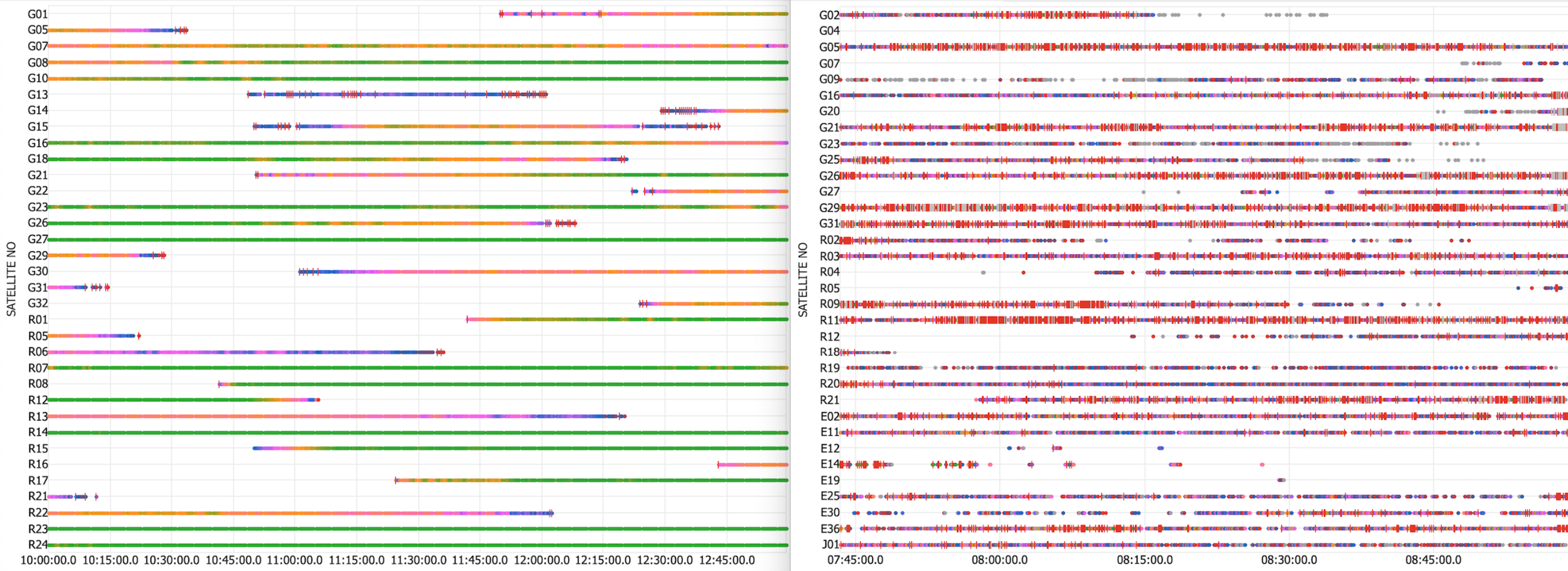
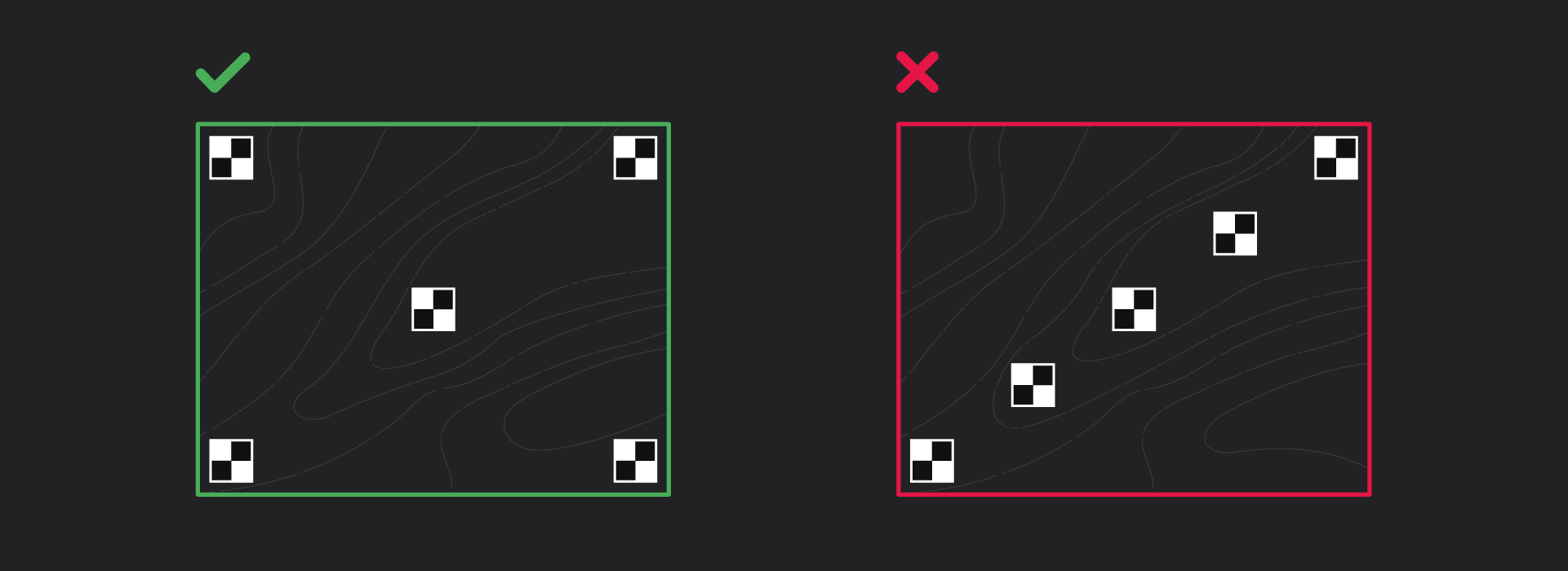
Los efectos de una mala configuración del hardware son considerables. La mala calidad de la señal, con valores de SNR bajos, y los numerosos saltos de ciclo plantean problemas a la hora de obtener soluciones fijas y marcas de tiempo perdidas. Eche un vistazo a las siguientes figuras que muestran ejemplos de buena (la imagen de la izquierda) y mala (la de la derecha) recepción por satélite.
Cree un tema en el Foro de la comunidad de Emlid en caso de que se encuentre con dificultades en esta fase.
Configuración básica Reach RS2/RS2+/RS
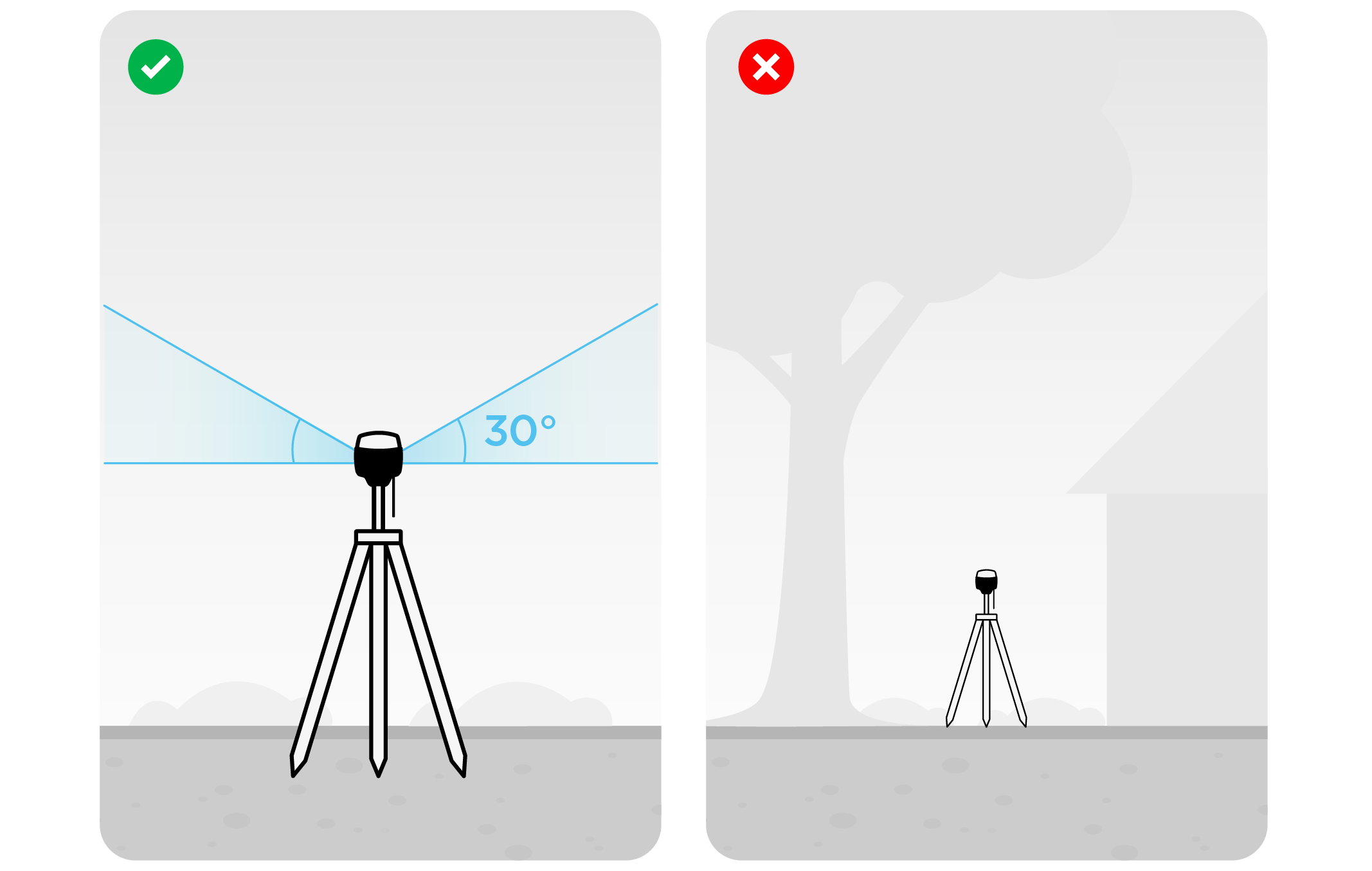
Consulte la figura siguiente y elija una ubicación adecuada para colocar la estación base Reach RS2/RS2+ o Reach RS+. Las reglas básicas son:
- Buen ángulo de cielo de más de 30 grados
- Lejos de árboles y edificios
- Sin electricidad cerca
Consulte la guía Colocación de la base para obtener más información.
Configuración de la base y el rover antes del vuelo
Configuración del rover Reach M2/M
-
Alimenta su Reach M2/M+ desde una fuente de alimentación externa o una batería de dron.
tipConsulta la guía Fuente de alimentación para obtener más información.
-
Acceda a Reach M2/M+ en Emlid Flow.
tipConsulte las guías Conectarse a Reach y Conectar Reach a Internet para obtener más información.
-
Vaya a la configuración RTK y configure una de las selecciones GNSS recomendadas y la tasa de actualización para el registro de marcas de tiempo:
- Reach M2
- Reach M+
Reach M2 rastrea los sistemas de satélites GPS, GLONASS, GALILEO, QZSS y BeiDou. Los datos pueden registrarse con una frecuencia de actualización de 1 Hz, 5 Hz o 10 Hz.
Para el vuelo de un dron, es mejor configurar la tasa de actualización a 10 Hz.
| Selección de GNSS | Tasas de actualización permitidas por Reach M+ |
|---|---|
| GPS + GLONASS + GALILEO + SBAS + QZSS | 1 Hz |
| GPS + GLONASS + QZSS | 5 Hz |
| GPS + GALILEO | 5 Hz |
| LLH | 10 Hz |
-
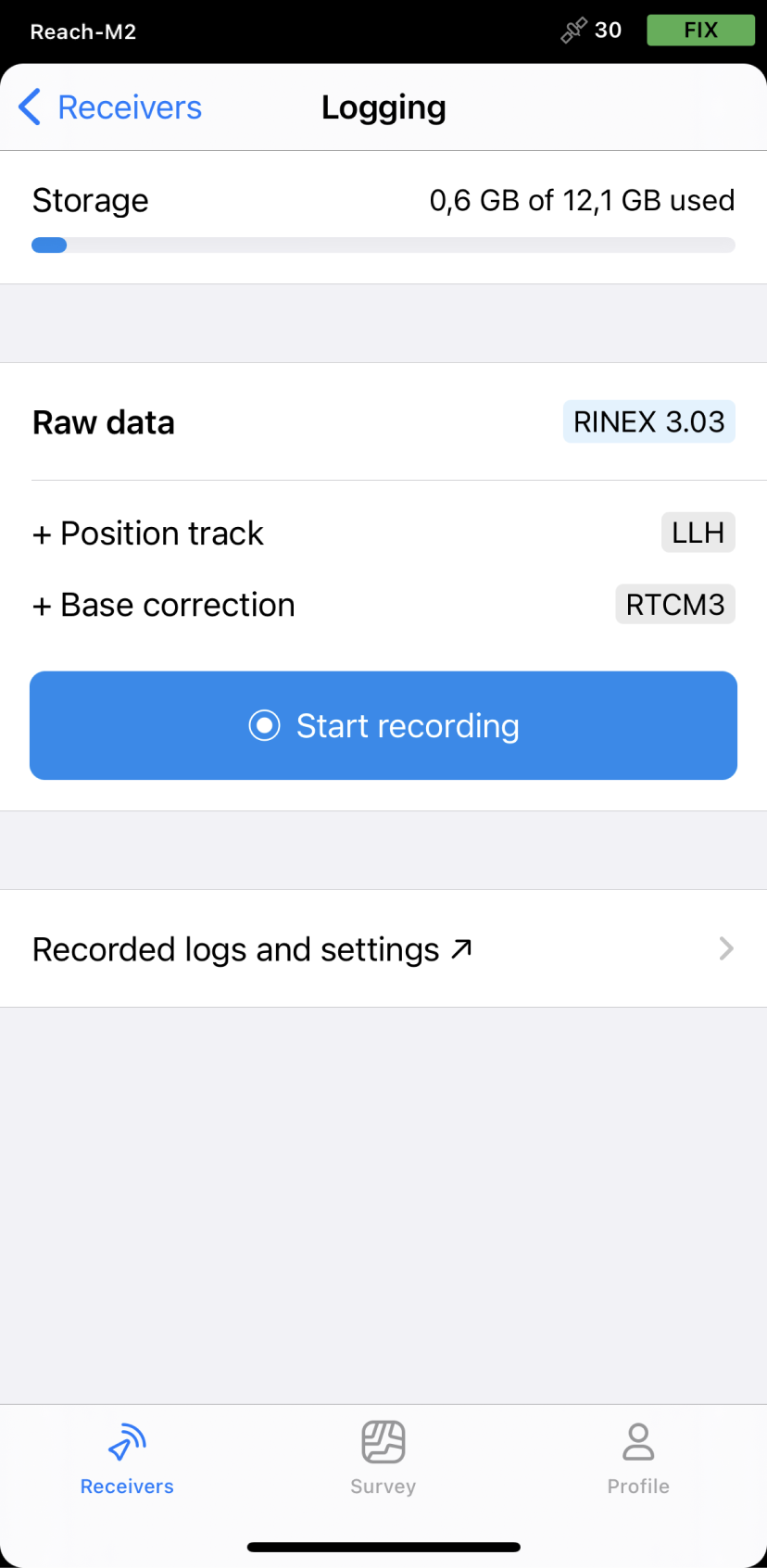
Activar el registro de datos sin procesar en la pantalla Registro:
Configuración de la base Reach RS2/RS2+/RS+
-
Encienda la unidad Reach RS2/RS2+ o Reach RS+.
-
Acceda al receptor en Emlid Flow.
-
Vaya a la pantalla Configuración de GNSS.
-
Elija el mismo GNSS que para Reach M2/M+ con una frecuencia de actualización GNSS de 1 Hz.
-
Habilite el registro de datos sin procesar en la pantalla Registro.
Colocación de puntos de control terrestre
Los puntos de control en tierra (PCT) son puntos con coordenadas conocidas sobre el terreno en la zona de su interés. Los PCT suelen ayudar a mejorar y comprobar la precisión, obtener la escala correcta y la orientación del mapa. Además, son necesarios para el posicionamiento absoluto de su mapa en relación con el mundo real que lo rodea.
Consulta la guía Colocación de la base para obtener más información sobre la precisión absoluta y relativa.
Reach proporciona coordenadas con precisión centimétrica en PPK. Además, si coloca la base sobre un punto de coordenadas conocidas, obtendrá las coordenadas con una precisión absoluta. En tal caso, los BPC pueden ayudarle a verificar la exactitud.
Los PCG deben ser claramente visibles en las imágenes del dron. Asegúrese de que la marca contrasta con el entorno y es lo suficientemente grande. Coloque un poste topográfico con un receptor exactamente en el centro de la marca para tomar sus coordenadas.
La cantidad suficiente de BPC depende de la superficie del emplazamiento. Suelen ser entre 5 y 10 puntos. Existen algunas reglas básicas para la colocación de puntos de control:
- Deben repartirse equitativamente en la zona donde se realice el levantamiento. Por ejemplo, si utiliza 5 puntos, establezca por uno para cada esquina y el último en el centro del área
- No deben estar en la misma línea
Además, es estupendo si tiene la posibilidad de colocar los GCP en los puntos más altos y más bajos del emplazamiento. Ayuda a realizar la proyección plana correcta.
Es importante cumplir estos requisitos si quiere obtener la misma precisión en toda la parcela.
Consulte la guía Colocación de los GCP para obtener más información.
Vuelo de levantamiento
No prestamos mucha atención a este paso debido a las diferencias en la configuración de vuelo del dron de un modelo a otro. Por favor, consulte el manual del fabricante de su dron antes del vuelo.
Una vez realizadas todas las configuraciones, puede proceder a volar con su dron.
Asegúrese de que el registro de datos sin procesar en las unidades Reach M2/M+ y Reach RS2/RS2+ o Reach RS+ está activado antes del vuelo.
- El registro de datos sin procesar en las unidades Reach M2/M+ y Reach RS2/RS2+ o Reach RS+ se activa antes del vuelo.
- El disparo de la cámara está activado. Dispare la cámara y compruebe la última marca de tiempo en la pantalla Control de la cámara en Configuración en Emlid Flow.
Una vez finalizado el vuelo, puede desactivar la grabación de los registros. Antes de apagar los dispositivos, espere a que finalice el procesamiento de los registros.
Más adelante podrá descargar los registros de datos sin procesar tanto de la base como del rover.
Como resultado de la misión de mapeo con Reach tendrá el siguiente conjunto de datos:
- Registro en bruto de una base
- Registro bruto de un rover
- Conjunto de imágenes desde un dron
- Lista de BPC
Ahora puede preparar el conjunto de datos para su posterior procesamiento.