Geoetiquetado de fotos con Emlid Studio
Para obtener más información sobre el posprocesamiento con nuestra aplicación de escritorio multiplataforma Emlid Studio, consulte nuestra documentación.
Esta guía le guía a través del proceso de geoetiquetado de las imágenes de drones en Emlid Studio que se utilizan para su posterior cartografiado en software de fotogrametría.
Resumen
Con la función PPK de datos de drones, puede añadir fácilmente geoetiquetas a los datos EXIF de las imágenes del dron y procesarlas posteriormente en el software de fotogrametría. Para realizar el geoetiquetado, se necesitan los registros de datos en bruto de la base y el rover, o un archivo POS listo con los eventos, e imágenes de drones. El proceso incluye dos pasos: procesamiento y geoetiquetado. Puede omitir el procesamiento y cargar sus propios archivos _events.pos para obtener fotos geoetiquetadas.
Primeros pasos
Para obtener más información, consulte el artículo Cómo funciona PPK.
Como resultado de la misión de mapeo, debería tener los siguientes archivos:
- Registro RINEX de una base
- Registro RINEX de un rover
- Conjunto de imágenes de la cámara del dron
- Archivo CSV Emlid Flow con las coordenadas de los puntos de control terrestre
Los datos RINEX se utilizarán para obtener coordenadas precisas para el geoetiquetado de las imágenes. El archivo CSV no es necesario en este paso, pero es esencial para el mapeo posterior en el software de fotogrametría.
Flujo de trabajo
Posprocesamiento
Si ya ha posprocesado los archivos RINEX de la base y del rover, y ha obtenido el archivo _events.pos, vaya directamente a la sección Geoetiquetado.
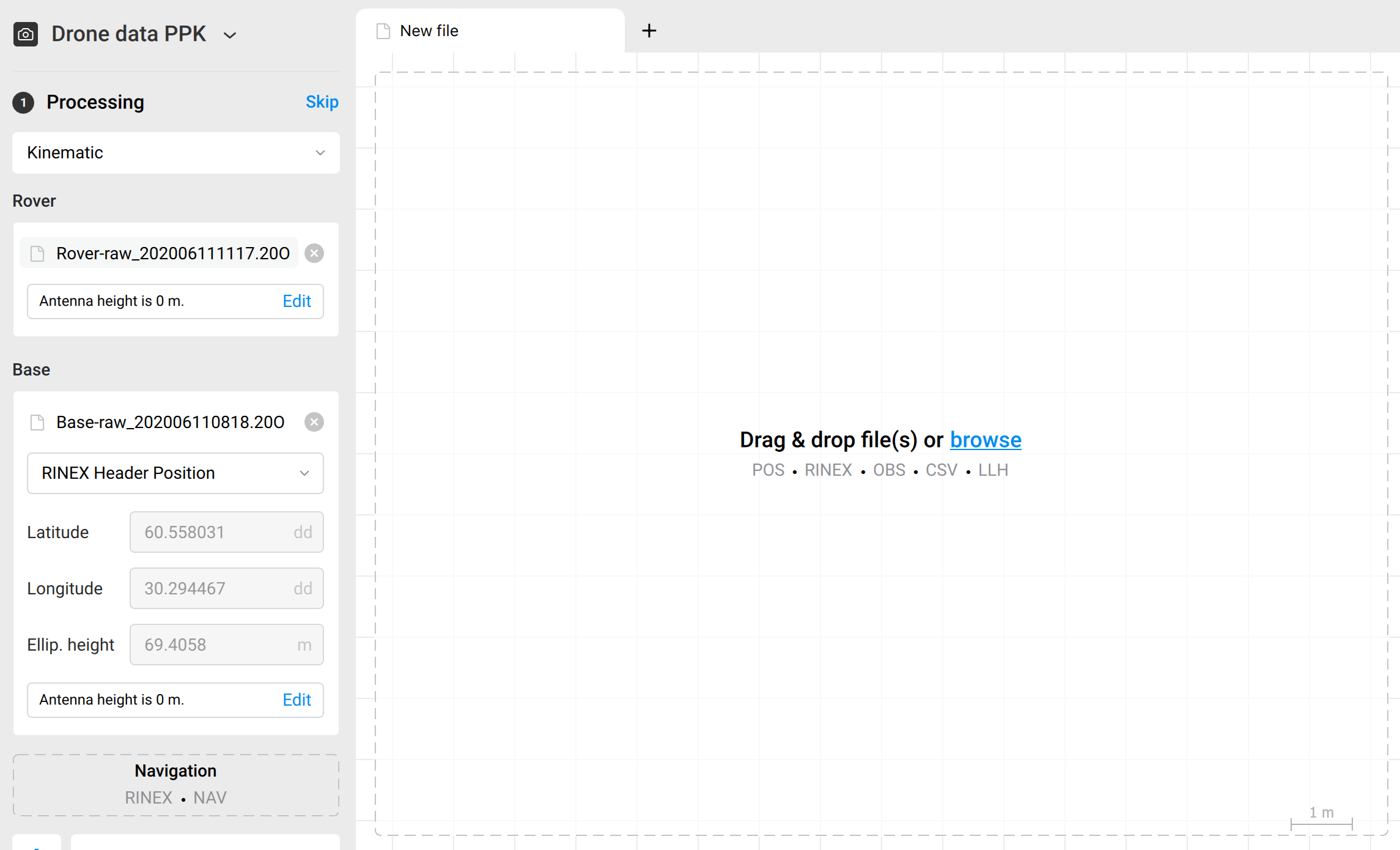
Para posprocesar los archivos de la base y el rover, siga los pasos que se indican a continuación:
-
Añada el archivo de observación RINEX del rover.
-
Ajuste la altura de la antena en metros.
tipRecomendamos dejar la altura de la antena a 0. Normalmente, el software de fotogrametría tiene la función de calcular el desplazamiento de la antena (posición del centro de la cámara respecto a la posición de la antena).
-
Añada el archivo de observación RINEX de la base.
-
Establezca las coordenadas base.
tipPor defecto, se utiliza la posición del encabezado RINEX. Si coloca su base sobre el punto con coordenadas conocidas, introduzca las coordenadas y la altura de la antena manualmente. De este modo, obtendrá una precisión absoluta.
-
Añada el archivo de navegación RINEX desde la base o el rover.
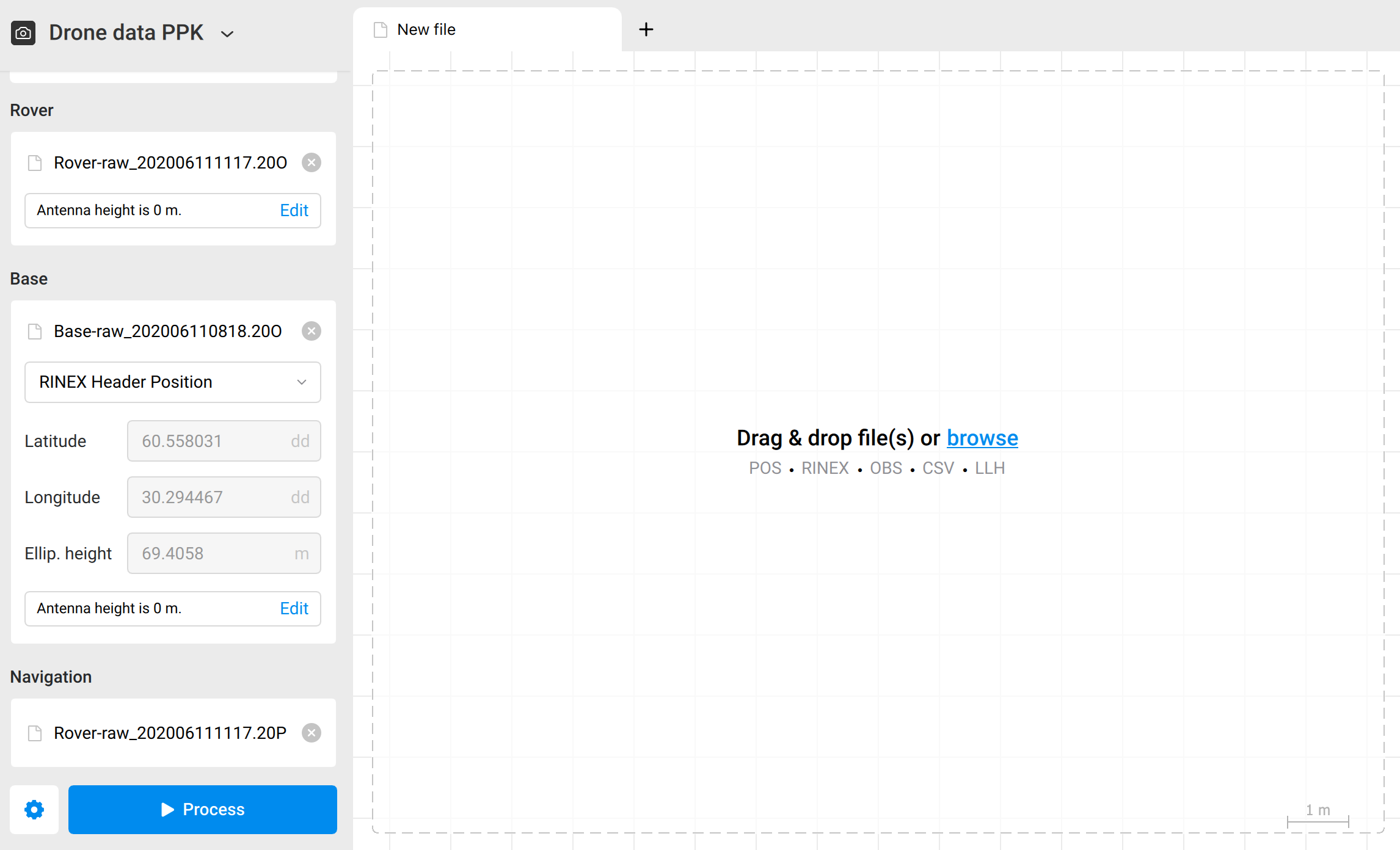
-
Haga clic en Procesar. Verá la barra de progreso en la esquina inferior izquierda.
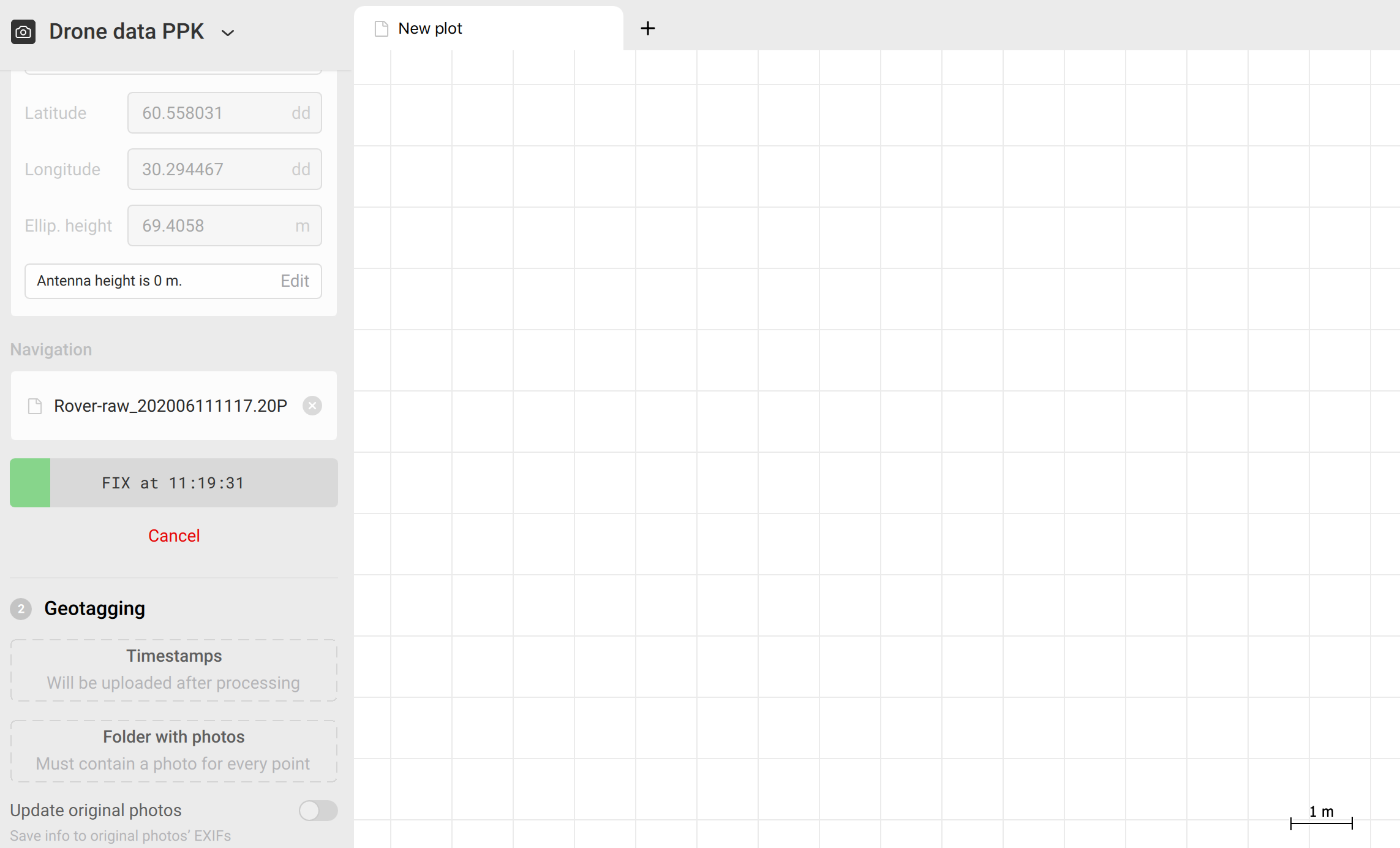
-
Una vez que el archivo .pos esté listo, Emlid Studio lo mostrará en el gráfico. El archivo _events.pos con las posiciones precisas de las fotos se añadirá automáticamente al campo Marcas de tiempo de la sección Geoetiequtado.
Geoetiquetado
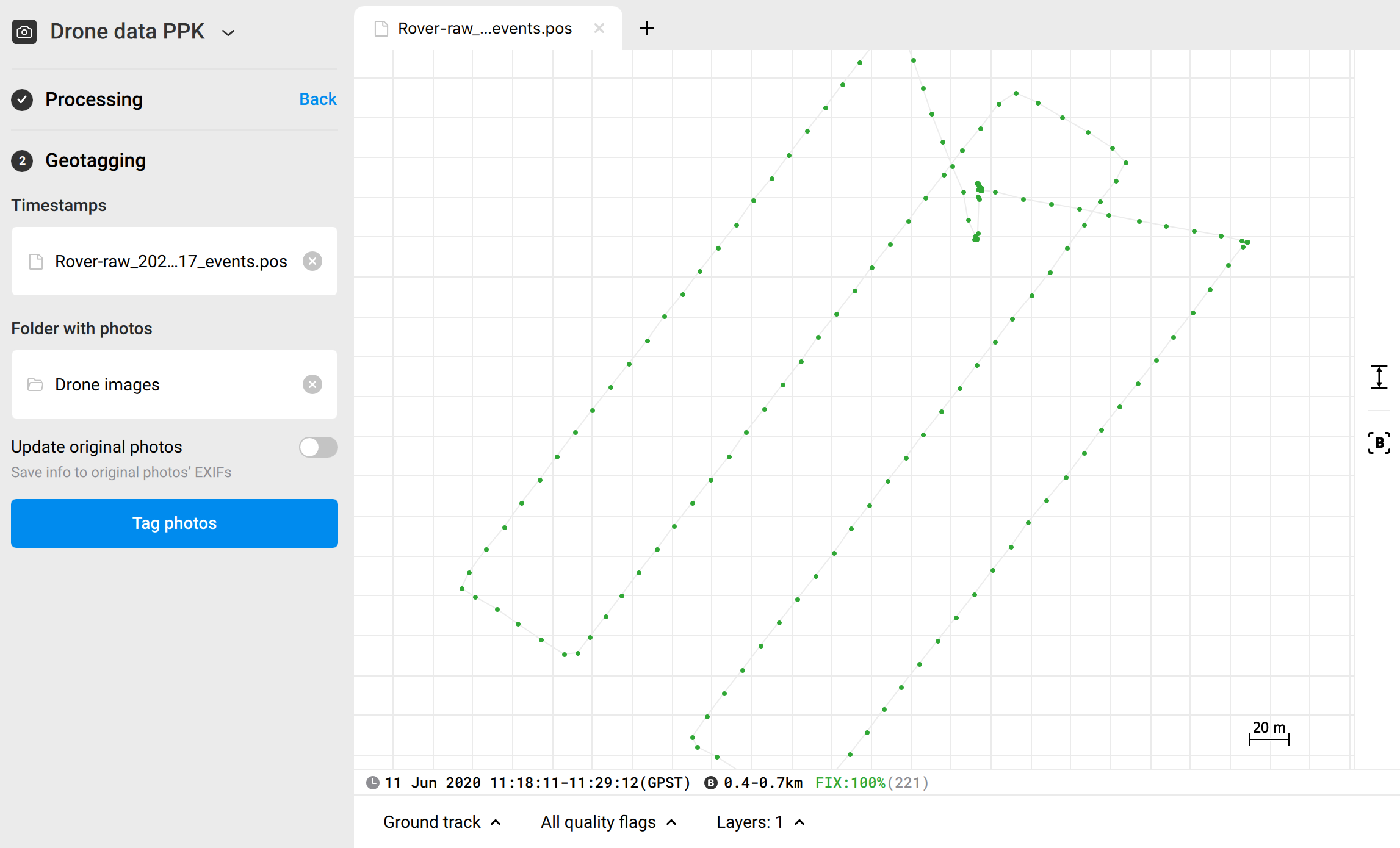
Si se ha saltado los pasos anteriores, deberá añadir el archivo _events.pos manualmente. Arrástrelo y suéltelo en el campo Marcas de tiempo.
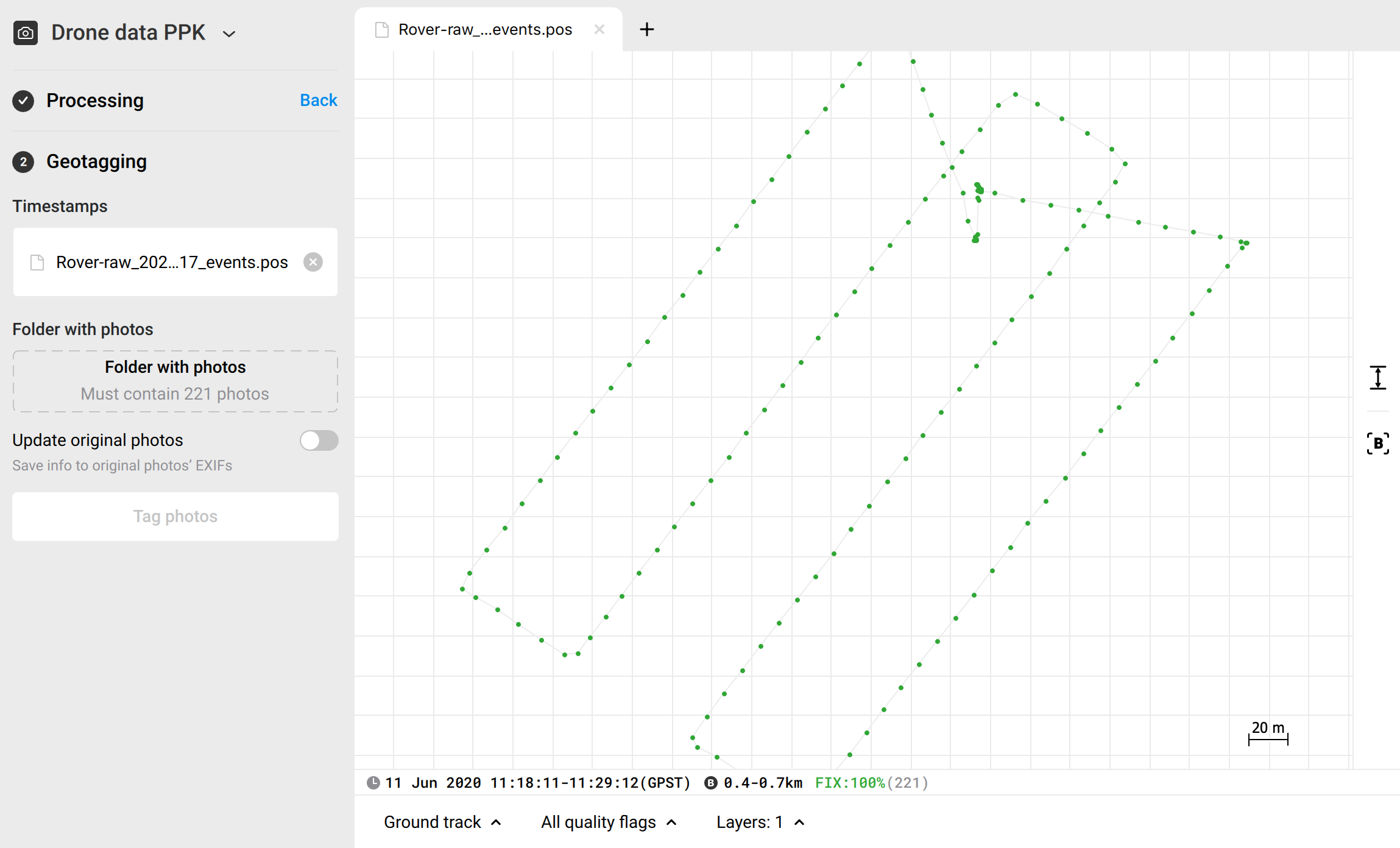
Para geoetiquetar sus fotos, siga los pasos que se indican a continuación:
-
Seleccione la carpeta que contiene las fotos de la cámara del dron.
noteEmlid Studio solo puede geoetiquetar fotos cuando el número de marcas de tiempo es igual al número de fotos.
tipSi desea actualizar las fotos originales con geoetiquetas, active Actualizar fotos originales. Por defecto, Emlid Studio crea copias geoetiquetadas de las fotos en una carpeta nueva.
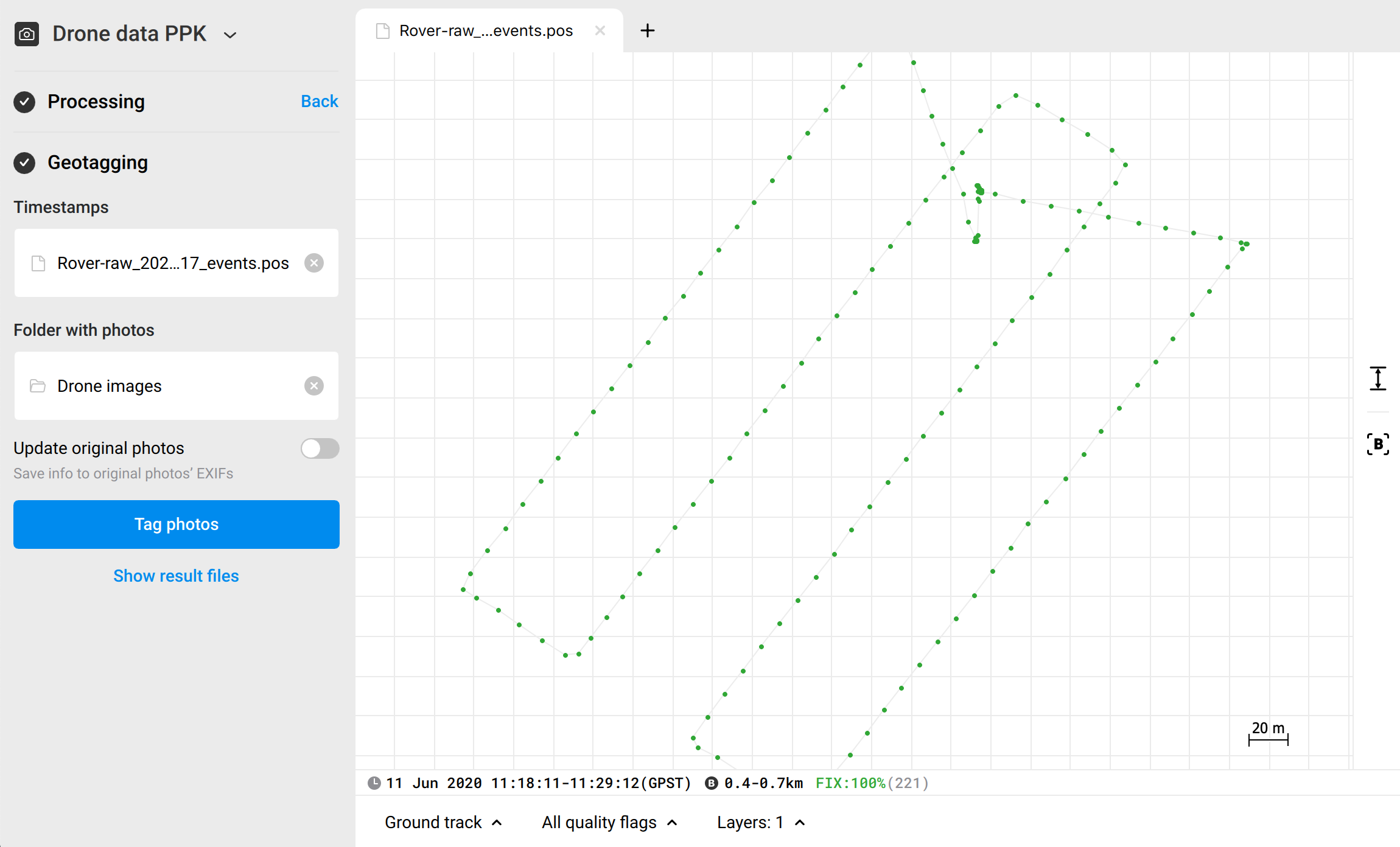
-
Haga clic en el botón Etiquetar fotos. Se iniciará el proceso de geoetiquetado. Cuando termine el procesamiento, puede hacer clic en Mostrar archivos de resultados para ver las fotos geoetiquetadas.
Una vez que tengas las fotos geoetiquetadas, puedes proceder a crear un mapa en el software de fotogrametría.
Para crear un mapa utilizando Pix4DMapper, consulte el tutorial Crear el mapa en Pix4DMapper.