Cómo funciona el PPK
Para obtener más información sobre el posprocesamiento con nuestra aplicación de escritorio multiplataforma Emlid Studio, consulte nuestra documentación.
PPK son las siglas de Post-Processed Kinematic (cinemática postprocesada).
Definiciones y diferencias con RTK
La cinemática postprocesada (PPK) es una alternativa a la cinemática en tiempo real (RTK). Con el flujo de trabajo PPK, el posicionamiento exacto no se produce en tiempo real, sino que todos los algoritmos se aplican a posteriori. Tanto la base en tierra como el rover (normalmente en un UAV) captan los registros GNSS en bruto, que luego se procesan para recibir una trayectoria de posicionamiento exacta.
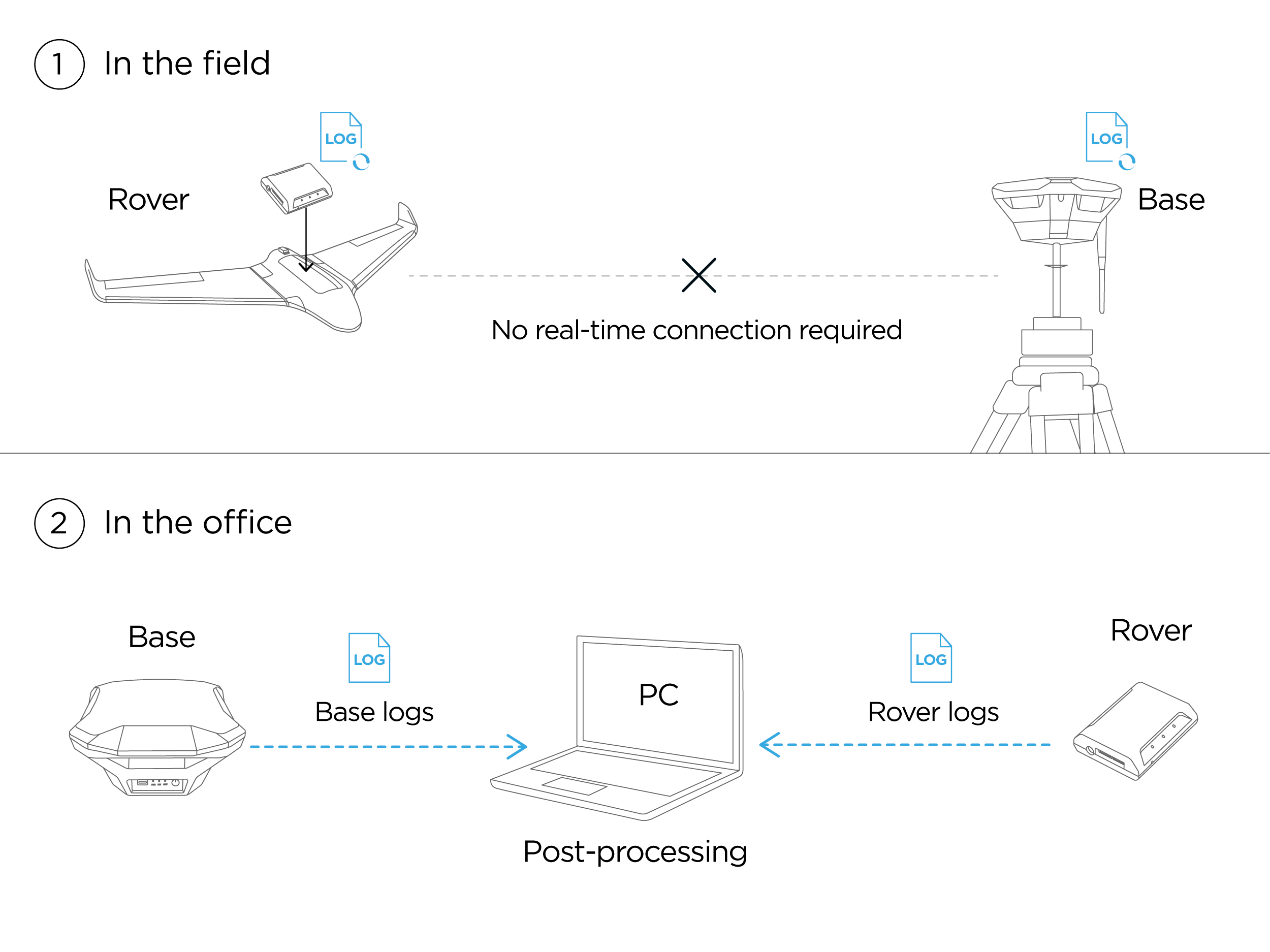
Aunque el PPK se utiliza principalmente en la cartografía con vehículos aéreos no tripulados (UAV), también puede utilizarse como respaldo del RTK para cualquier trabajo de topografía. El PPK ofrece un flujo de trabajo más flexible, que permite ejecutar el procesamiento varias veces utilizando diferentes configuraciones. Tampoco requiere un enlace de conexión entre la base y el rover, lo que simplifica la configuración del equipo.
PPK para cartografía con UAV
El uso del PPK para cartografiar con un dron tiene varias ventajas. El PPK no requiere la colocación de puntos de control en tierra (GCP), lo que permite inspeccionar zonas mucho más amplias. Es especialmente útil cuando hay que cartografiar grandes territorios o lugares con terreno difícil.
Para la cartografía del PPK, se recomienda tener unos cuantos GCP en el emplazamiento para la comprobación de los datos (puntos de control).
La parte más crítica del PPK para la cartografía con UAV es la sincronización de una cámara y el Reach, porque:
-
Siempre hay un retardo entre el disparo de la cámara y el momento en que se toma la foto.
-
Cuando un dron vuela a gran velocidad, el piloto automático solo recibe lecturas de posición cada varios metros. La exactitud de, por ejemplo, 2 metros no es suficiente para la topografía.
El Reach lo resuelve conectándose al obturador de la cámara a través de la zapata. La hora de cada foto se registra con una resolución inferior a un microsegundo. Durante el PPK recibes las coordenadas de los momentos exactos de cada foto tomada.
No es necesario integrar el Reach con el piloto automático para la cartografía con UAV.

Como resultado de la cartografía PPK con UAV con el Reach, tendrás un conjunto de imágenes y un archivo de texto que contiene una lista de coordenadas exactas correspondientes a cada foto. Estos datos se importan luego en programas de cartografía como Agisoft PhotoScan, DroneDeploy, Pix4d, etc.
No puedes integrar fácilmente el Reach con el DJI Mavic o Phantom, ya que sus cámaras no tienen zapata. Pero siempre puedes apoyar tu trabajo con GCPs, algo que es sencillo y eficaz para zonas pequeñas, como para tu dron DJI.