Geotagging Photos with Emlid Studio
To learn more about post-processing with our cross-platform desktop application Emlid Studio, check out our documentation.
This guide walks you through the process of geotagging of the drone images in Emlid Studio that are used for further mapping in photogrammetry software.
Overview
With the Drone data PPK feature, you can easily add geotags to the drone images' EXIF data and process them later in the photogrammetry software. To perform geotagging, you need raw data logs from the base and the rover, or a ready POS file with the events, and drone images. The process includes two steps: processing and geotagging. You can skip processing and upload your own _events.pos files to obtain geotagged photos.
Getting started
To learn more, check out the How PPK works article.
As a result of the mapping mission, you should have the following files:
- RINEX log from a base
- RINEX log from a rover
- Set of images from the drone's camera
- Emlid Flow CSV file with the coordinates of ground control points
The RINEX data will be used to get precise coordinates for the image geotagging. The CSV file is not needed at this step, but it's essential for further mapping in photogrammetry software.
Workflow
Post-processing
If you already post-processed RINEX files from the base and the rover and obtained the _events.pos file, go straight to the Geotagging section.
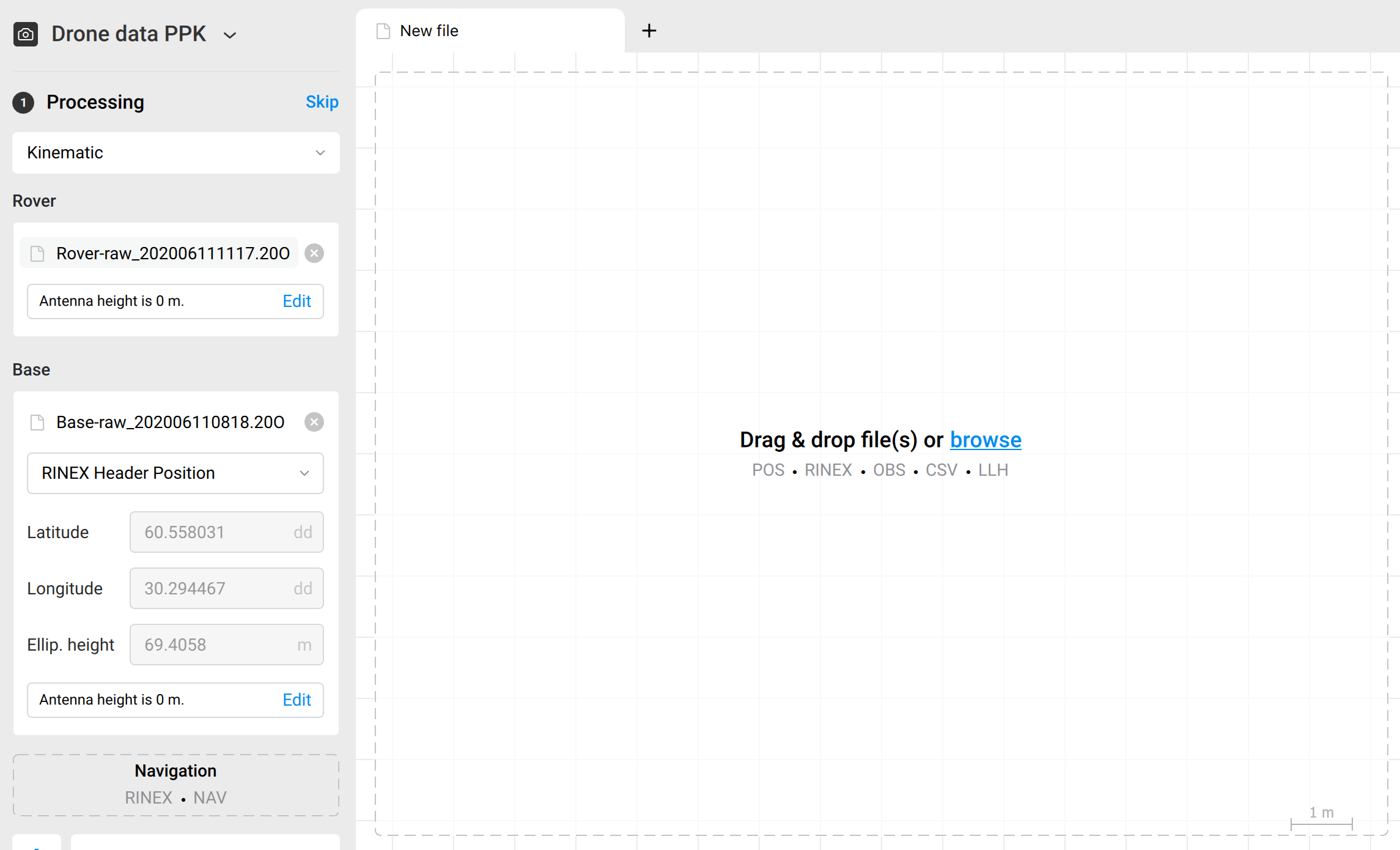
To post-process the files from the base and the rover, follow the steps below:
-
Add the RINEX observation file from the rover.
-
Set the antenna height in meters.
tipWe recommend leaving antenna height to 0. Usually, photogrammetry software has the feature of calculating the antenna offset (camera center position relative to the antenna position).
-
Add the RINEX observation file from the base.
-
Set the base coordinates.
tipBy default, the RINEX Header Position is used. If you place your base over the point with known coordinates, enter the coordinates and the antenna height manually. This way, you will obtain absolute accuracy.
-
Add the RINEX navigation file from the base or the rover.
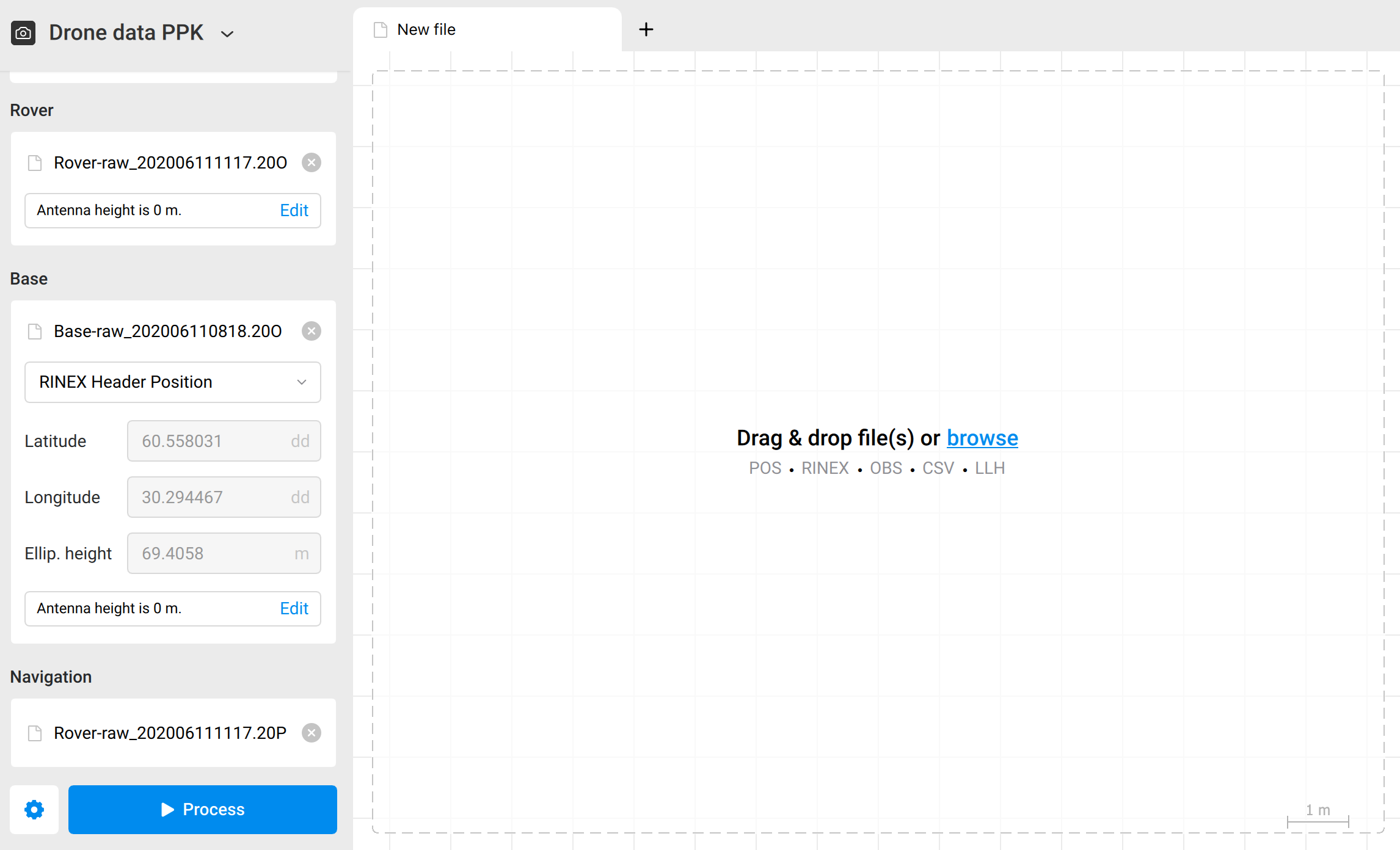
-
Click Process. You will see the progress bar in the bottom left corner.
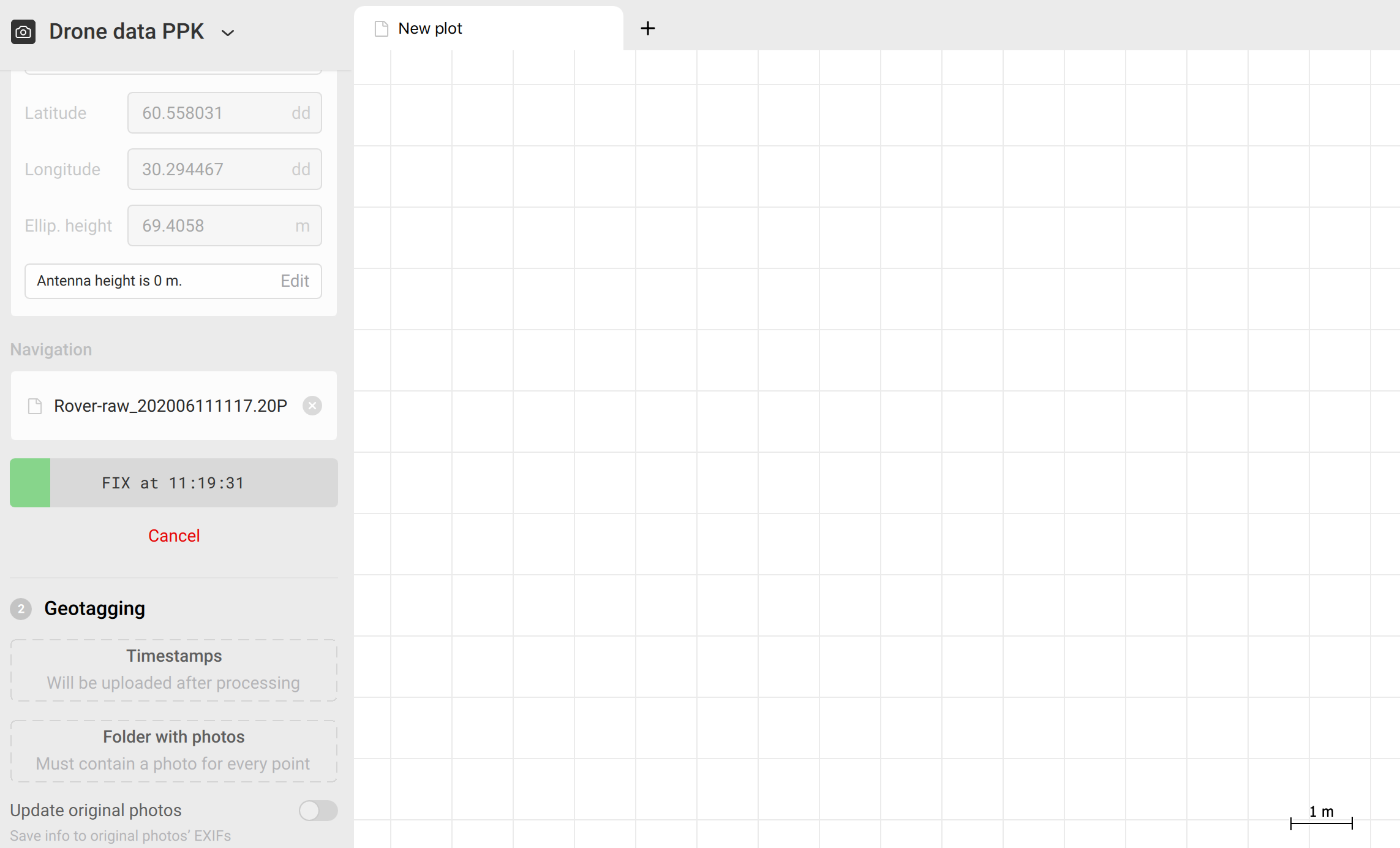
-
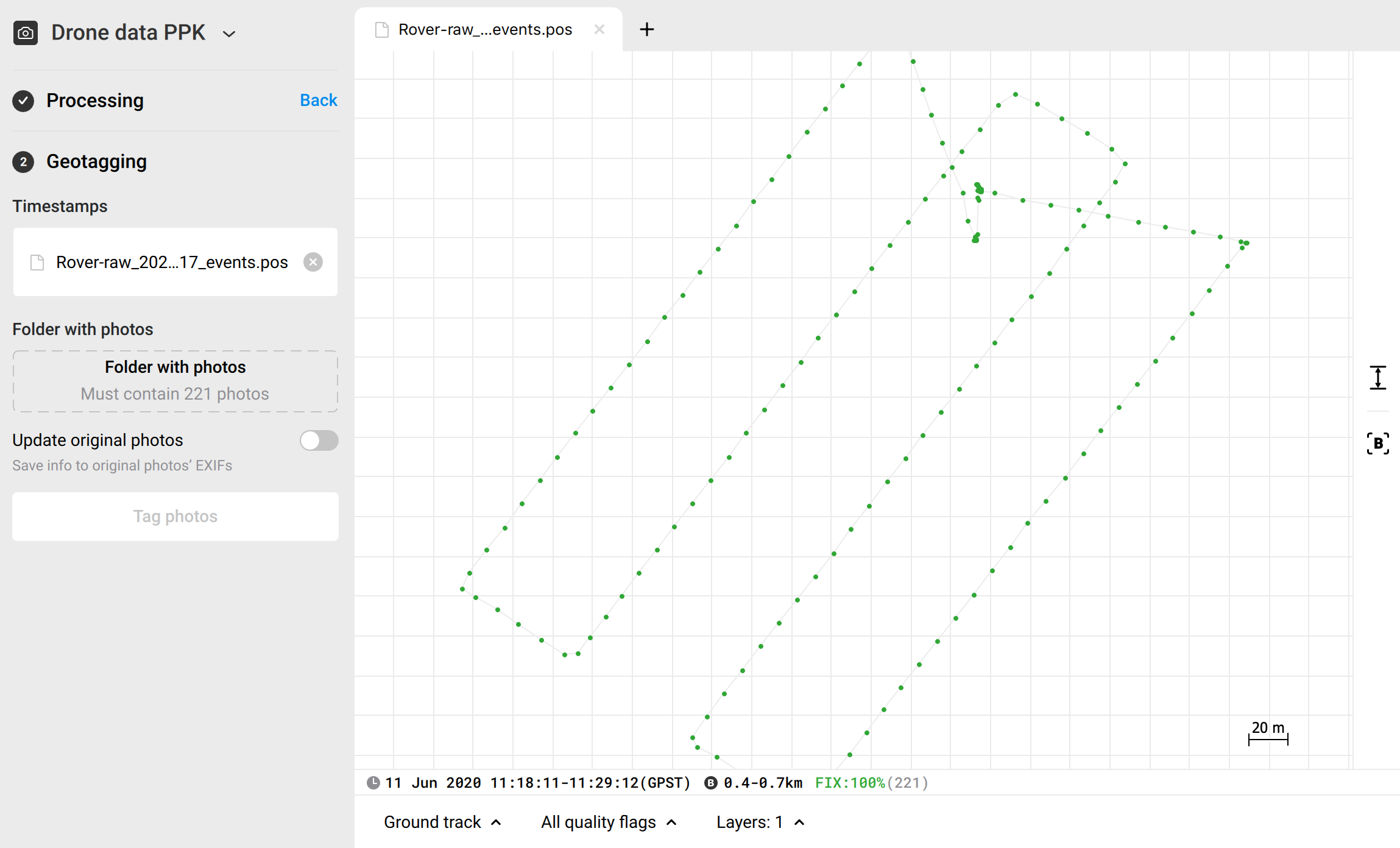
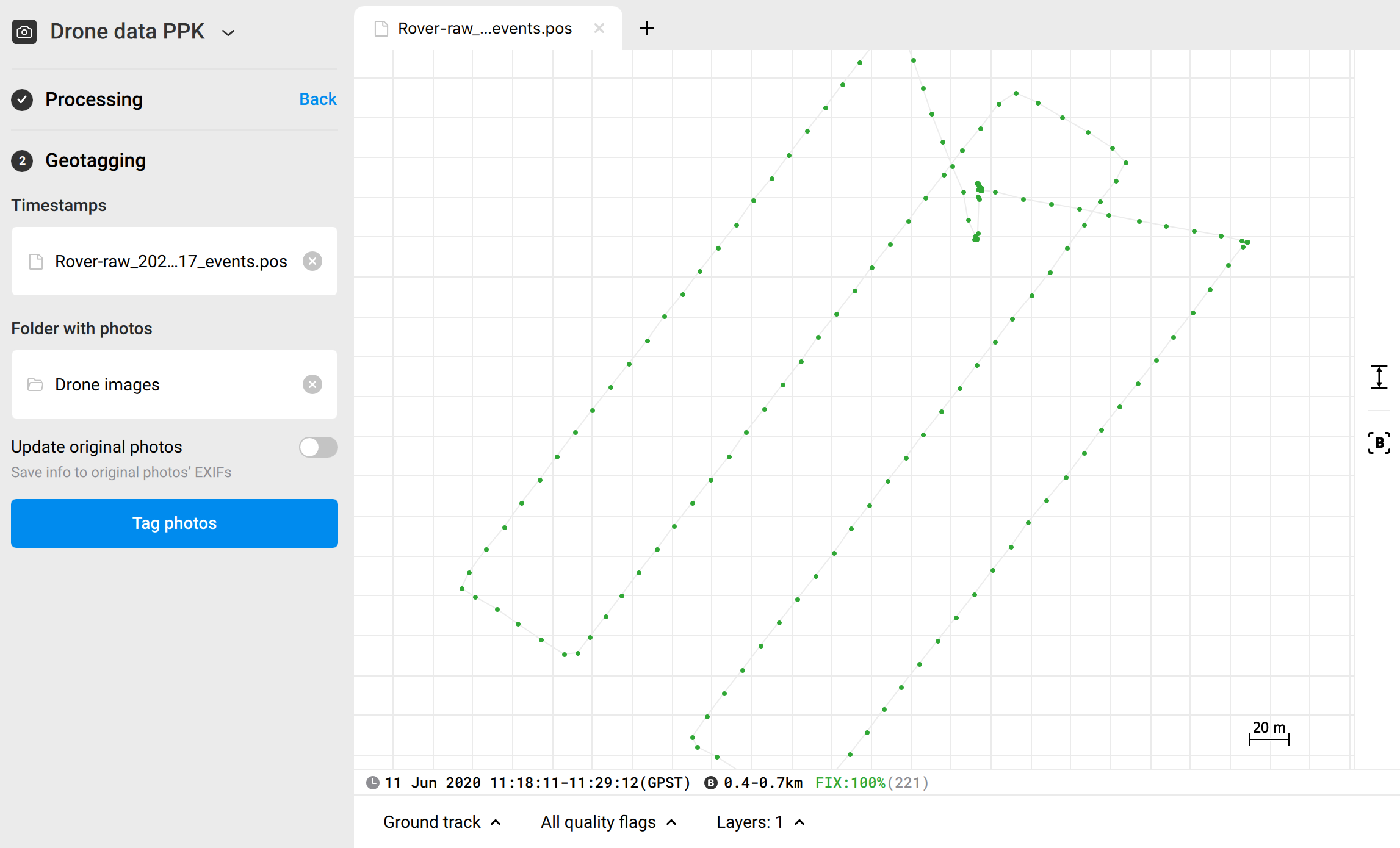
Once the .pos file is ready, Emlid Studio will show it on the plot. The _events.pos file with the precise photos' positions will be automatically added to the Timestamps field in the Geotagging section.
Geotagging
If you skipped the steps above, you need to add the _events.pos file manually. Drag and drop it to the Timestamps field.
To geotag your photos, follow the steps below:
-
Select the folder that contains the photos from the drone's camera.
noteEmlid Studio can only geotag photos when the number of timestamps is equal to the number of photos.
tipIf you want to update the original photos with geotags, toggle Update original photos. By default, Emlid Studio creates geotagged copies of the photos in a new folder.
-
Click on the Tag photos button. The geotagging process will start. When the processing is over, you can click on Show result files to see the geotagged photos.
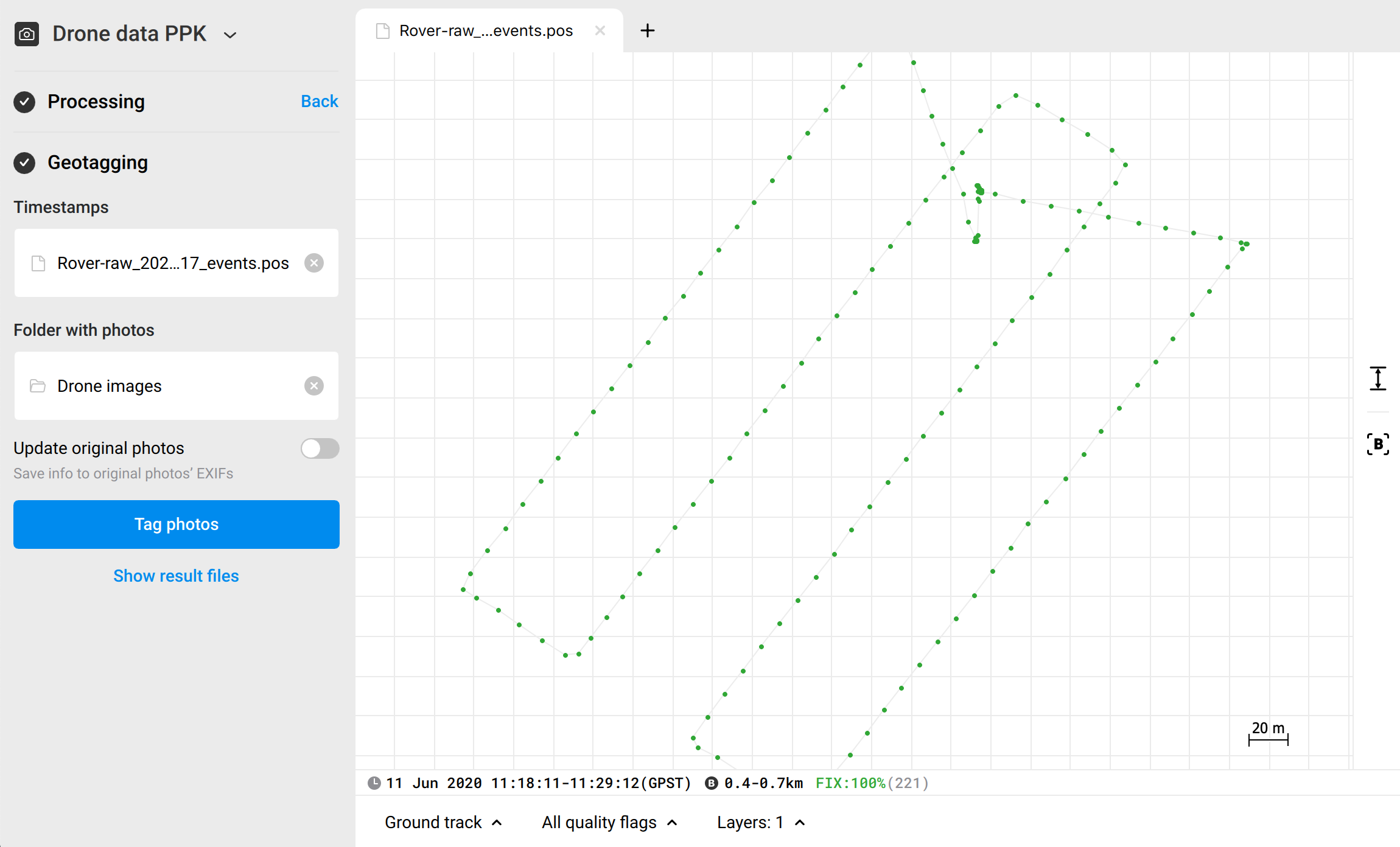
Once you have the geotagged photos, you can proceed with creating a map in the photogrammetry software.
To create a map using Pix4DMapper, check the Creating the map in Pix4DMapper tutorial.