Reach integration
Reach supports RTK-enhanced coordinates output to Edge flight controller using ERB (Emlid Reach Binary protocol).
Protocol description is available here.
Requirements
ERB support is included to ArduPilot starting with the following versions:
- ArduCopter 3.4
- ArduPlane 3.5.0
- APMrover 3.1
Recommended setup
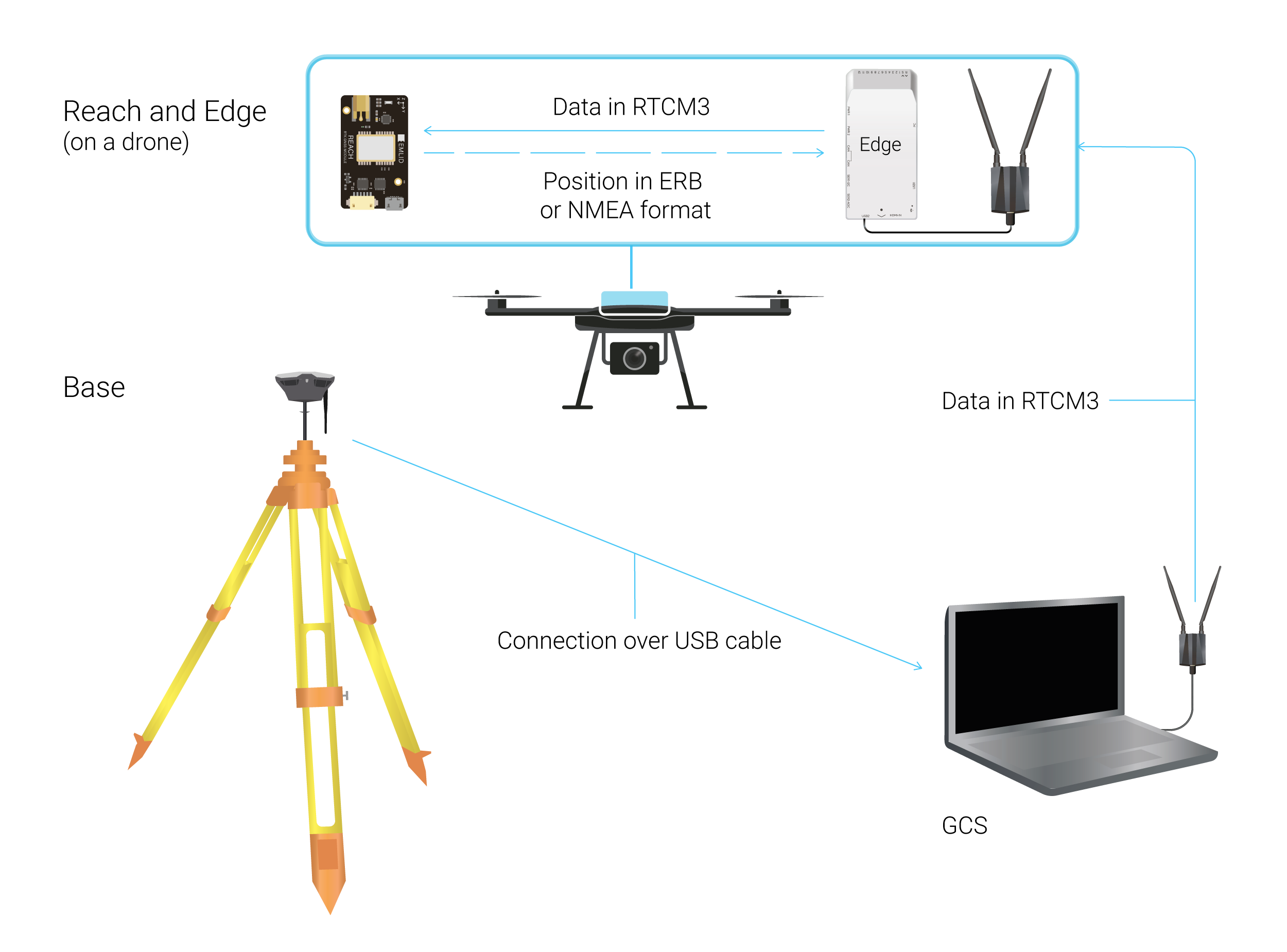
The setup we recommend goes as follows:
- Edge with Emlid Edge image (v1.3 or higher)
- Base station is a Reach or Reach RS unit connected to PC via USB
- GCS is a laptop with QGroundControl (v3.2.4-edge-2.2 or higher)
- Alfa Wi-Fi adapter is plugged in the laptop and connected to Edge's Wi-Fi network
- Rover Reach unit is mounted on a drone and connected to Edge via the GST-to-DF13 wire. This connection type will solve three problems at once: power Reach, allow ArduPilot to pass base corrections and allow Reach to pass RTK solution back.
The following guide will show how to configure both Edge and Reach to work in this setup. If you wish alter to this workflow, it should be fairly easy to do so, as every part of the system is independent of others.
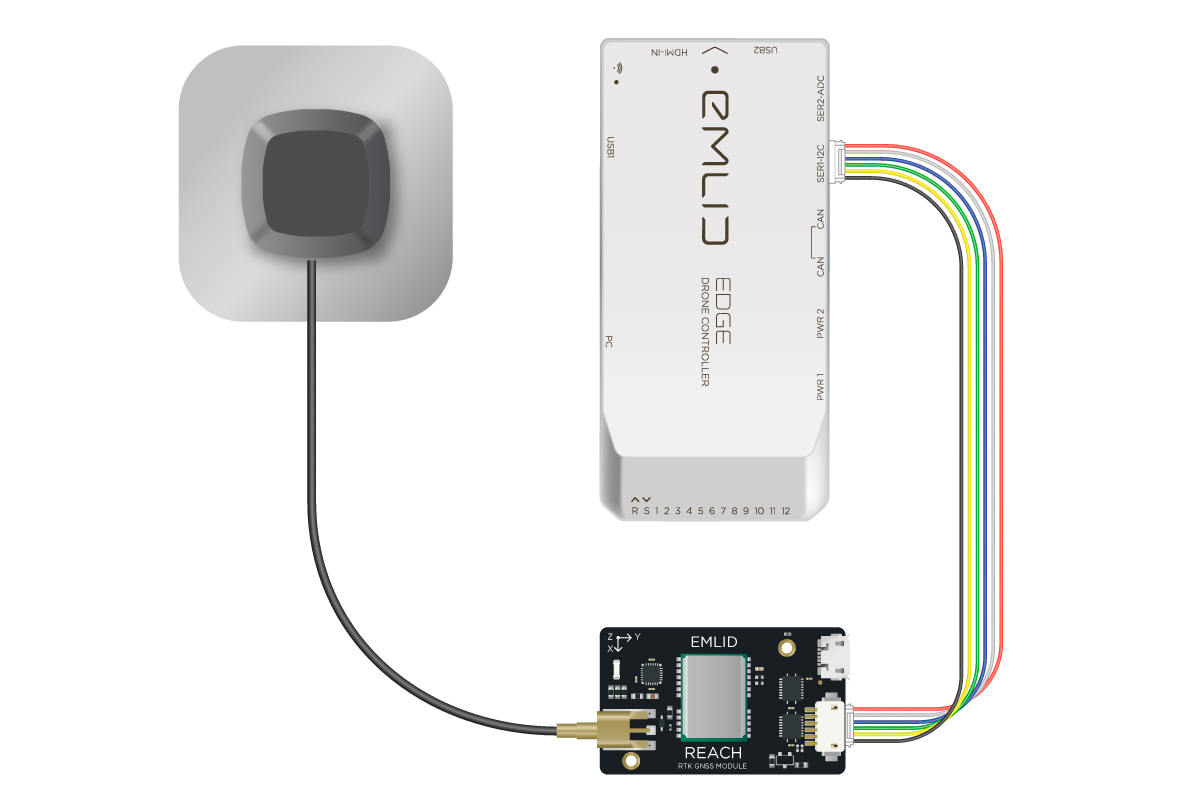
Connecting Reach to Edge
Connect Reach's upper DF13 port with Edge's SER1-I2C port.
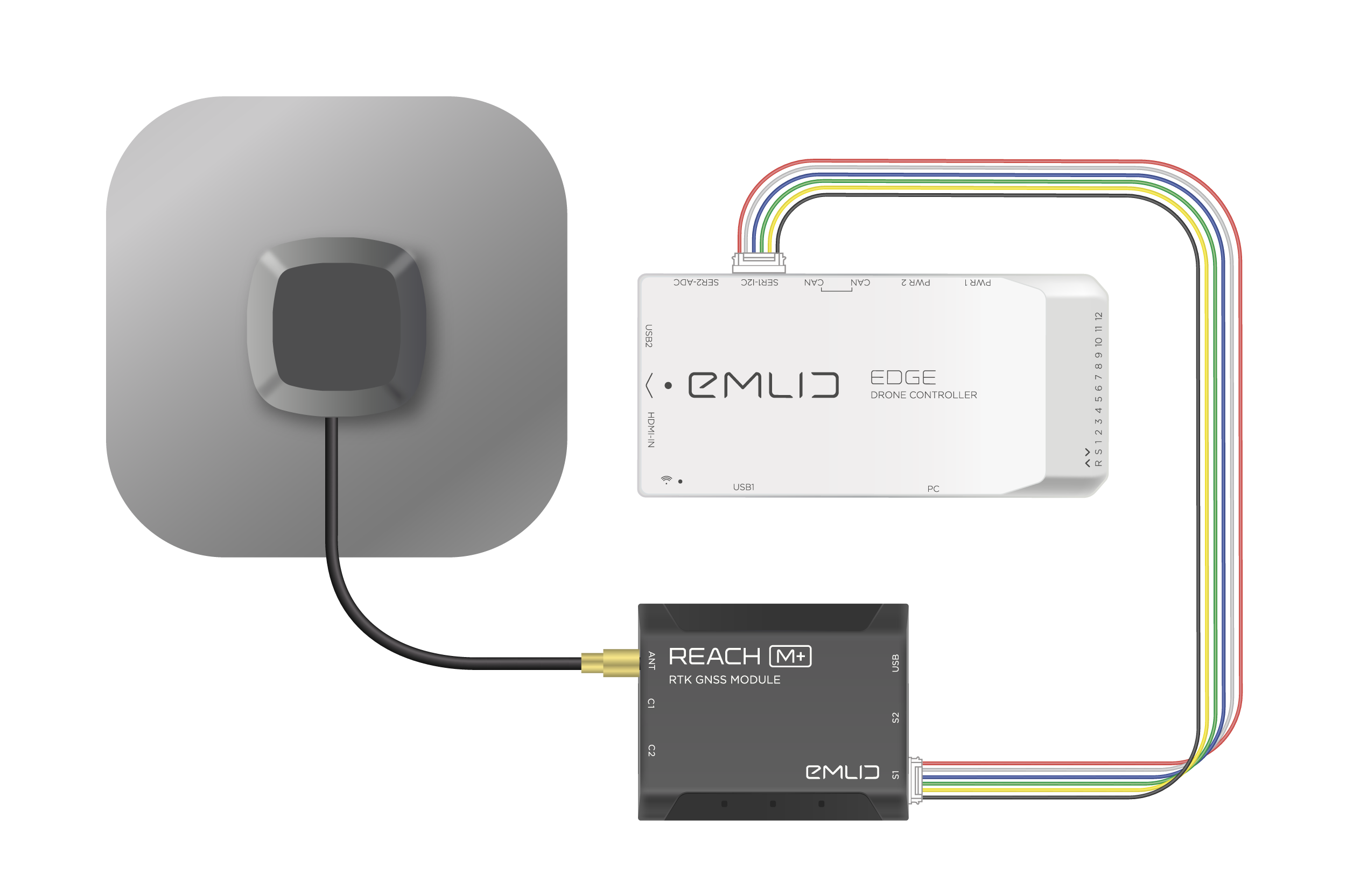
Connecting Reach M+ to Edge
Connect Reach's JST-GH port with Edge's SER1-I2C port.
Configuring Reach to work with Edge
Base setup
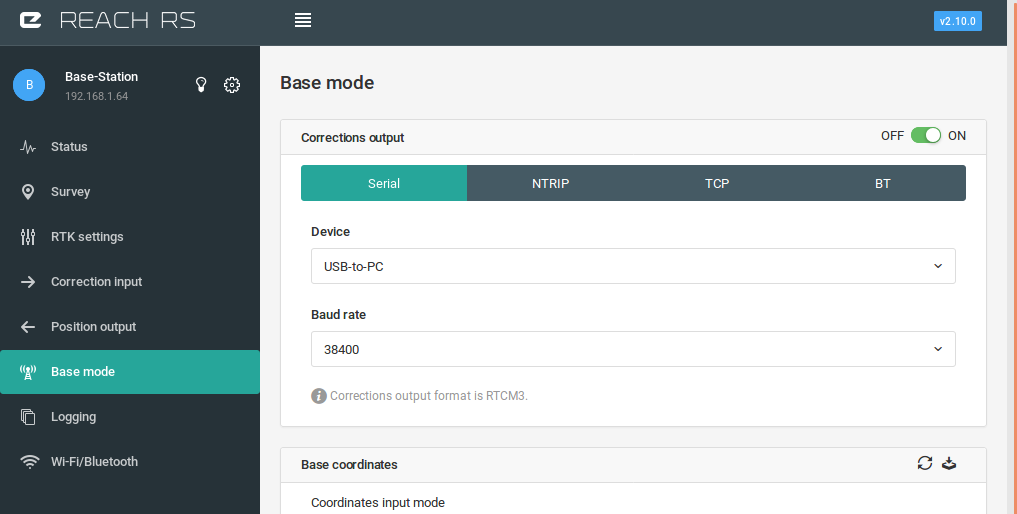
Configure Base mode
- Select
Serialconnection type - Select
USB-to-PCdevice - Choose the desired baud rate (38400 for default)
- Hit
Applybutton to save settings
Connect base Reach to PC via USB-microUSB cable.
Rover setup
note
The serial connection is used to accept base corrections and send solution at the same time.
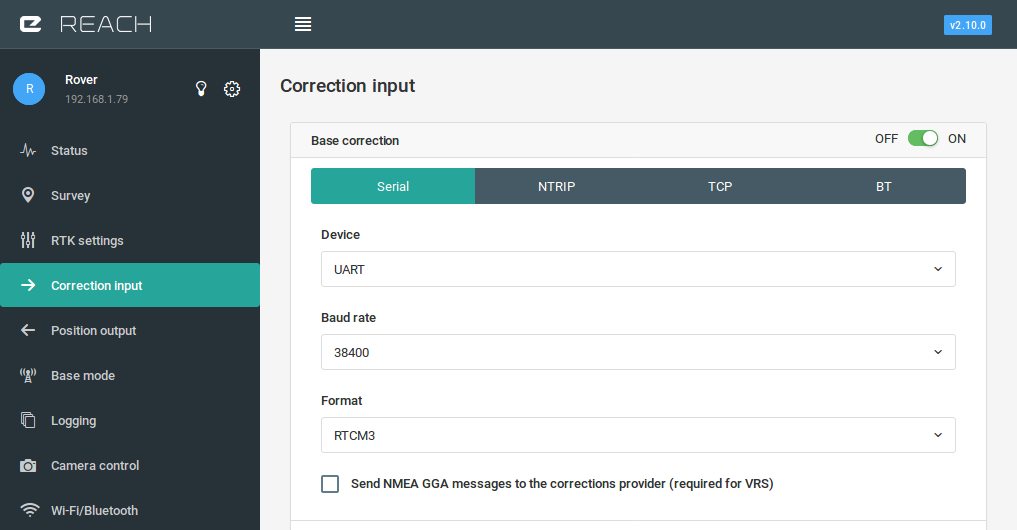
Start with configuration base correction input:
- Select
Correction inputtab - Select
Serial - Choose
UARTas the device - Choose the desired baud rate (38400 for default)
- Choose
RTCM3as base corrections format - Hit
Applybutton to save settings
Now configure position output:
- Select
Position outputtab - Select
Serial - Choose
UARTas the device - Choose the desired baud rate (38400 for default)
- Choose
ERBas position output format - Hit
Applybutton to save settings
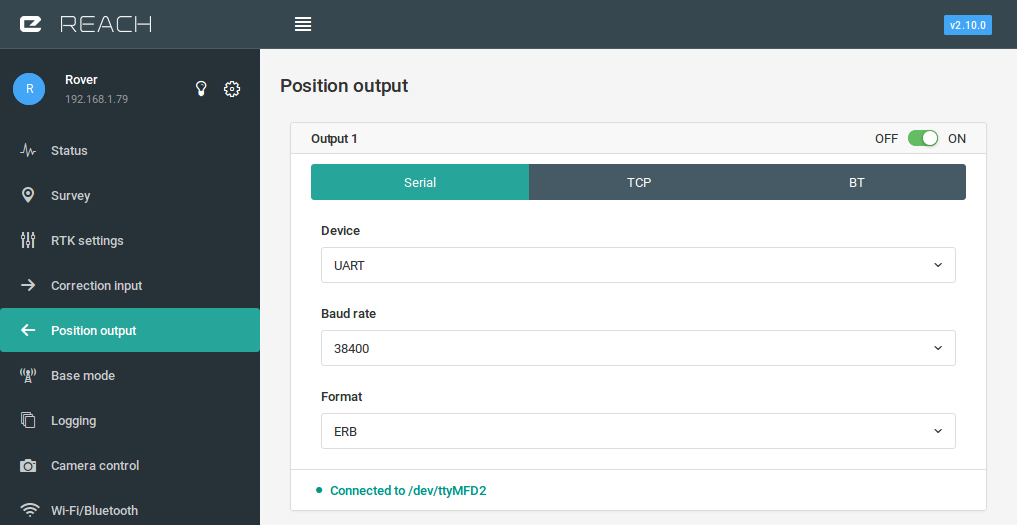
note
ERB is a custom protocol, used to send location data to the autopilot.
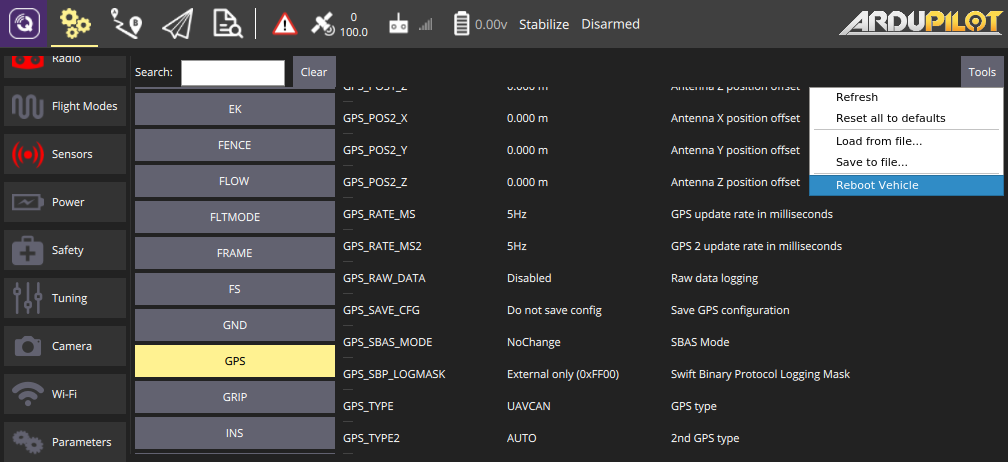
Configuring ArduPilot to accept Reach solution
ArduPilot configuration will require setting GPS parameters via QGroundControl:
- Open QGroundControl
- Go to
Vehicle Setupmenu - Open
Parameterslist on the left.
tip
To find the desired parameter more quickly, use a search box on top of the list.
- Set GPS_TYPE2 parameter to "AUTO". This will enable the second GPS input.
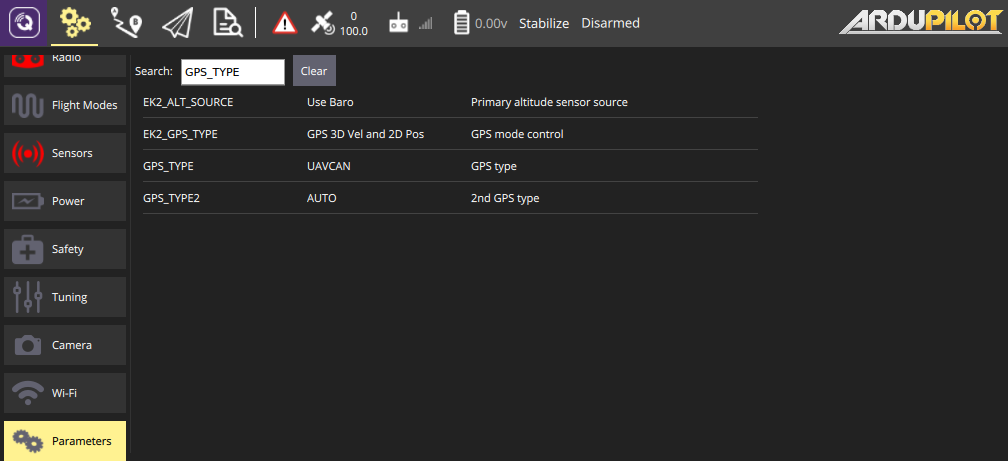
- Then press
Toolsbutton on the left upper corner and selectReboot Vehicle
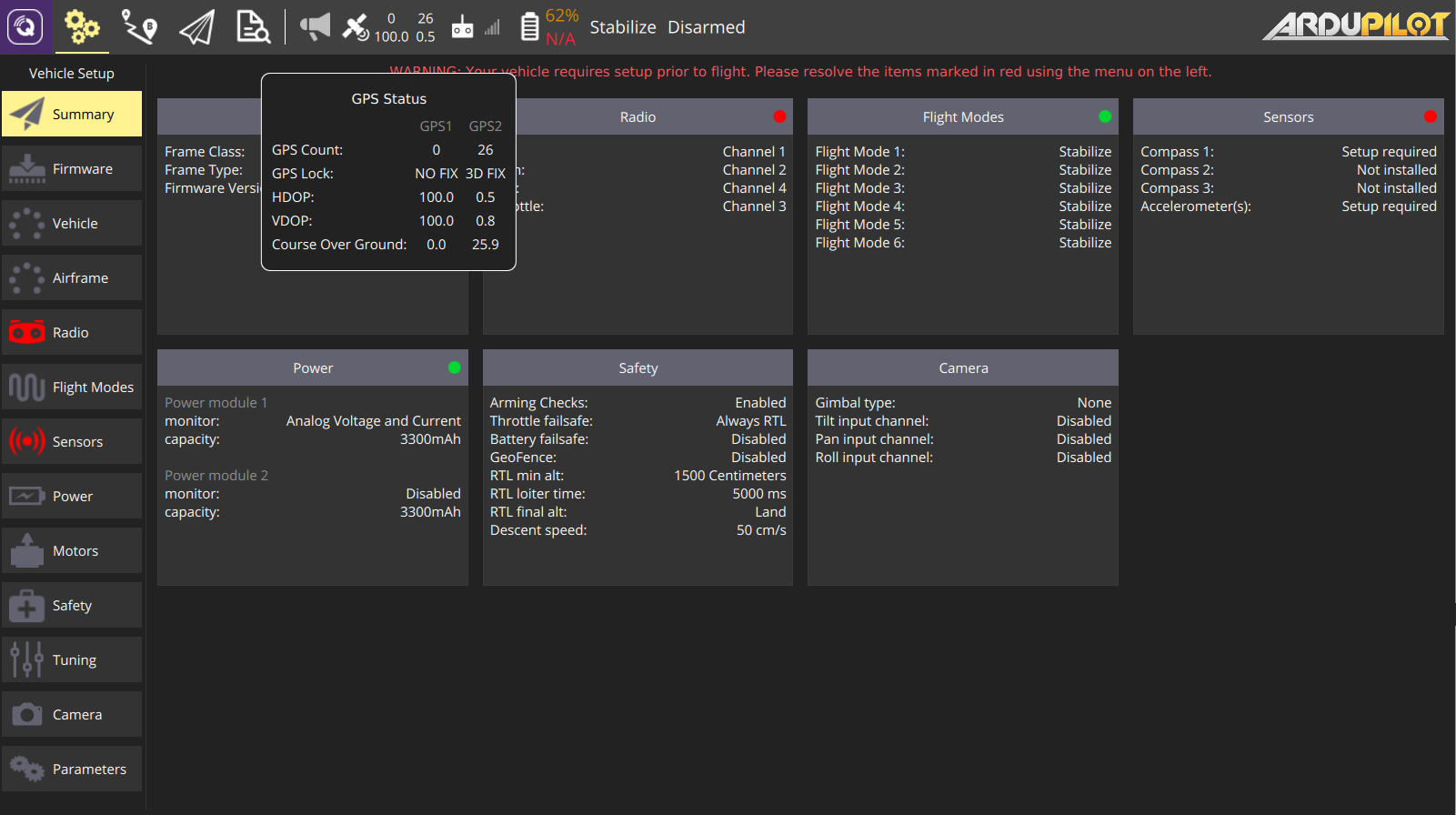
After everything is done vehicle GPS switches to RTK mode. The new mode is displayed in the GPS status icon