Géolocalisation des photos avec Emlid Studio
Pour en savoir plus sur le post-traitement avec notre application de bureau multiplateforme Emlid Studio, consultez notre documentation.
Ce guide vous accompagne dans le processus de géolocalisation des images de drone dans Emlid Studio, qui sont utilisées pour la cartographie ultérieure dans le logiciel de photogrammétrie.
Vue d'ensemble
Avec la fonctionnalité PPK des données de drone, vous pouvez facilement ajouter des géolocalisations aux données EXIF des images de drone et les traiter ensuite dans le logiciel de photogrammétrie. Pour effectuer la géolocalisation, vous avez besoin de journaux de données brutes de la base et du rover, ou d'un fichier POS prêt avec les événements, et d'images de drone. Le processus comprend deux étapes : le traitement et la géolocalisation. Vous pouvez ignorer le traitement et téléverser vos propres fichiers _events.pos pour obtenir des photos géolocalisées.
Démarrer
Pour en savoir plus, consultez l'article Comment fonctionne le PPK.
À la suite de la mission de cartographie, vous devriez avoir les fichiers suivants :
- Journal RINEX d'une base
- Journal RINEX d'un rover
- Ensemble d'images de la caméra du drone
- Fichier CSV Emlid Flow avec les coordonnées des points de contrôle au sol
Les données RINEX seront utilisées pour obtenir des coordonnées précises pour la géolocalisation des images. Le fichier CSV n'est pas nécessaire à cette étape, mais il est essentiel pour la cartographie ultérieure dans le logiciel de photogrammétrie.
Flux de travail
Post-traitement
Si vous avez déjà post-traité les fichiers RINEX de la base et du rover et obtenu le fichier _events.pos, passez directement à la section Géolocalisation ci-dessous.
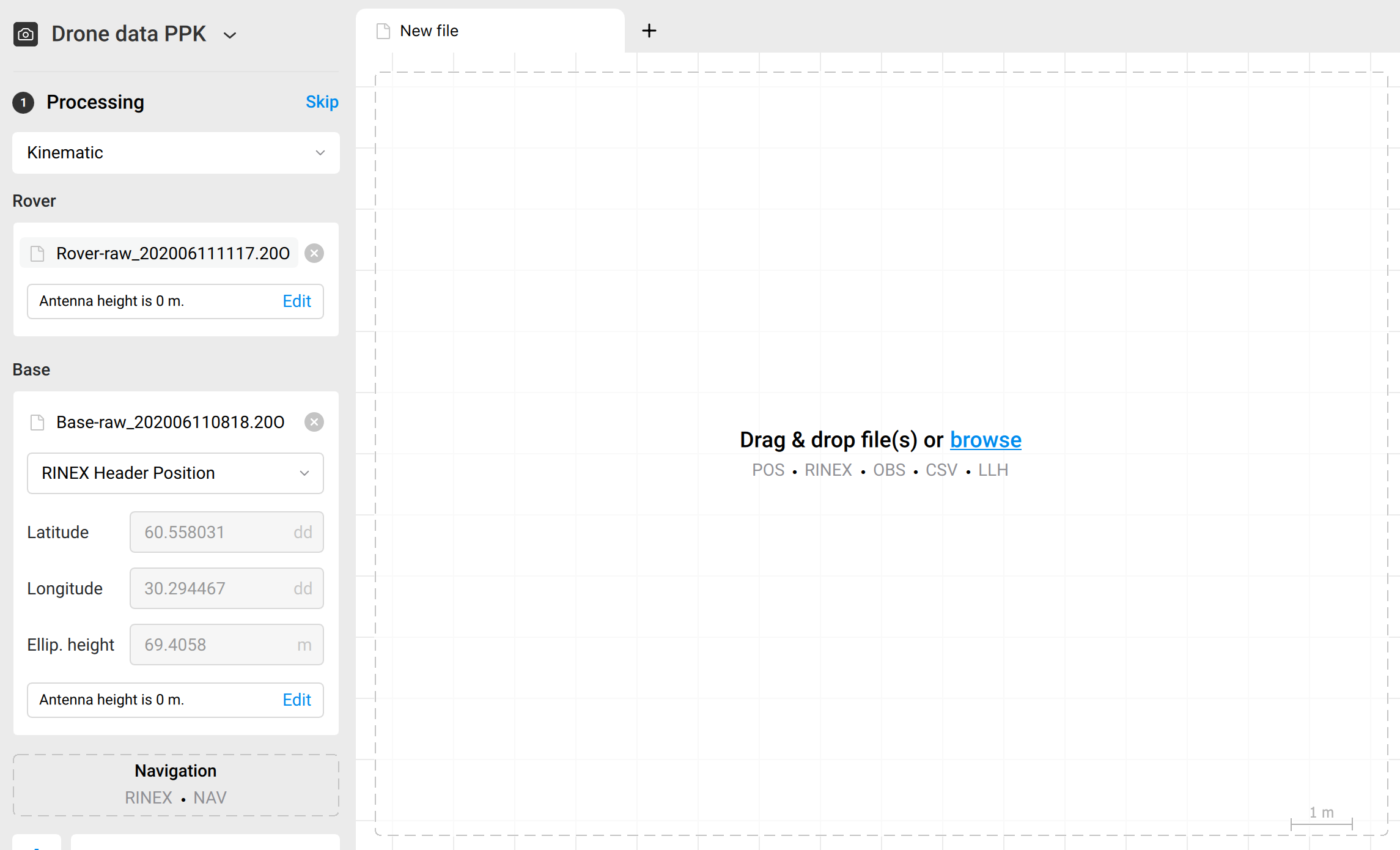
Pour post-traiter les fichiers de la base et du rover, suivez les étapes ci-dessous :
-
Ajoutez le fichier d'observation RINEX du rover.
-
Réglez la hauteur de l'antenne en mètres.
astuceNous recommandons de laisser la hauteur de l'antenne à 0. Généralement, le logiciel de photogrammétrie dispose de la fonction de calcul du décalage de l'antenne (position du centre de la caméra par rapport à la position de l'antenne).
-
Ajoutez le fichier d'observation RINEX de la base.
-
Réglez les coordonnées de la base.
astucePar défaut, la position de l'en-tête RINEX est utilisée. Si vous placez votre base sur un point avec des coordonnées connues, entrez manuellement les coordonnées et la hauteur de l'antenne. De cette manière, vous obtiendrez une exactitude absolue.
-
Ajoutez le fichier de navigation RINEX de la base ou du rover.
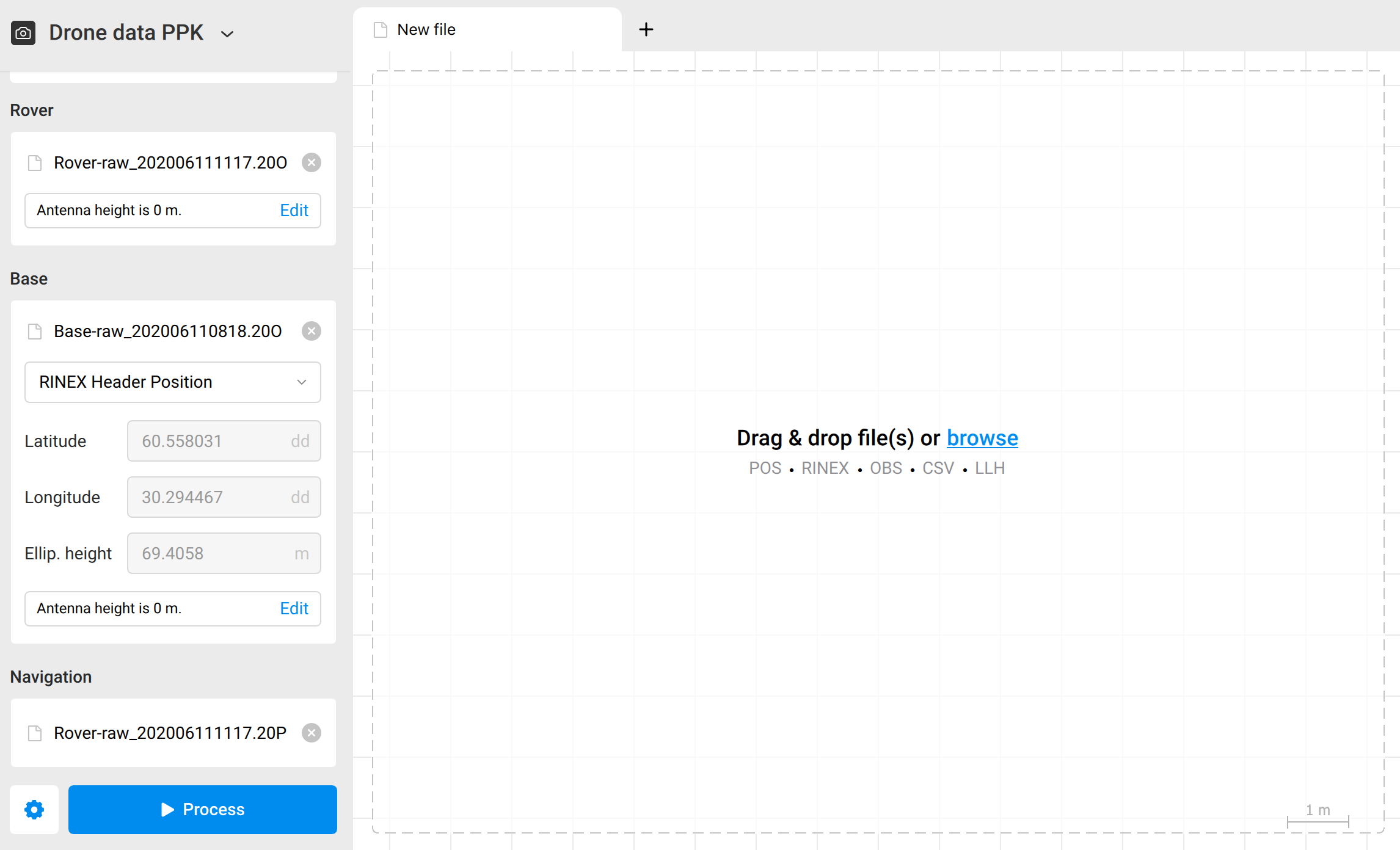
-
Cliquez sur Process (Traiter). Vous verrez la barre de progression dans le coin inférieur gauche.
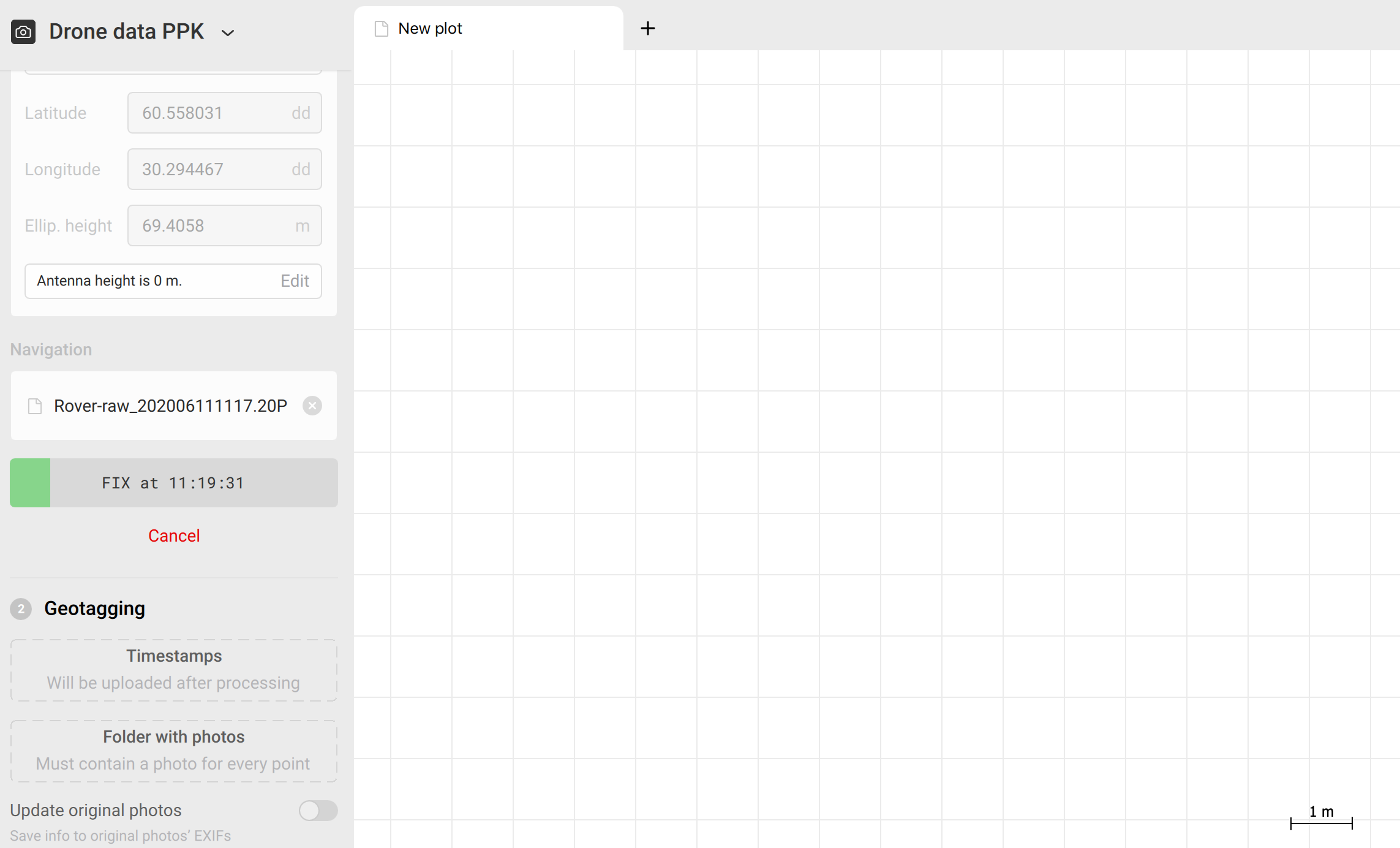
-
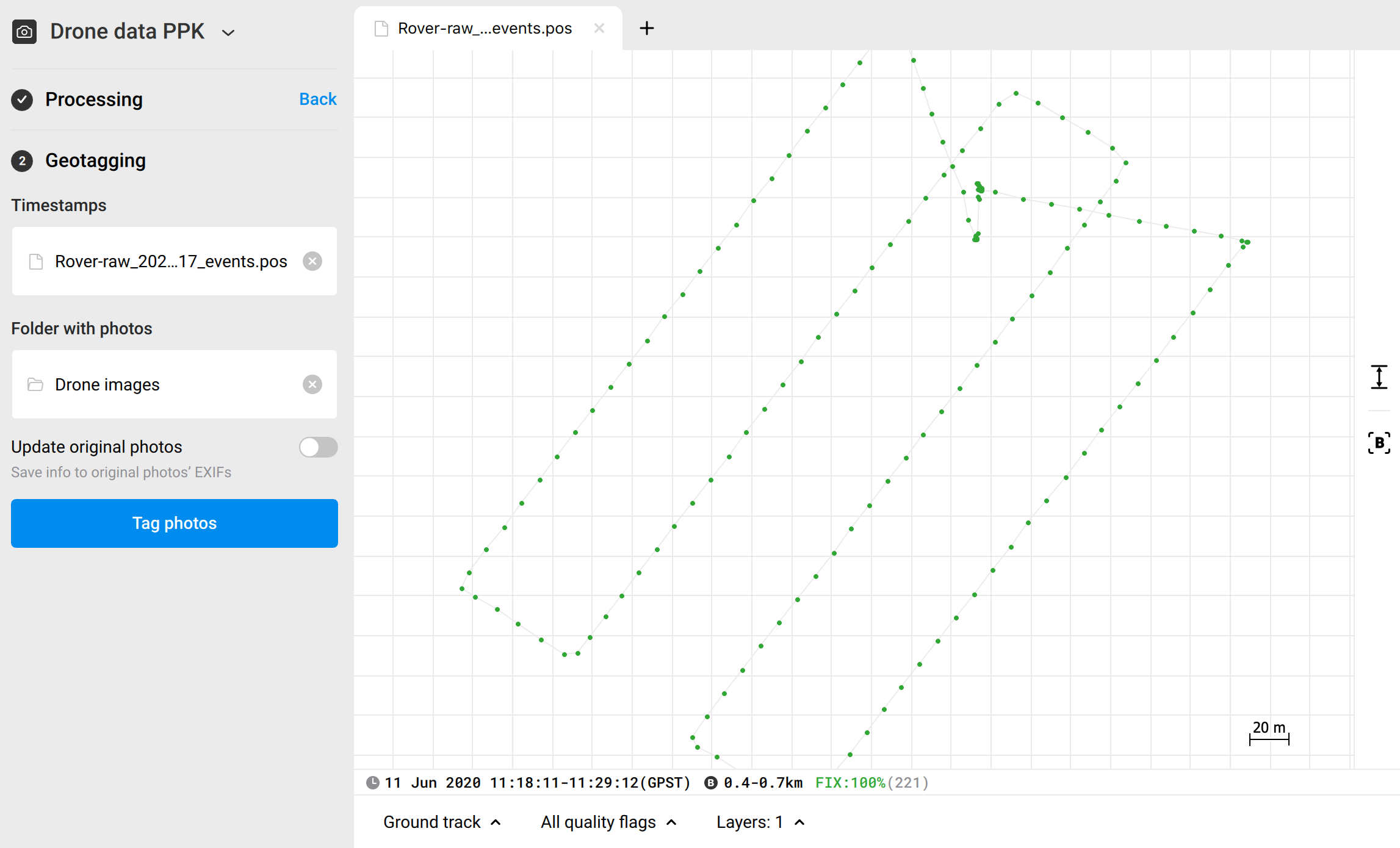
Une fois le fichier .pos prêt, Emlid Studio l'affichera sur le graphique. Le fichier _events.pos avec les positions précises des photos sera automatiquement ajouté au champ Timestamps (Horodatage) dans la section Geotagging (Géolocalisation).
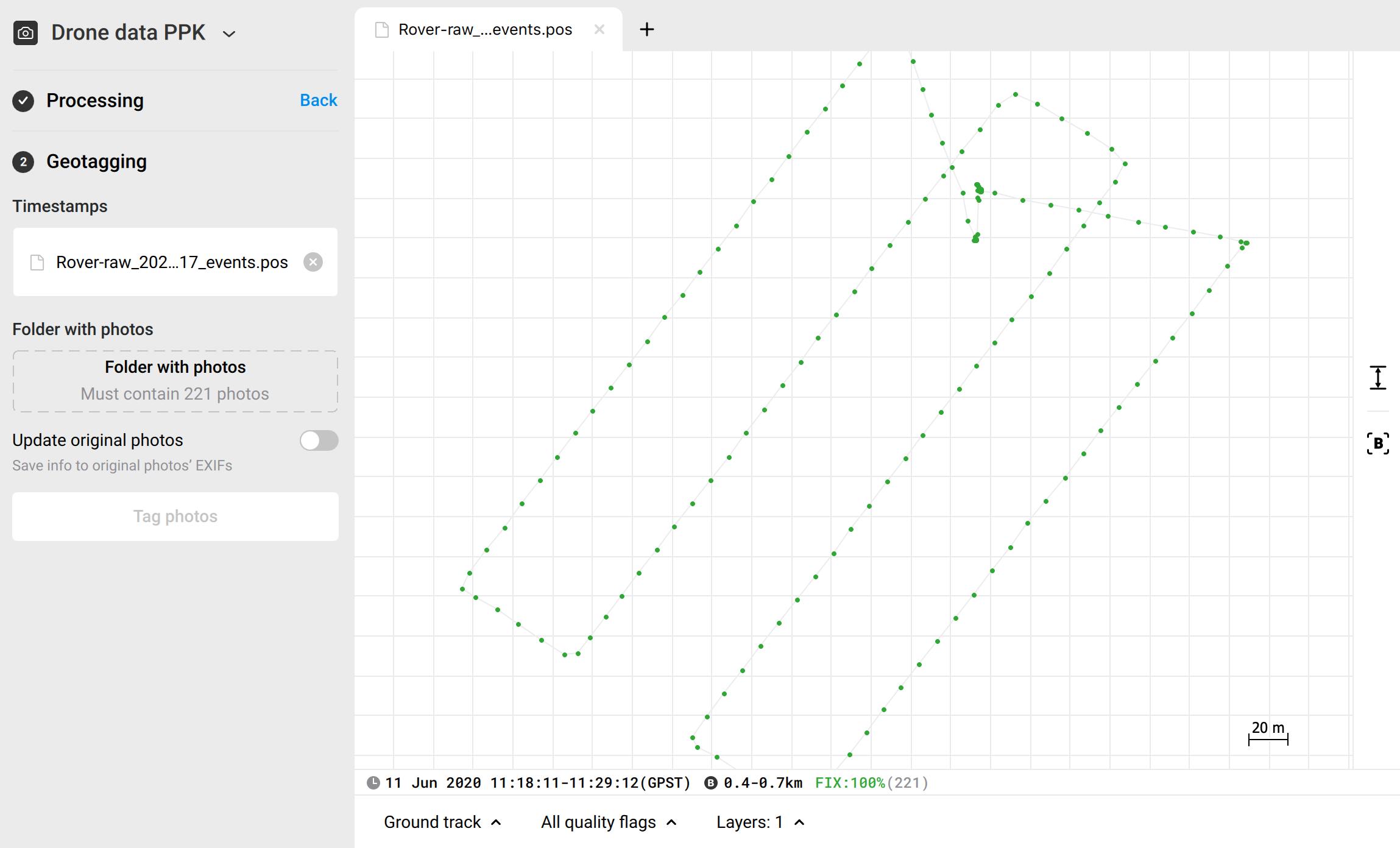
Géolocalisation
Si vous avez ignoré les étapes ci-dessus, vous devez ajouter manuellement le fichier _events.pos. Faites-le glisser et déposez-le dans le champ Timestamps (Horodatage).
Pour géolocaliser vos photos, suivez les étapes ci-dessous :
-
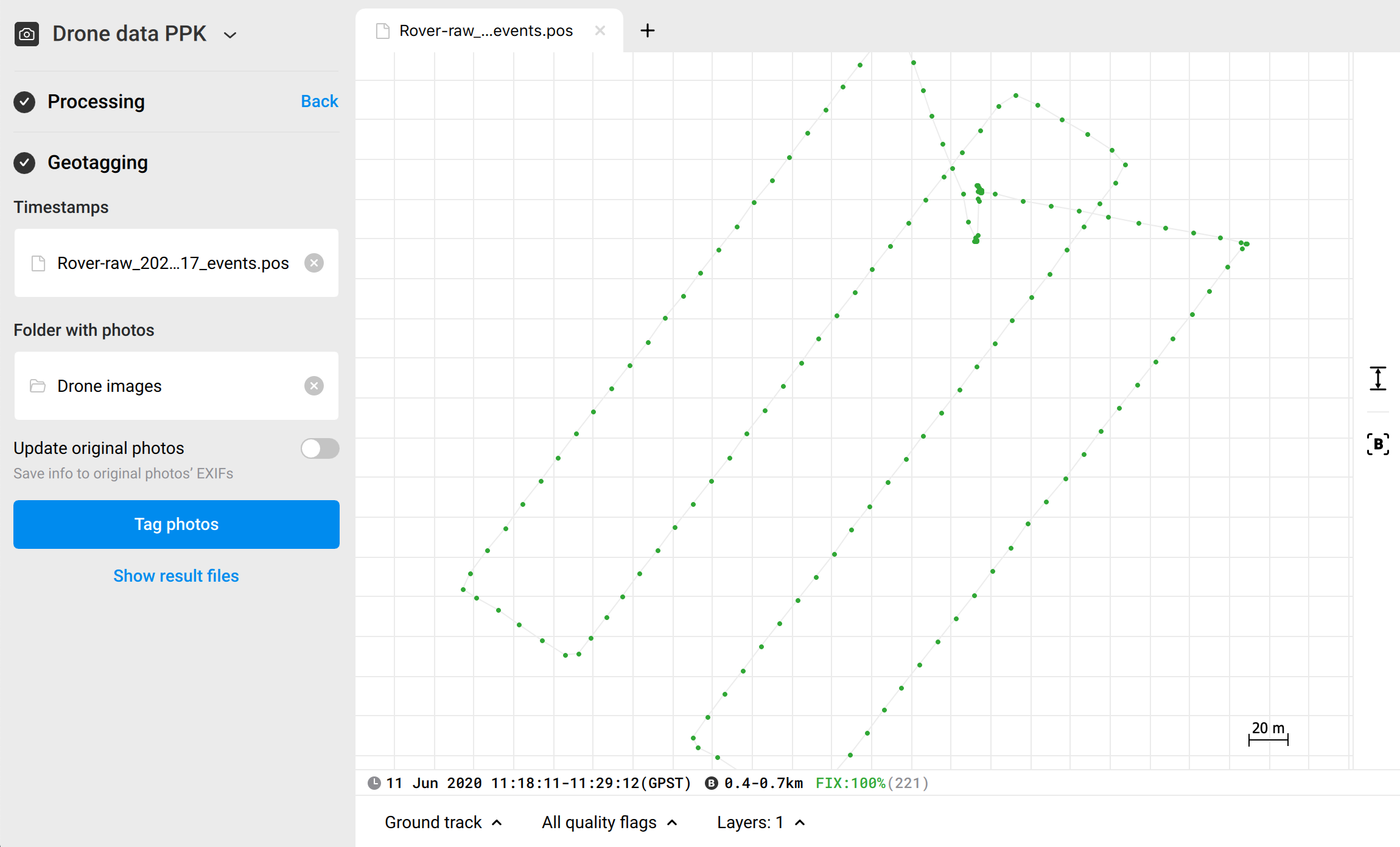
Sélectionnez le dossier contenant les photos de la caméra du drone.
remarqueEmlid Studio ne peut géolocaliser les photos que lorsque le nombre d'horodatages est égal au nombre de photos.
astuceSi vous souhaitez mettre à jour les photos originales avec des géolocalisations, activez Update original photos (Mettre à jour les photos originales). Par défaut, Emlid Studio crée des copies géolocalisées des photos dans un nouveau dossier.
-
Cliquez sur le bouton Tag photos (Marquer les photos). Le processus de géolocalisation commencera. Lorsque le traitement est terminé, vous pouvez cliquer sur Show result files (Afficher les fichiers résultants) pour voir les photos géolocalisées.
Une fois que vous avez les photos géolocalisées, vous pouvez procéder à la création d'une carte dans le logiciel de photogrammétrie.
Pour créer une carte avec Pix4DMapper, consultez le tutoriel Créer la carte dans Pix4DMapper.