Geotagging di foto con Emlid Studio
Per saperne di più sulla post-elaborazione con la nostra applicazione desktop multipiattaforma Emlid Studio, consultare la nostra documentazione.
Questa guida illustra il processo di geotagging delle immagini del drone in Emlid Studio, utilizzate per la mappatura successiva nel software di fotogrammetria.
Panoramica
Con la funzione Dati drone PPK, è possibile aggiungere facilmente i geotag ai dati EXIF delle immagini del drone ed elaborarli in seguito nel software di fotogrammetria. Per eseguire il geotagging, sono necessari i log dei dati grezzi della base e del rover, o un file POS pronto con gli eventi, e le immagini del drone. Il processo include due fasi: elaborazione e geotagging. È possibile saltare l'elaborazione e caricare i propri file _events.pos per ottenere foto geotaggate.
Per iniziare
Per saperne di più, consultare l'articolo Come funziona il PPK.
Come risultato della missione di mappatura, è necessario disporre dei seguenti file:
- Log RINEX di una base
- Log RINEX di un rover
- Set di immagini dalla fotocamera del drone
- File CSV di Emlid Flow con le coordinate dei punti di controllo a terra
I dati RINEX saranno utilizzati per ottenere coordinate precise per il geotagging delle immagini. Il file CSV non è necessario in questa fase, ma è essenziale per la mappatura successiva nel software di fotogrammetria.
Flusso di lavoro
Post-elaborazione
Se si sono già post-elaborati i file RINEX della base e del rover e si è ottenuto il file _events.pos, passare direttamente alla sezione Geotagging.
Per post-elaborare i file della base e del rover, seguire i passaggi seguenti:
-
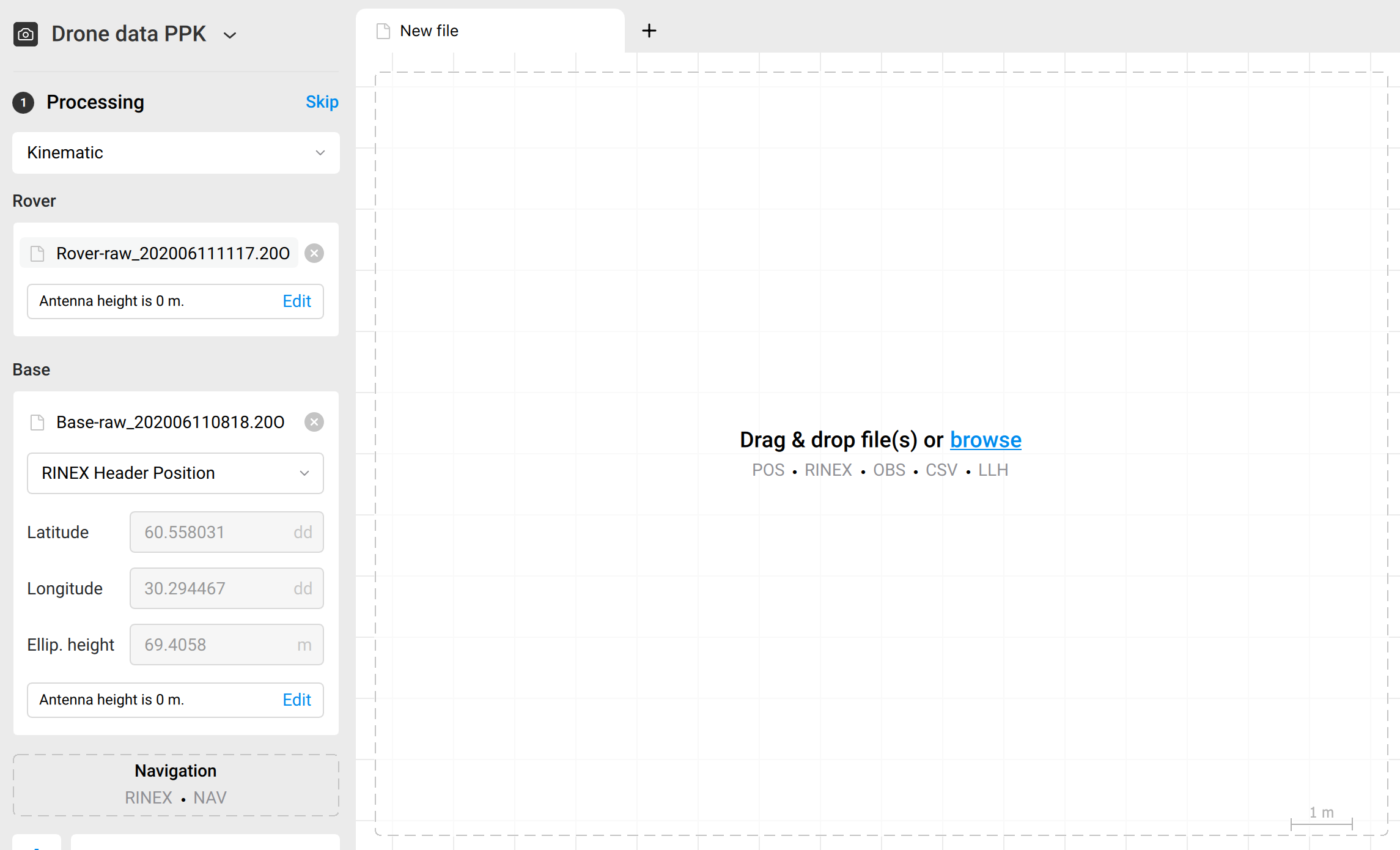
Aggiungere il file di osservazione RINEX del rover.
-
Impostare l'altezza dell'antenna in metri.
suggerimentoSi consiglia di lasciare l'altezza dell'antenna a 0. Generalmente, il software di fotogrammetria ha la funzione di calcolare l'offset dell'antenna (posizione del centro della fotocamera rispetto alla posizione dell'antenna).
-
Aggiungere il file di osservazione RINEX della base.
-
Impostare le coordinate della base.
suggerimentoPer impostazione predefinita, viene utilizzata la Posizione dell'intestazione RINEX. Se si posiziona la base su un punto con coordinate note, inserire manualmente le coordinate e l'altezza dell'antenna. In questo modo, si otterrà una precisione assoluta.
-
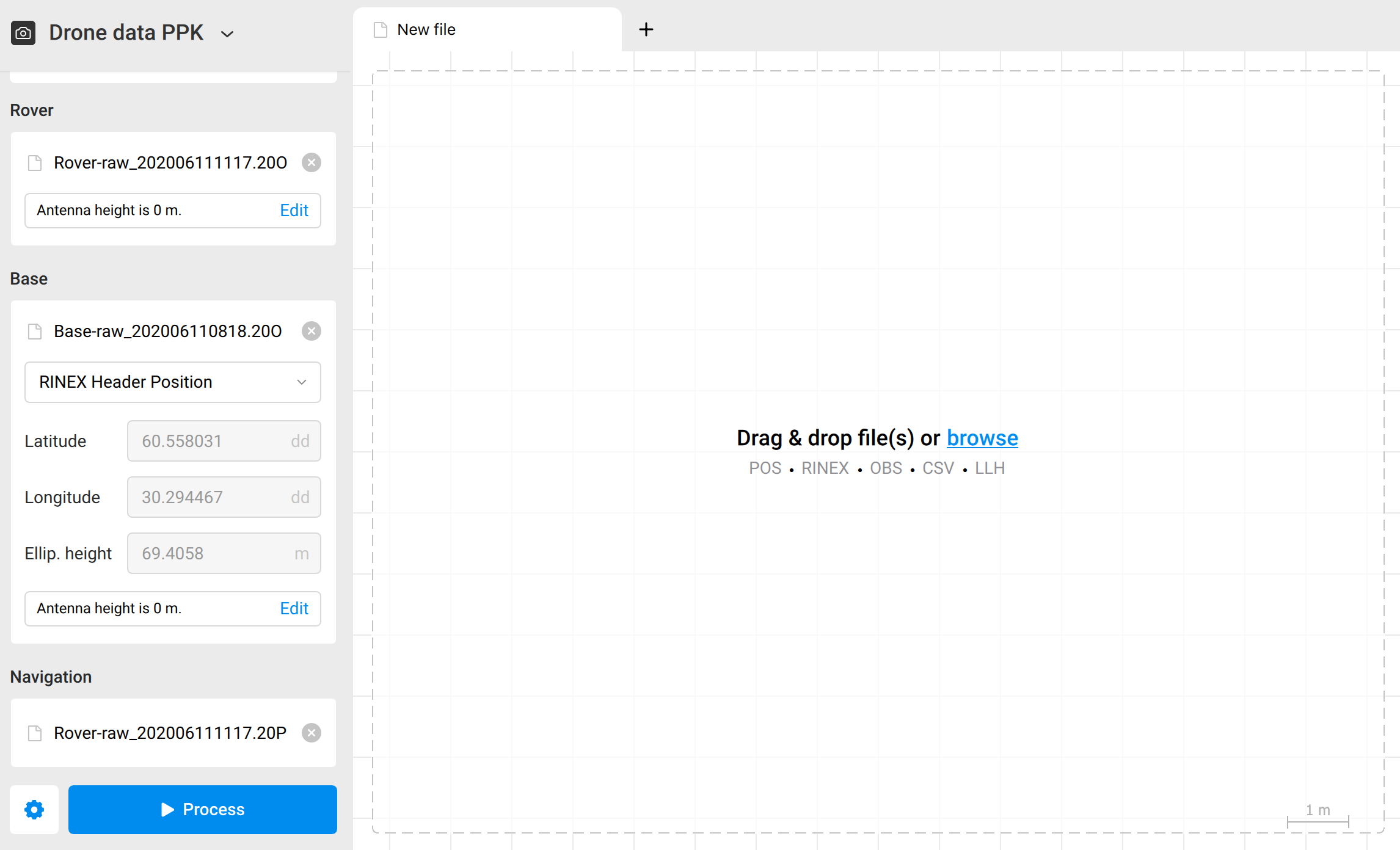
Aggiungere il file di navigazione RINEX dalla base o dal rover.
-
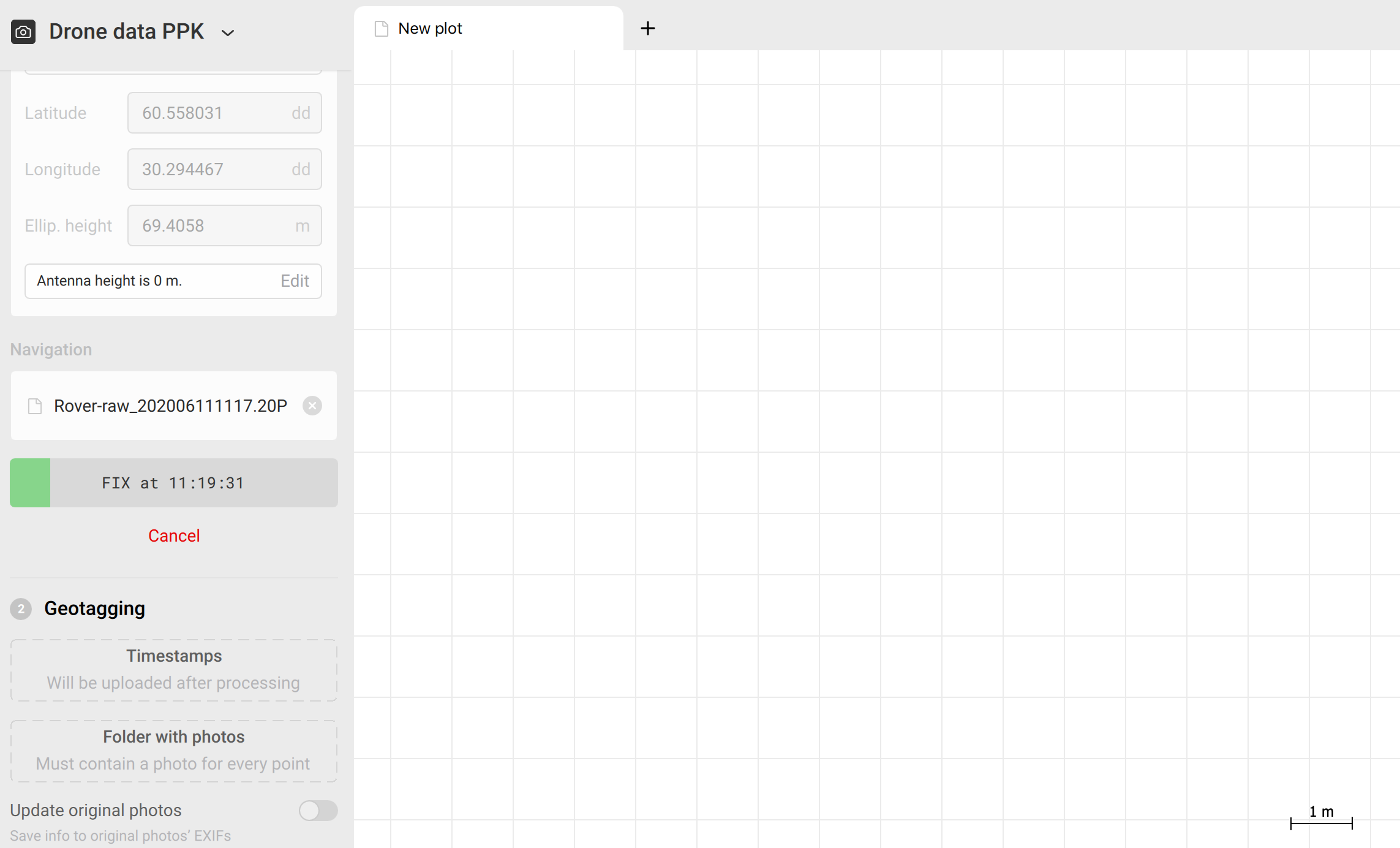
Fare clic su Process (Elabora). Verrà visualizzata la barra di avanzamento nell'angolo in basso a sinistra.
-
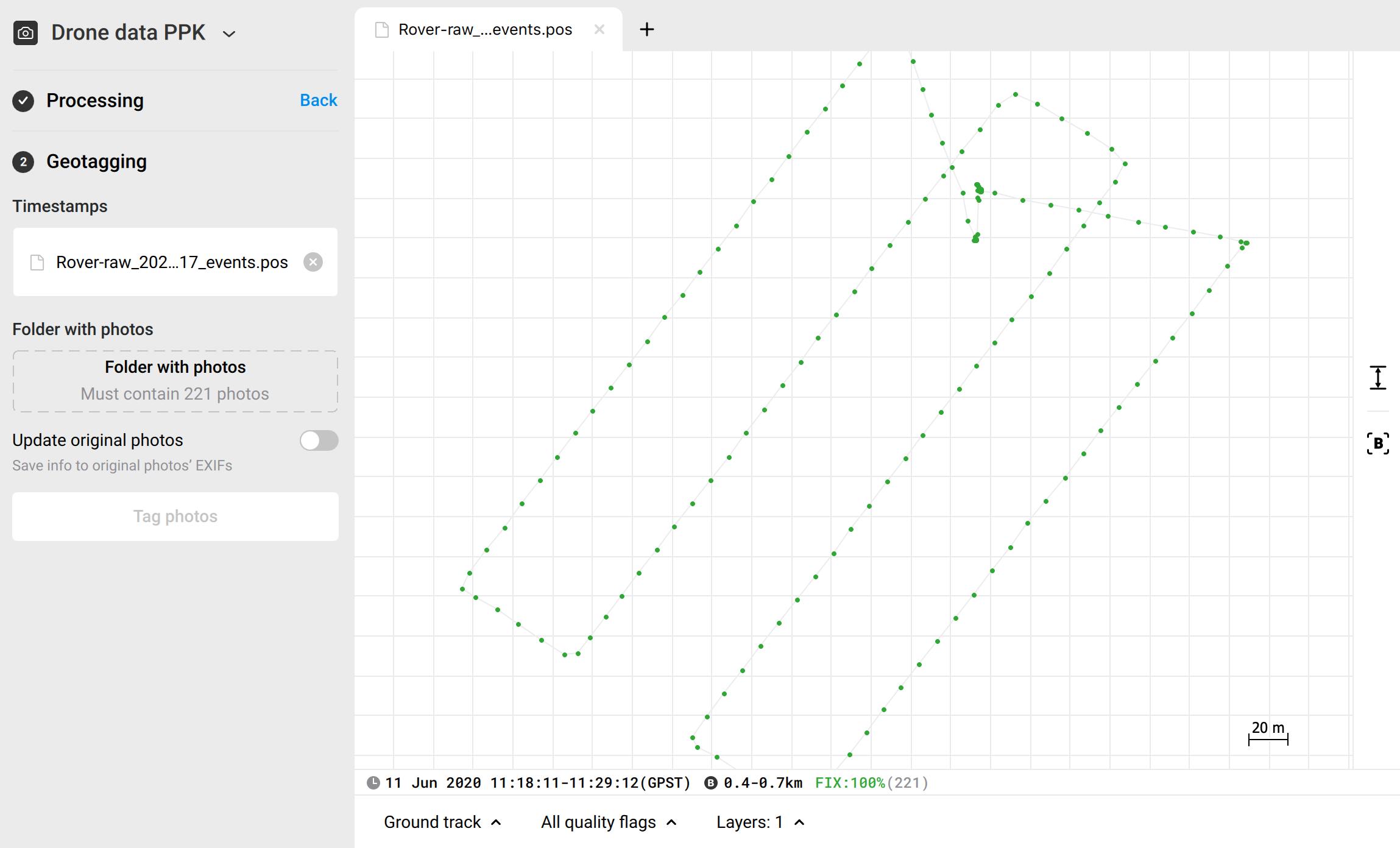
Una volta che il file .pos è pronto, Emlid Studio lo mostrerà sul grafico. Il file _events.pos con le posizioni precise delle foto verrà aggiunto automaticamente al campo Timestamps (Marca temporale) nella sezione Geotagging.
Geotagging
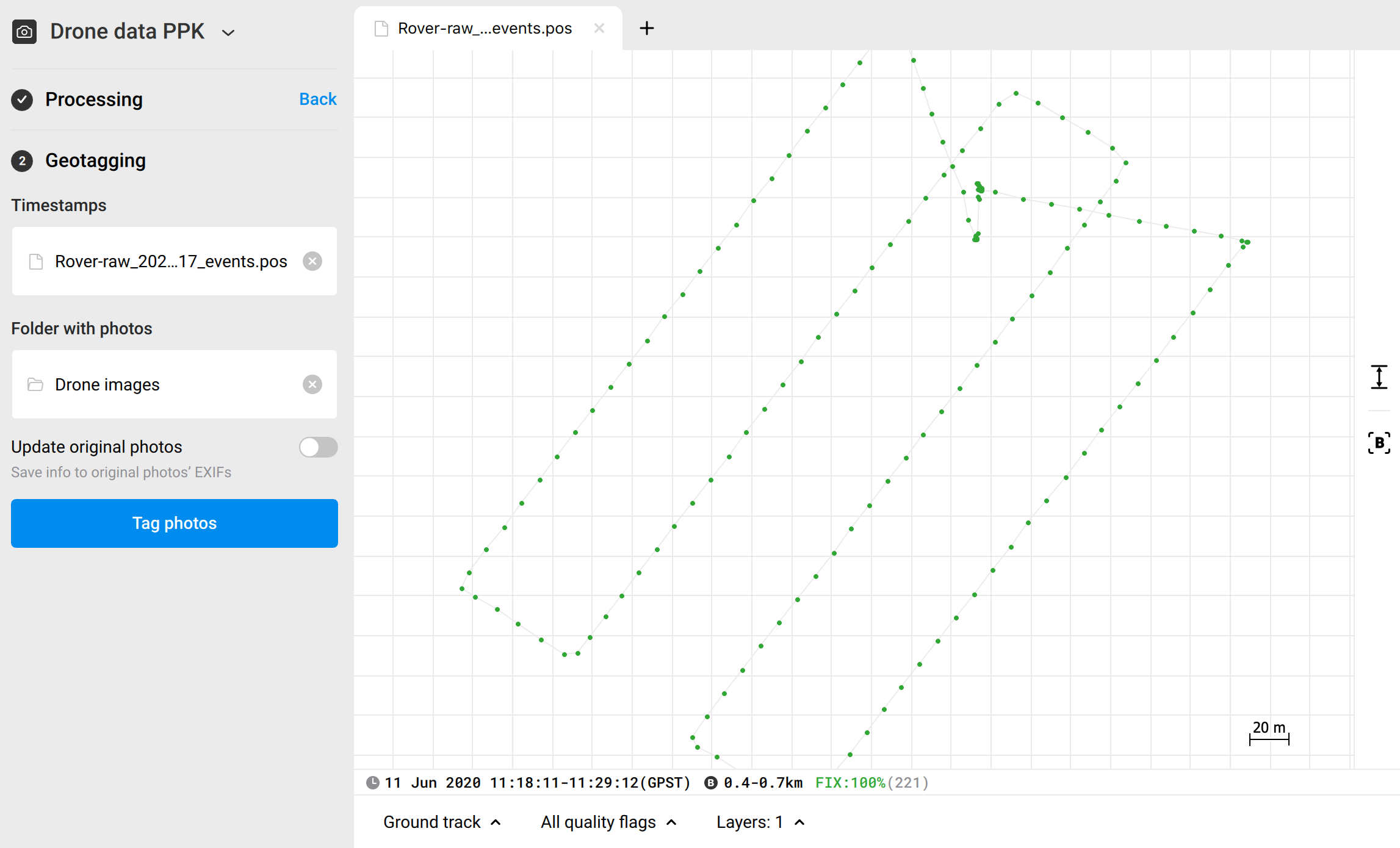
Se si sono saltati i passaggi precedenti, è necessario aggiungere manualmente il file _events.pos. Trascinarlo nel campo Timestamps (Marca temporale).
Per geotaggare le foto, seguire i passaggi seguenti:
-
Selezionare la cartella che contiene le foto della fotocamera del drone.
noteEmlid Studio può geotaggare le foto solo quando il numero di timestamp è uguale al numero di foto.
suggerimentoSe si desidera aggiornare le foto originali con i geotag, attivare Update original photos (Aggiorna le foto originali). Per impostazione predefinita, Emlid Studio crea copie geotaggate delle foto in una nuova cartella.
-
Fare clic sul pulsante Tag photos (Tagga le foto). Il processo di geotagging avrà inizio. Al termine dell'elaborazione, è possibile fare clic su Show result files (Mostra i file dei risultati) per visualizzare le foto geotaggate.
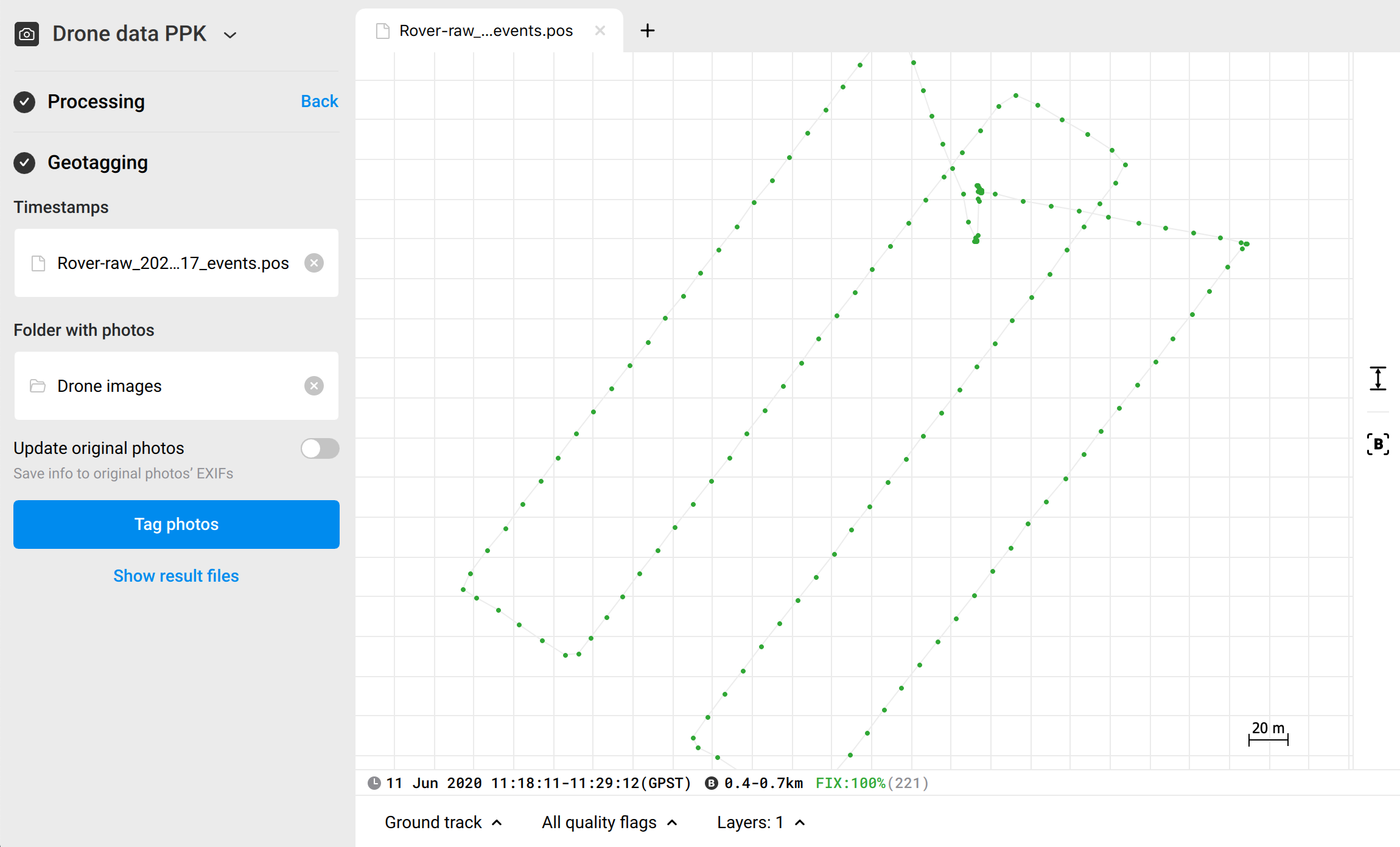
Una volta ottenute le foto geotaggate, è possibile procedere con la creazione di una mappa nel software di fotogrammetria.
Per creare una mappa con Pix4DMapper, consultare il tutorial Creazione della mappa in Pix4DMapper.