Guía RTK de senseFly
Resumen
En este tutorial, encontrará información sobre cómo realizar un levantamiento en RTK con drones senseFly y Reach RS2/RS2+.
También puede encontrar una guía paso a paso en la base de conocimiento de senseFly.
Configuración de Reach RS2/RS2
En esta parte, explicaremos cómo configurar el Reach RS2/RS2+ para transmitir correcciones al PC a través de Bluetooth.
Colocación del receptor Reach RS2/RS2
El siguiente vídeo muestra cómo colocar la base Reach RS2/RS2+ sobre un punto conocido.
Para conocer otras formas de colocar la estación base local, consulta la guía Colocación de la base.
A continuación, se describen los pasos generales para colocar el receptor base.
-
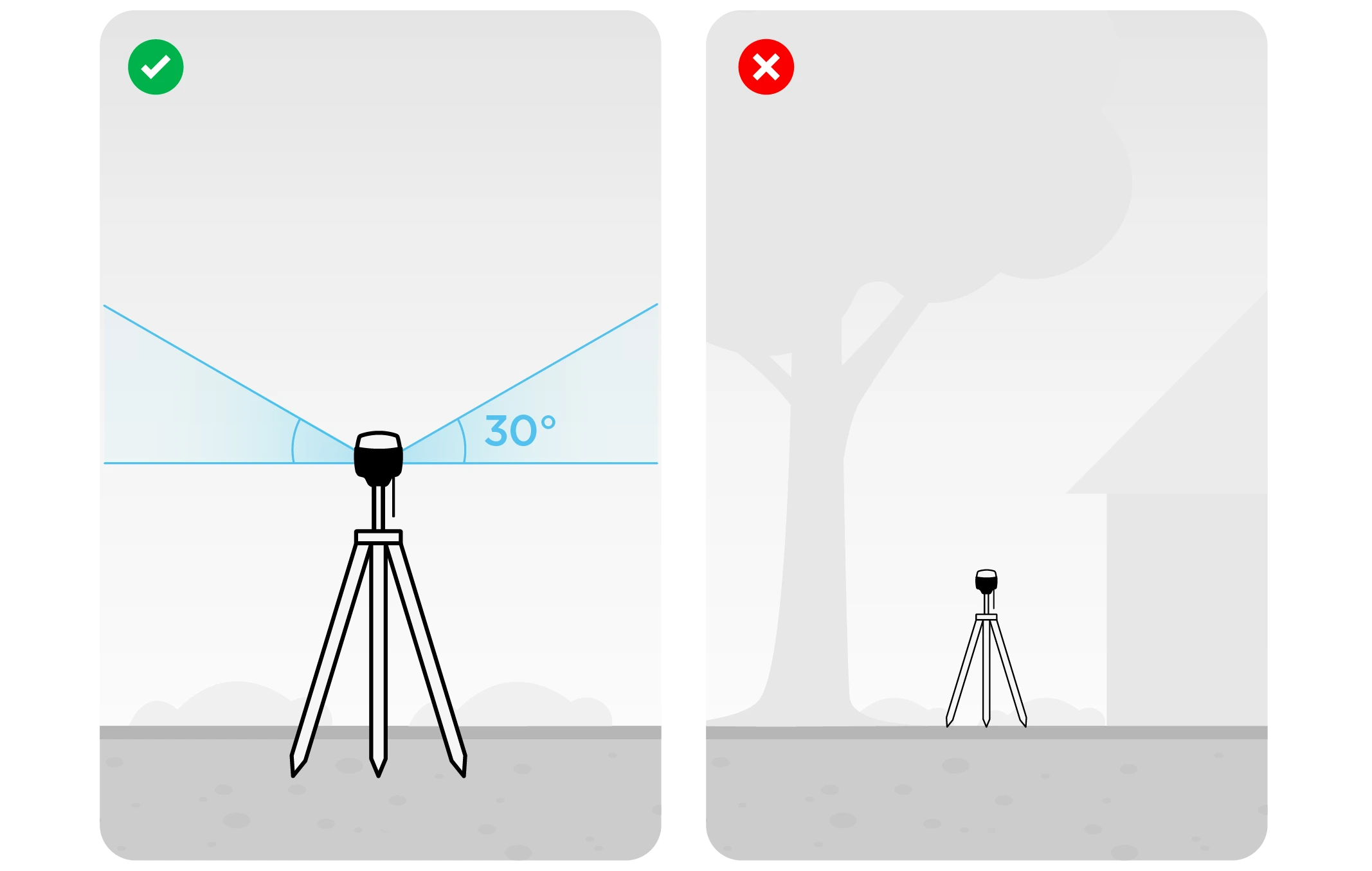
Asegúrese de elegir una ubicación adecuada para colocar la estación base Reach RS2/RS2+. Eche un vistazo a las 2 imágenes siguientes. La imagen de la izquierda muestra las condiciones adecuadas para la ubicación de la base. El de la derecha es un ejemplo de malas condiciones del entorno, como visión reducida del cielo, posibles obstrucciones o vegetación cercana.
-
Asegúrese de que su Reach RS2/RS2+ esté nivelado y colocado exactamente sobre el punto marcado en el trípode.
-
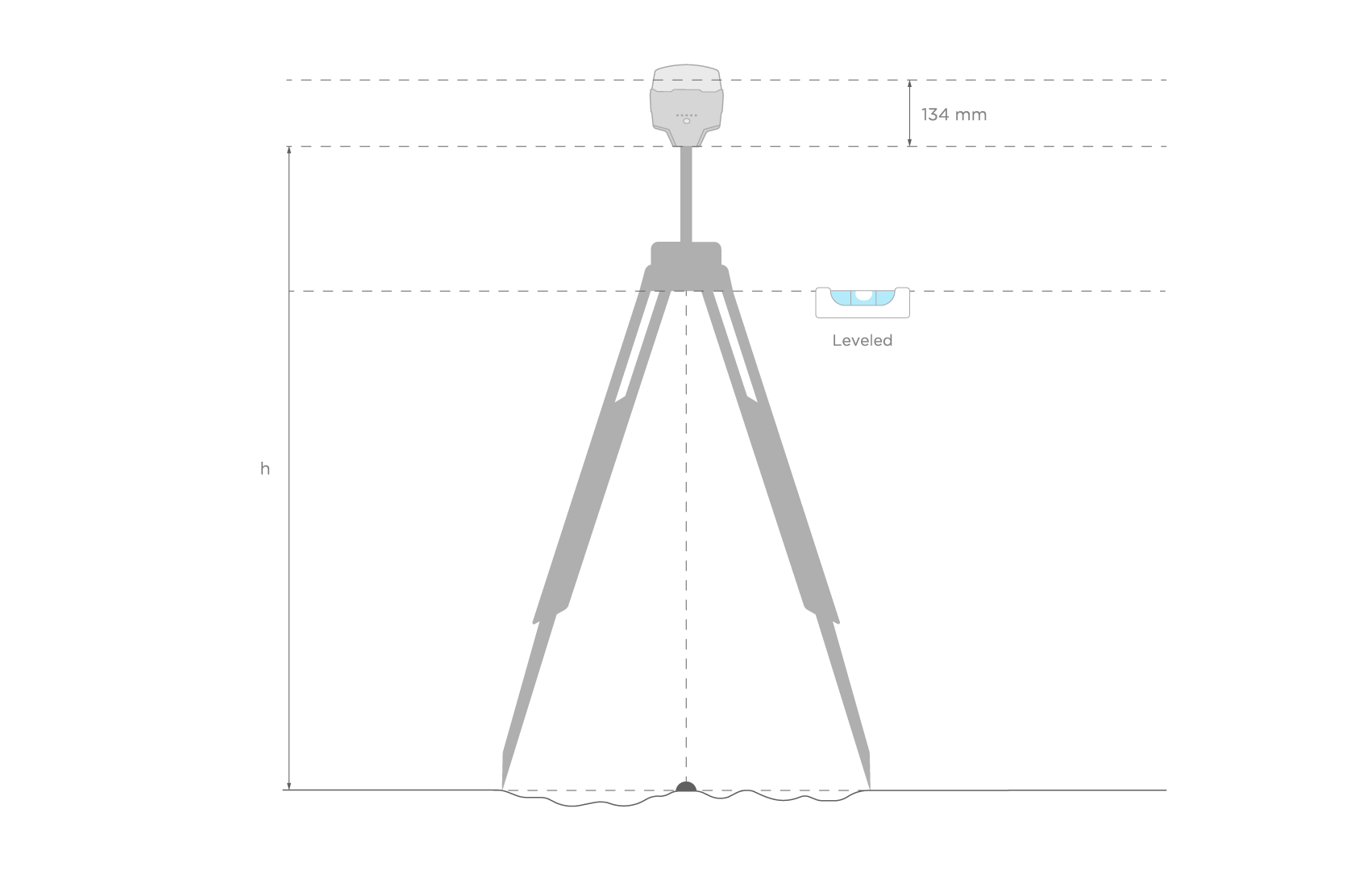
Si está configurando las coordenadas de la base manualmente, mida el desplazamiento de la altura de la antena.
noteLa altura de la antena se mide como la distancia entre la marca y el punto de referencia de la antena (ARP).
Para Reach RS2/RS2+, considere la altura de la antena como la distancia entre la marca y la parte inferior de Reach RS2/RS2+ (h en la figura inferior) más 134 mm.
noteSi necesita una precisión absoluta a nivel centimétrico, deberá calcular una coordenada base absoluta.
Si necesita una precisión relativa a nivel centimétrico, puede promediar la posición de la base.
Emparejamiento con PC
-
Abra Emlid Flow y conéctese a su Reach.
:::consejo Pasos para conectarse a través del punto de acceso
Para obtener más información, consulte la guía Conectarse a Reach.
:::
-
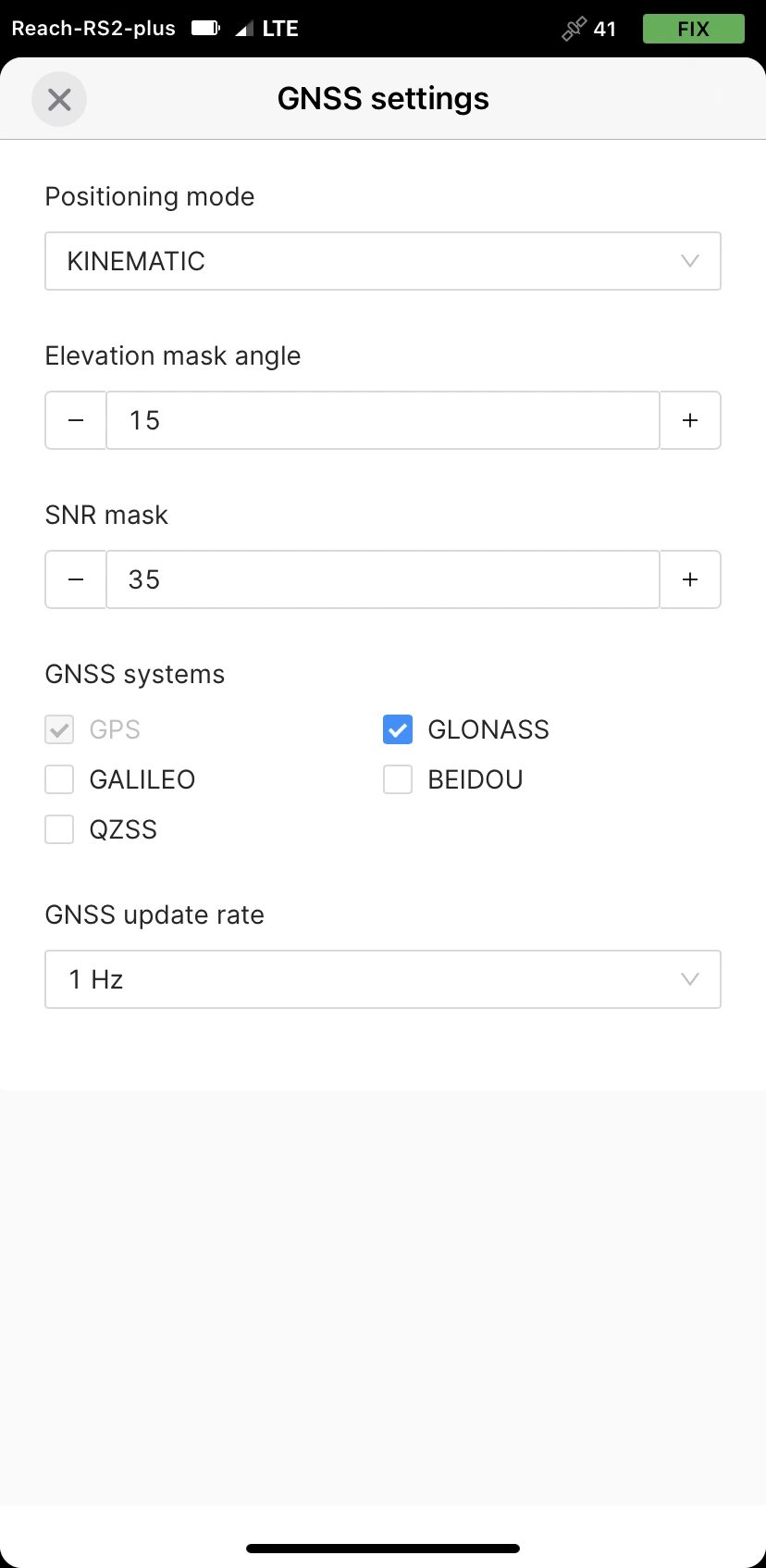
En la pantalla Configuración, pulse Configuración de GNSS.
-
Seleccione las constelaciones GNSS como se indica a continuación.
notePara trabajar con drones eBee, habilite GPS y GLONASS a 1 Hz.
-
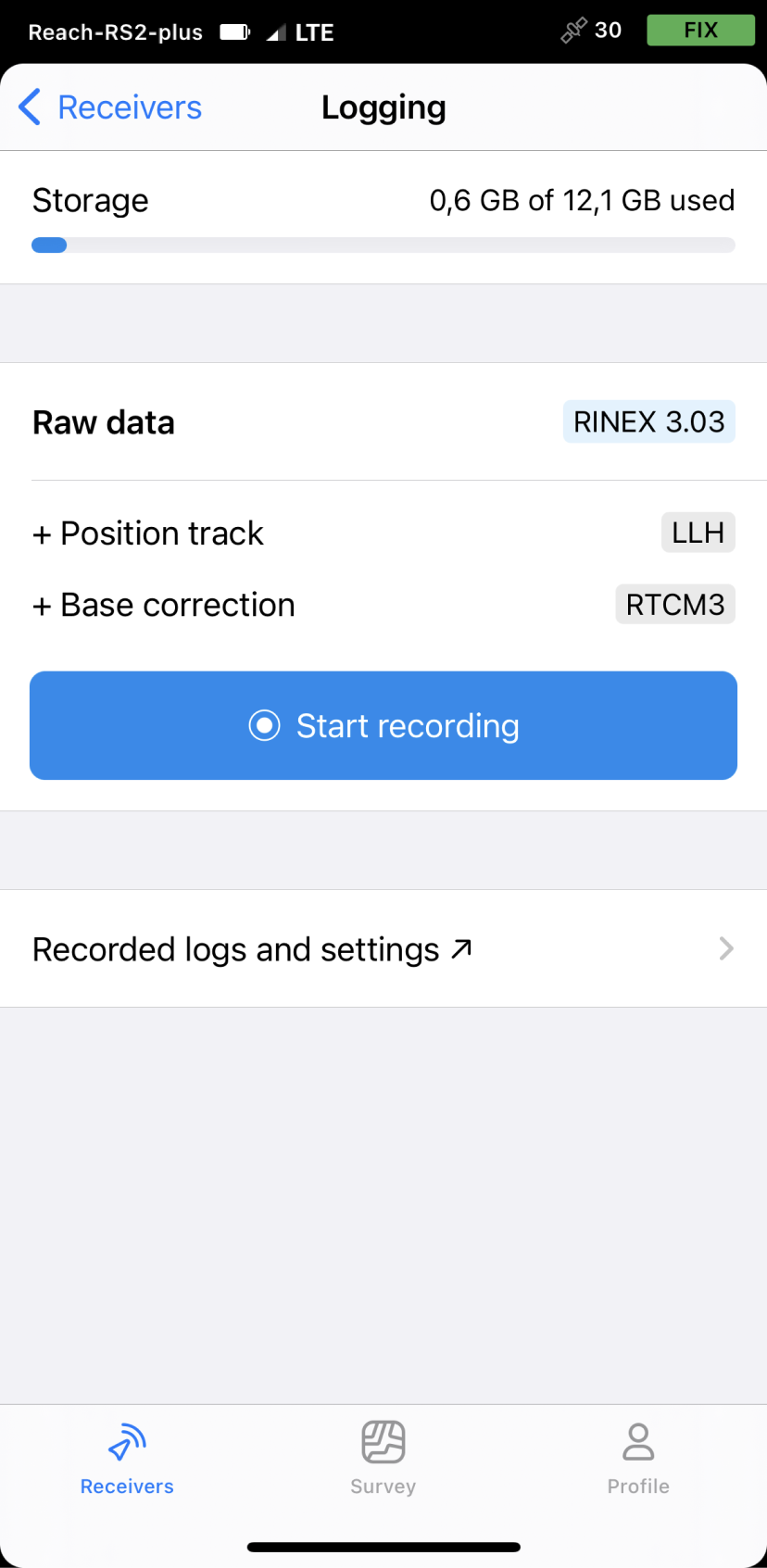
Vuelva a la pantalla Receptores y pulse Registro.
-
Pulse el botón Configuración y registros grabados.
-
To configure logging, tap the blue gear button.
-
En el menú desplegable Format and presets (Formato y preajustes), elige UBX. Aplique los cambios y cierre la pantalla Registro.
-
Vaya a Configuración y pulse Bluetooth.
-
Active el Bluetooth pulsando el botón Activar Bluetooth.
-
Pulse Capacidad de descubrimiento y active la opción Capacidad de descubrimiento. Pulse Guardar para aplicar los cambios.
-
Active el Bluetooth en su PC.
-
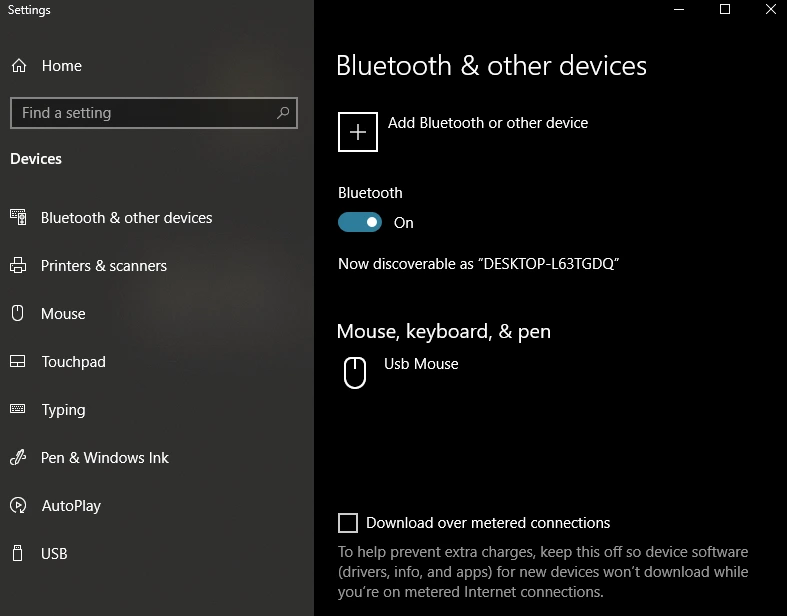
Abra la configuración de Bluetooth.
-
Haga clic en Añadir Bluetooth u otro dispositivo.
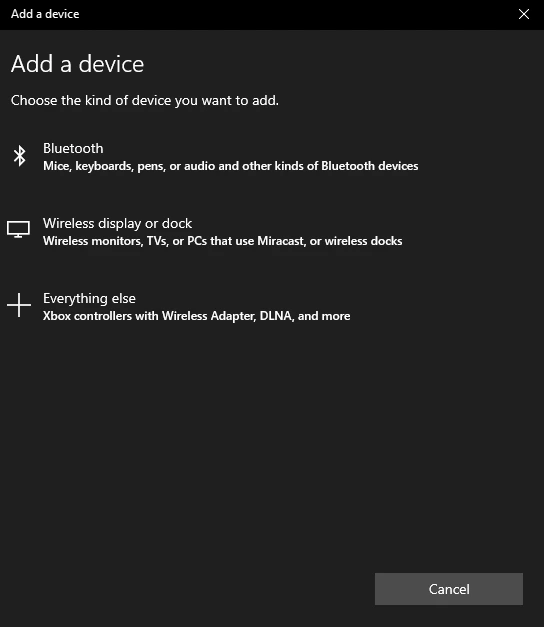
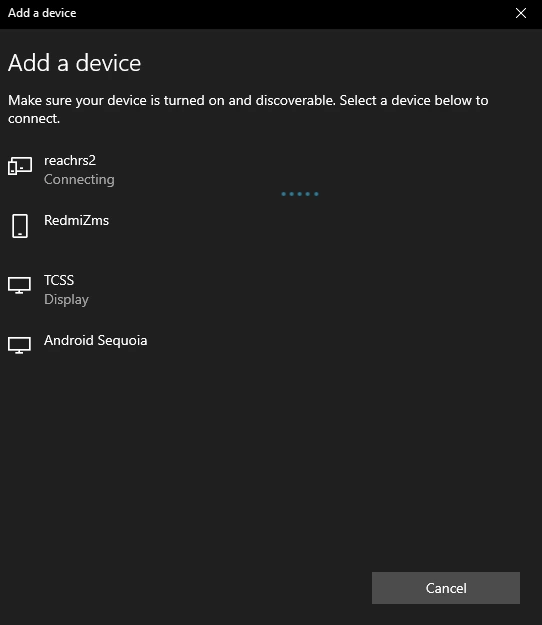
- Elija la opción Bluetooth en la ventana Añadir un dispositivo.
- Asegúrese de que su Reach RS2/RS2+ pueda detectarse y verse en la lista de dispositivos.
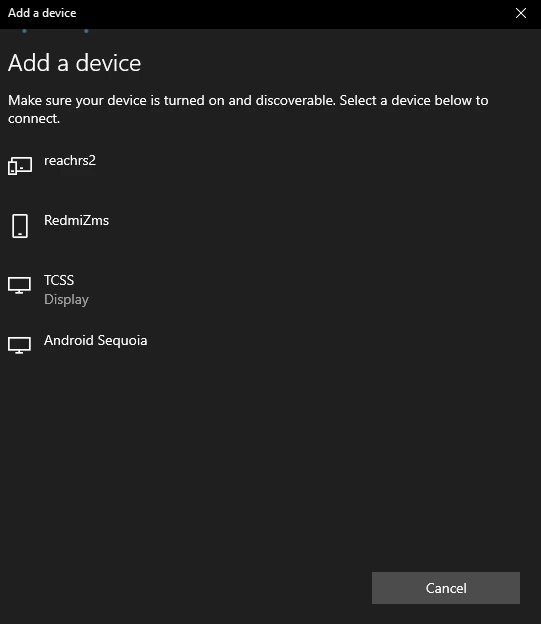
- Cuando vea Reach RS2/RS2+ en la lista, conéctese a él.
Si la conexión se realiza correctamente, aparecerá el mensaje "¡Su dispositivo está listo para funcionar!" (Your device is ready to go!).
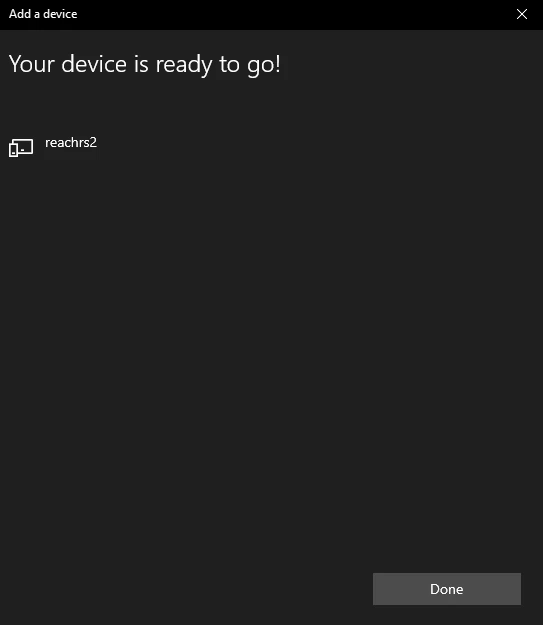
Ahora puede continuar con el siguiente paso.
Configuración de la salida base
-
En la pantalla Receptores de Emlid Flow, pulse Salida de la base.
-
Elija Bluetooth.
-
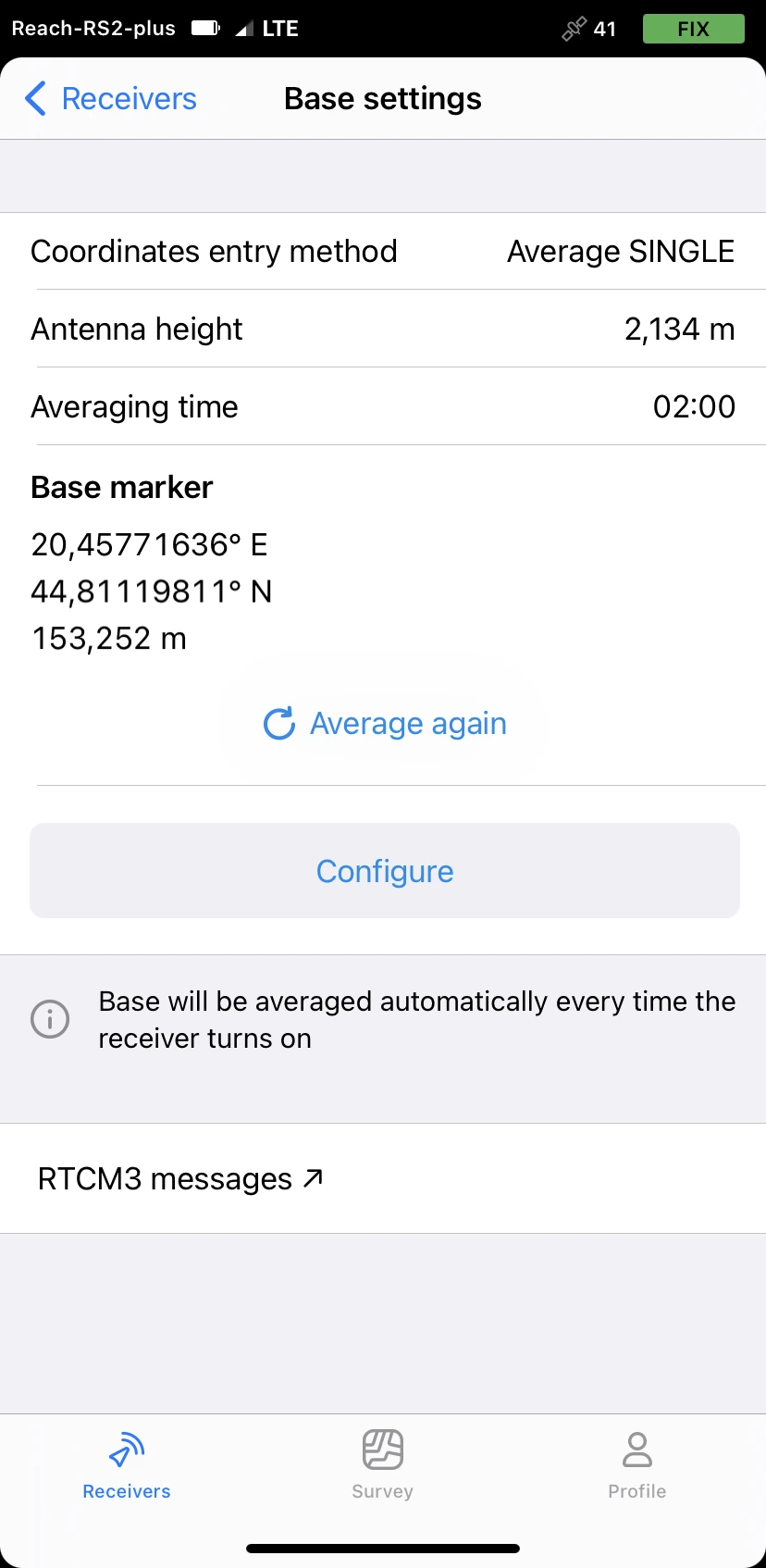
Vuelva a la pantalla Receptores y pulse Configuración de la base.
-
Seleccione Método de introducción de coordenadas. En esta guía utilizamos la Media SINGLE.
tipTo learn more, check the Placing the base guide.
-
Introduzca la Altura de antena y especifique el Tiempo medio.
-
Pulse Mensajes de RTCM3 y especifique los mensajes de RTCM3 transmitidos.
Mensajes de RTCM3 Tipo de mensaje Mensajes mínimos requeridos 1006 Coordenada de la estación ARP 1074 GPS MSM4 **Mensajes opcionales para otros GNSS ** 1084 GLONASS MSM4 1094 Galileo MSM4 1124 BeiDou MSM4 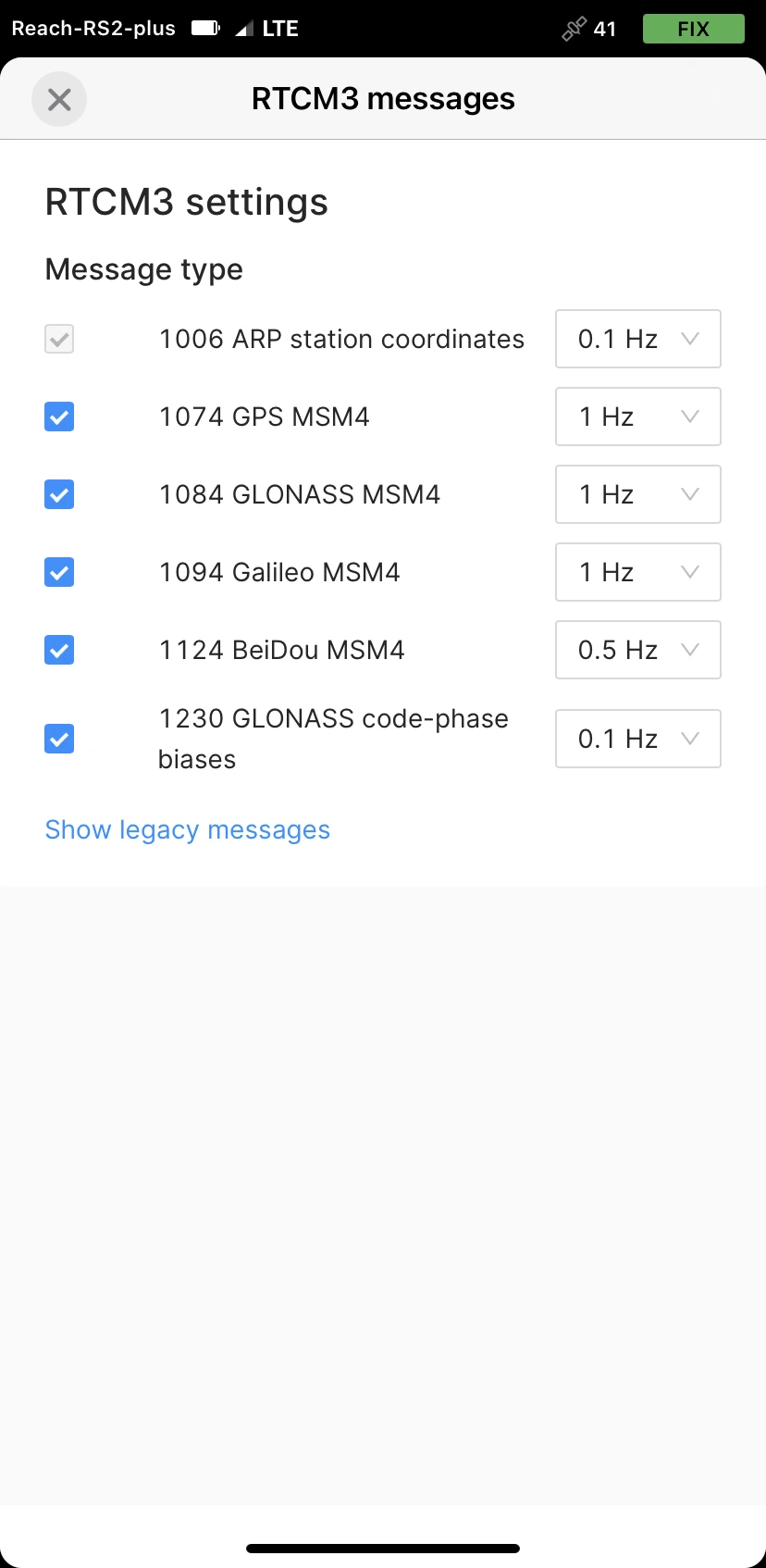
Comprobación de la conexión
Tendrá que averiguar qué puerto COM de su PC utiliza Reach RS2/RS2+. Para ello, recomendamos utilizar el cliente PuTTY para Windows.
-
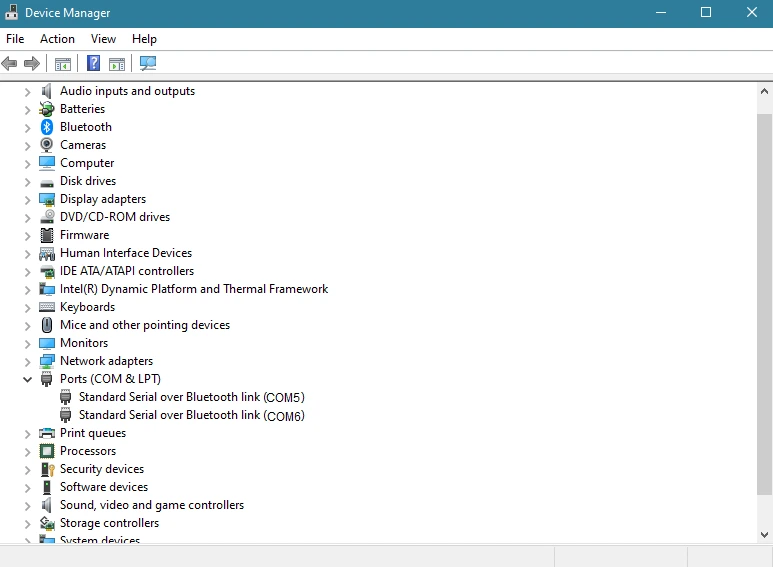
Abra el Administrador de dispositivos (Device Manager) de su ordenador.
-
Compruebe los puertos de enlace serie estándar (Standard Serial) en Bluetooth disponibles.
-
Abra PuTTY.
-
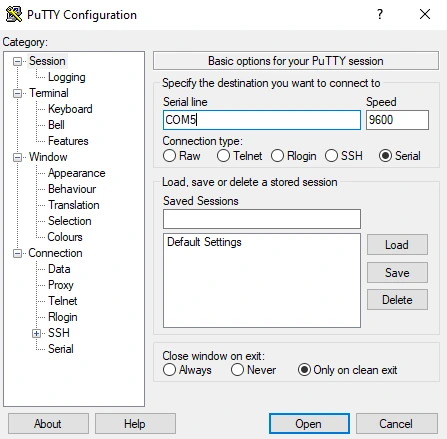
Vaya a la pestaña Sesión (Session).
-
Especifique el puerto COM en la Línea de serie.
-
Elija la velocidad a 9600.
-
Elija el tipo de conexión Serie.
Puede hacer lo mismo en la pestaña Serie (Serial):
-
Vaya a la pestaña Serie.
-
Especifique el puerto COM en la Línea de serie a la que conectarse.
-
Elija la velocidad a 9600.
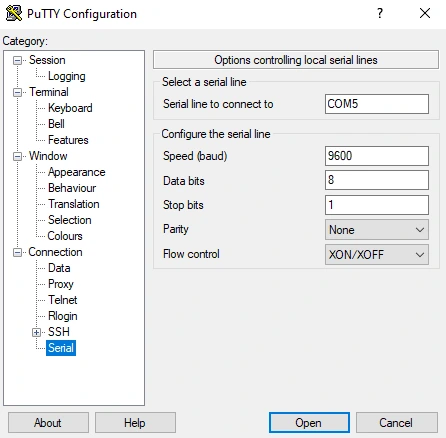
-
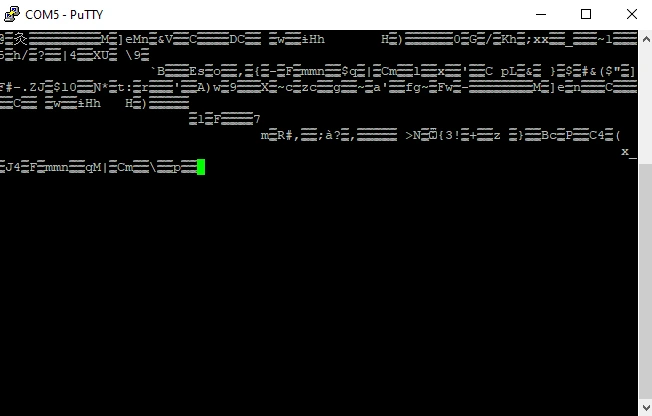
Pulse Abrir.
Si ha elegido el puerto correcto, verá en la pantalla las correcciones de Reach RS2/RS2+ en el formato RTCM3. Si no puede ver los datos que llegan, elija otro puerto COM en línea de serie (Serial line).
Ahora ya puede configurar el enlace RTK en eMotion3
Conexión a eMotion3
Ahora le mostraremos cómo establecer un enlace RTK con la base Reach RS2/RS2+ en su dron eBee.
-
Inicie eMotion3.
-
Cree la misión y vaya a la pestaña Misión (Mission).
-
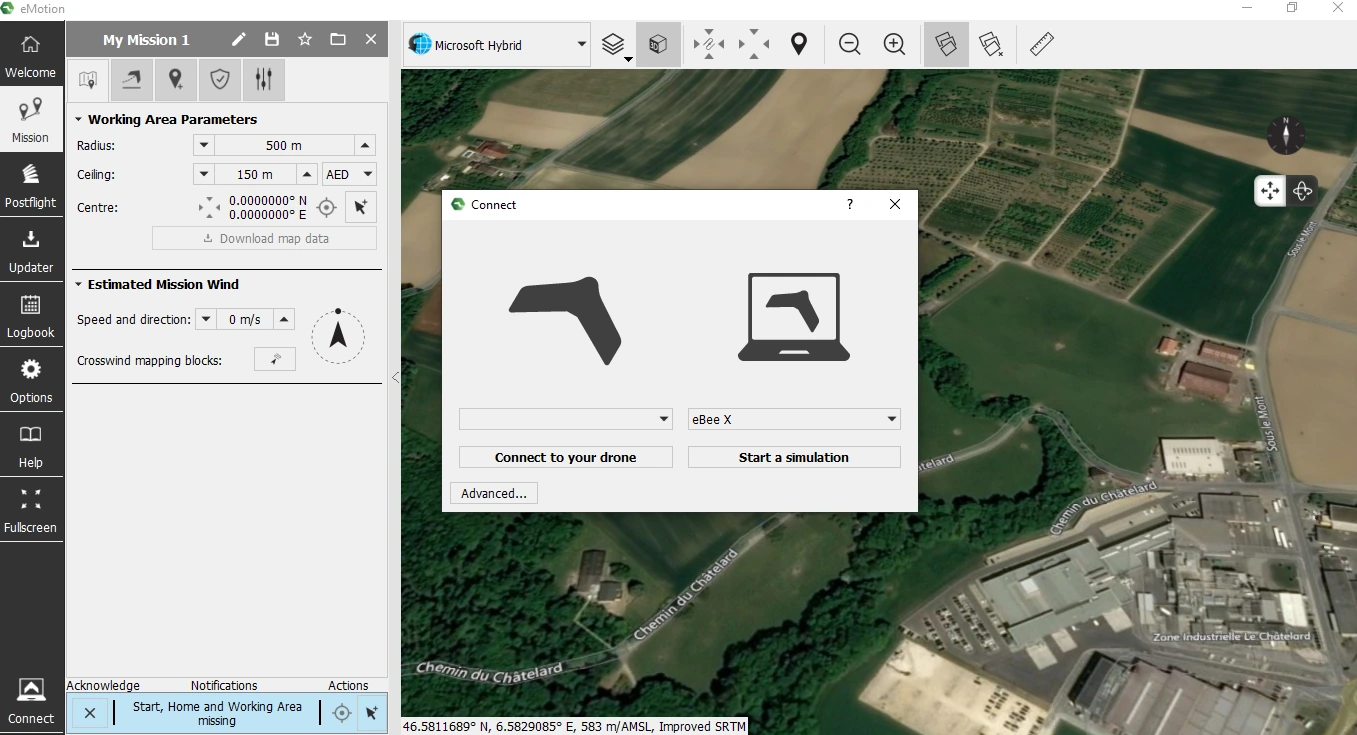
Pulse el botón Conectar. Conéctese al dron pulsando Conéctese a su dron o simule su vuelo pulsando Iniciar una simulación.
-
Active su licencia RTK/PPK en la pestaña Actualizar a eBee plus del panel del Dron. Para activar una licencia para simulación, marque la casilla Activar la actualización del simulador.
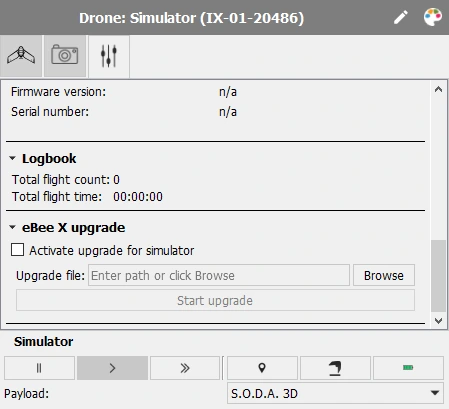
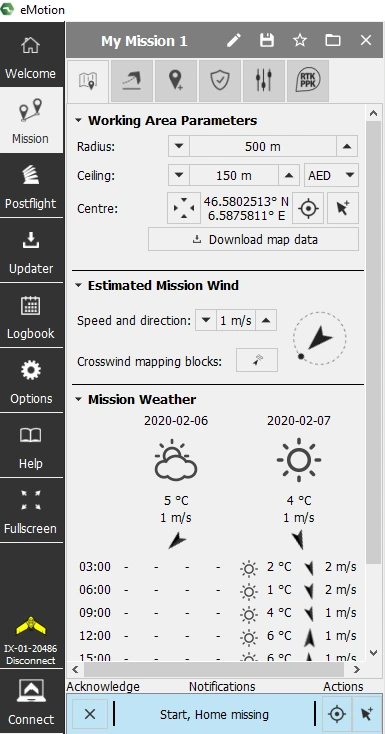
Ahora puede ver la pestaña RTK activada en su panel de Misión a la izquierda.
-
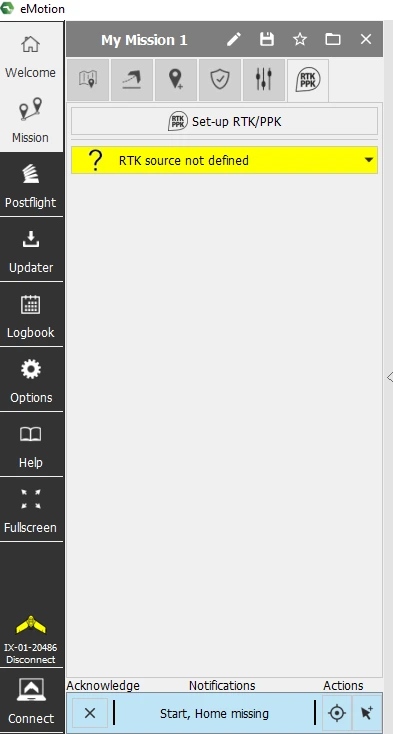
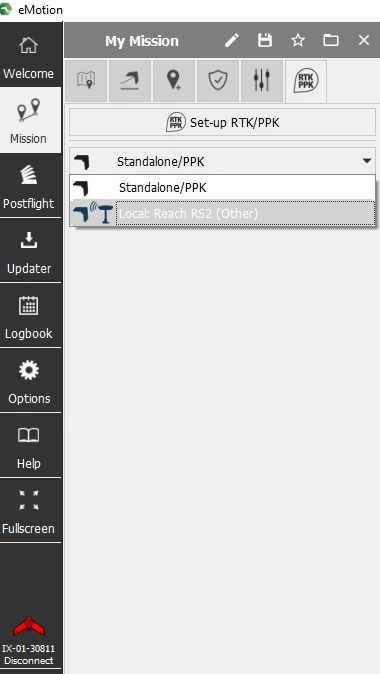
Vaya a la pestaña RTK del panel Misión (Mission).
-
Pulse Configurar RTK/PPK para configurar su base.
-
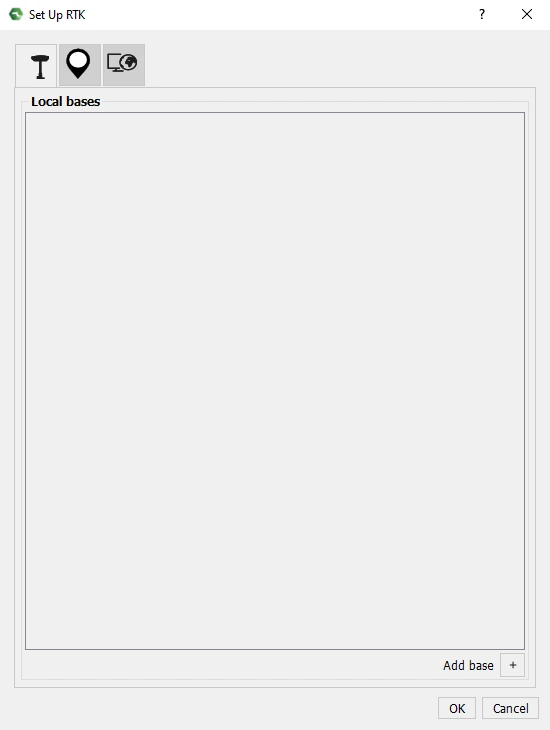
En la ventana abierta, puede especificar una estación base, puntos de referencia o un SRV. Para configurar la estación base, pulse Añadir base + en la pestaña Base.
-
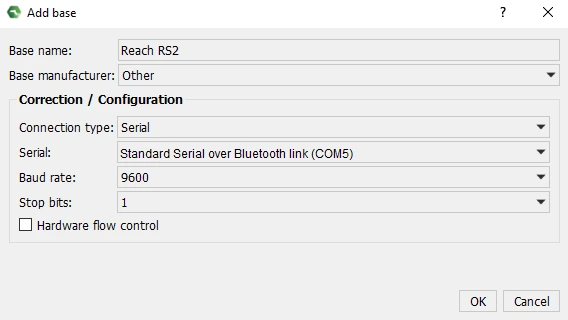
Establezca Reach RS2/RS2+ en un nombre de Base.
-
Establezca Otro (Other) a un Base del fabricante (Base manifacturer).
-
Establecer el Tipo de conexión (Connection type) a Serie (Serial).
-
Elija el puerto COM que marcó en el paso anterior.
-
Establezca la misma velocidad de transmisión para todos los dispositivos conectados.
-
Pulse Aceptar.
- Una vez configurada la conexión, puede elegir la estación base en la pestaña RTK.
-
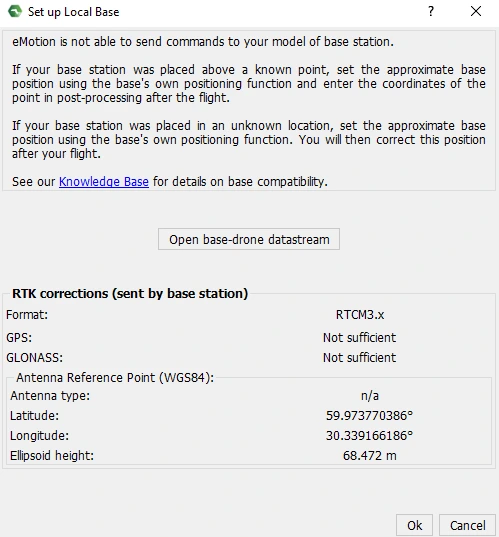
Pulse en la estación base elegida para ver la ventana Establecer una base local.
-
Pulse Flujo de datos base-drone abierto.
Si está probando la configuración en el interior, los campos GPS y GLONASS mostrarán el mensaje No es suficiente.
- Compruebe la posición base que recibe el dron.
- Vaya al panel del Dron. En la pestaña Instrumentos, puede ver que el dron proporciona una precisión a nivel centimétrico y el modo es RTK-fijo.
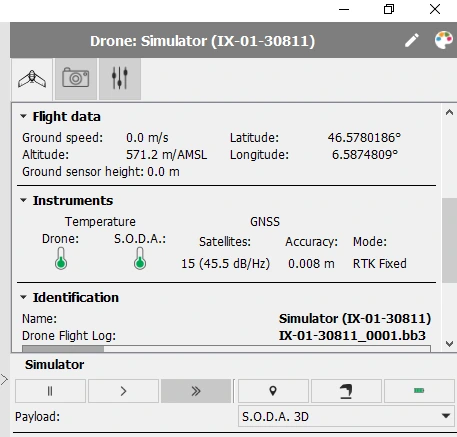
Ya ha configurado correctamente las correcciones RTK en su dron desde Reach RS2/RS2+.