Configurazione base e rover
Introduzione
Questo tutorial mostrerà come configurare due dispositivi Reach M2 o Reach M+ come base e rover con il collegamento di correzione tramite Wi-Fi.
Per impostare le correzioni della base NTRIP, seguire le fasi della guida Lavorare con il servizio NTRIP.
Rinominare i dispositivi Reach
Per impostazione predefinita, ogni Reach ha lo stesso nome. Per distinguere la base dal rover sul campo, è necessario rinominarli. Seguire i passaggi riportati di seguito:
- Connettersi al Reach che si desidera utilizzare come base.
Quando ci si connette al proprio Reach, tutti i LED lampeggeranno simultaneamente. Se è necessario far lampeggiare i LED durante un rilievo, toccare la cella con il nome del ricevitore nella schermata Receivers (Ricevitori) e accedere al pulsante Flash LEDs (LED lampeggianti).
-
Andare su Settings (Impostazioni) e toccare Receiver info (Info sul ricevitore).
-
In Receiver and hotspot name (Nome del ricevitore e dell'hotspot), modificare il nome del proprio Reach in reach-base.
Il nome inserito verrà utilizzato anche come etichetta della rete Wi-Fi quando Reach è in modalità hotspot.
-
Premere Save (Salva).
-
Fare lo stesso con il secondo Reach. Tuttavia, utilizzare il nome reach-rover invece di reach-base.
Configurazione della stazione base
Ora è necessario configurare le impostazioni RTK sulla base. Seguire i passaggi riportati di seguito:
-
Connettersi all'unità base.
-
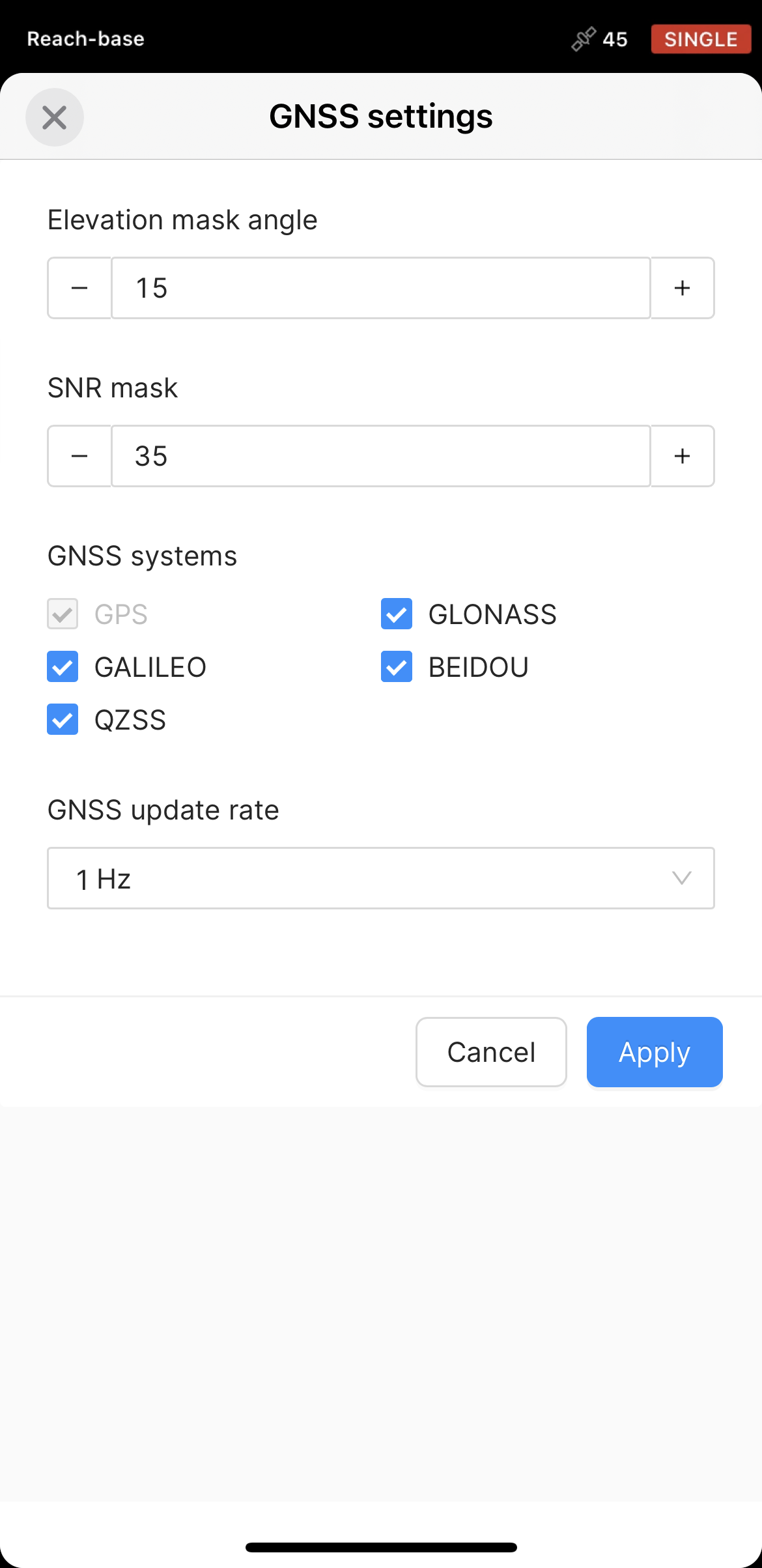
Andare su Settings (Impostazioni) e toccare GNSS settings (Impostazioni GNSS). Selezionare i sistemi satellitari a seconda del dispositivo Reach utilizzato:
- Reach M2
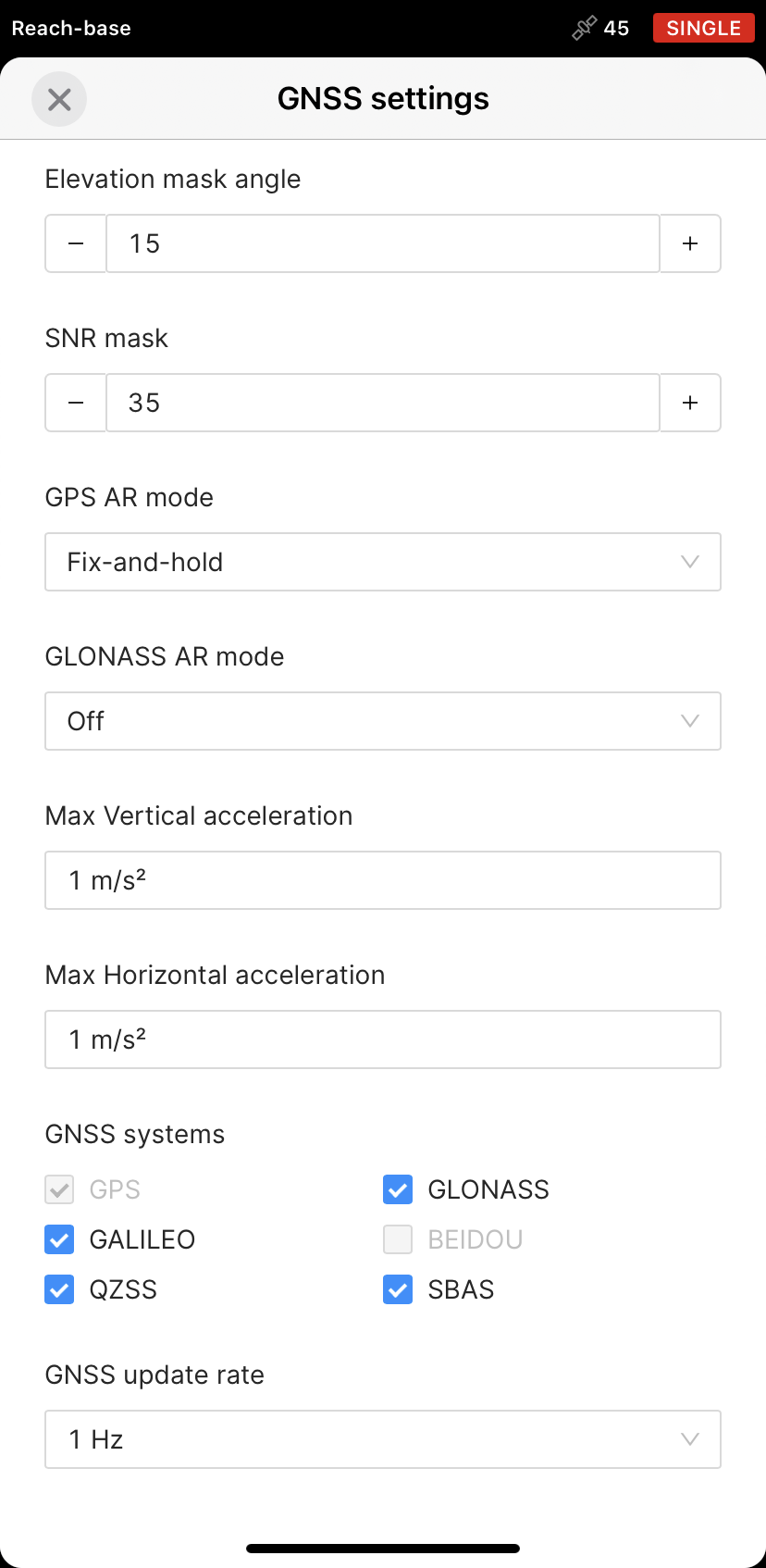
- Reach M+
Scegliere ciascuno dei sistemi satellitari. Impostare la frequenza di aggiornamento GNSS a 1 Hz.
Scegliere GLONASS o BeiDou a seconda della propria posizione. Mentre GLONASS copre la maggior parte del mondo, BeiDou potrebbe essere più efficiente nella regione Asia-Pacifico. Selezionare il resto dei sistemi satellitari. Impostare la frequenza di aggiornamento GNSS a 1 Hz.
Dopo aver configurato le impostazioni RTK, è necessario configurare la trasmissione delle correzioni RTK tramite TCP. Seguire i passaggi riportati di seguito:
-
Tornare alla schermata Receivers (Ricevitori) e toccare Base output (Output base).
-
Scegliere TCP server.
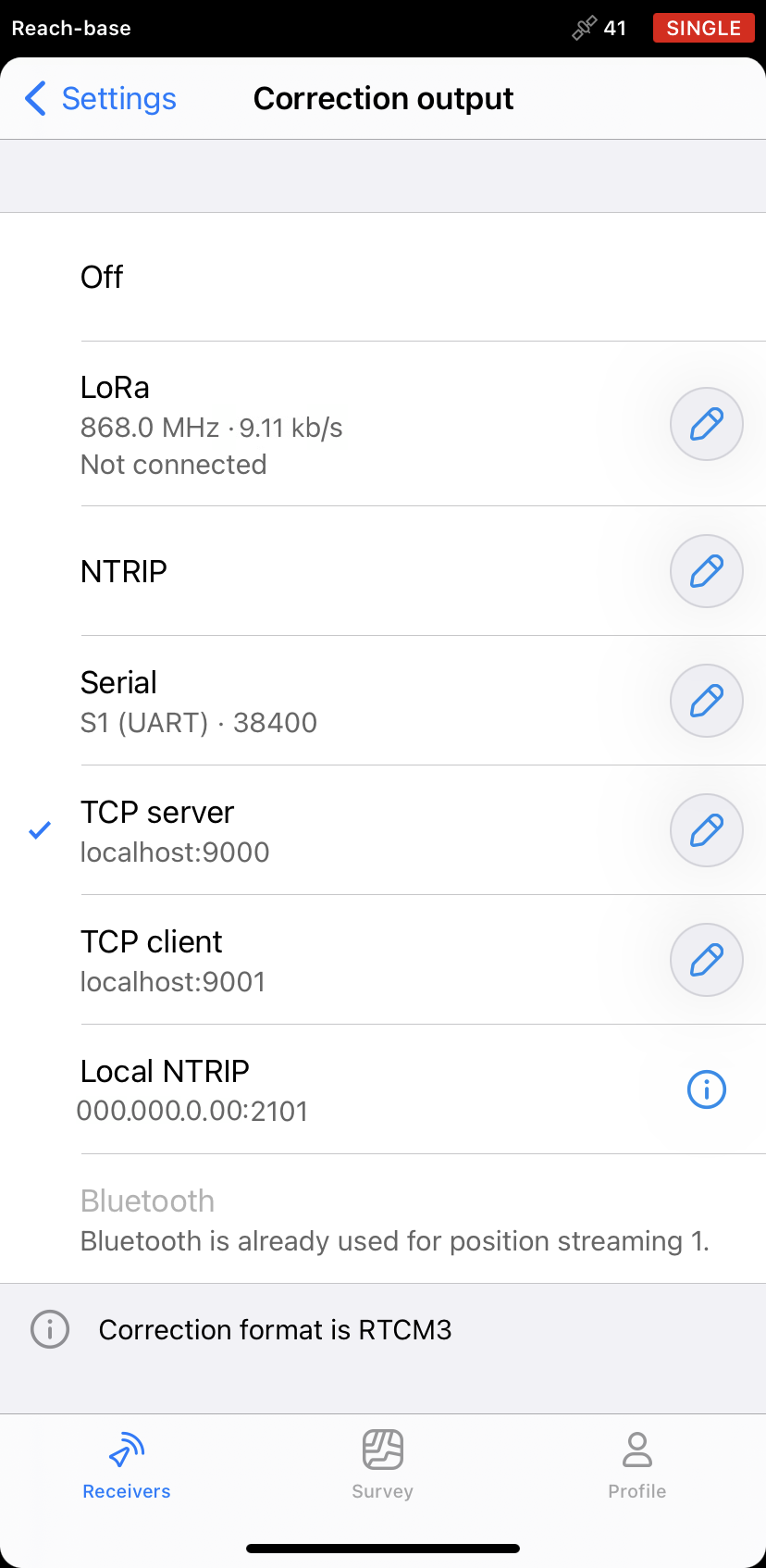
Per impostazione predefinita, la base sarà configurata come localhost sulla porta TCP 9000.
-
Andare alla schermata Base settings (Impostazioni base) e attendere che la base calcoli la media della sua posizione.
-
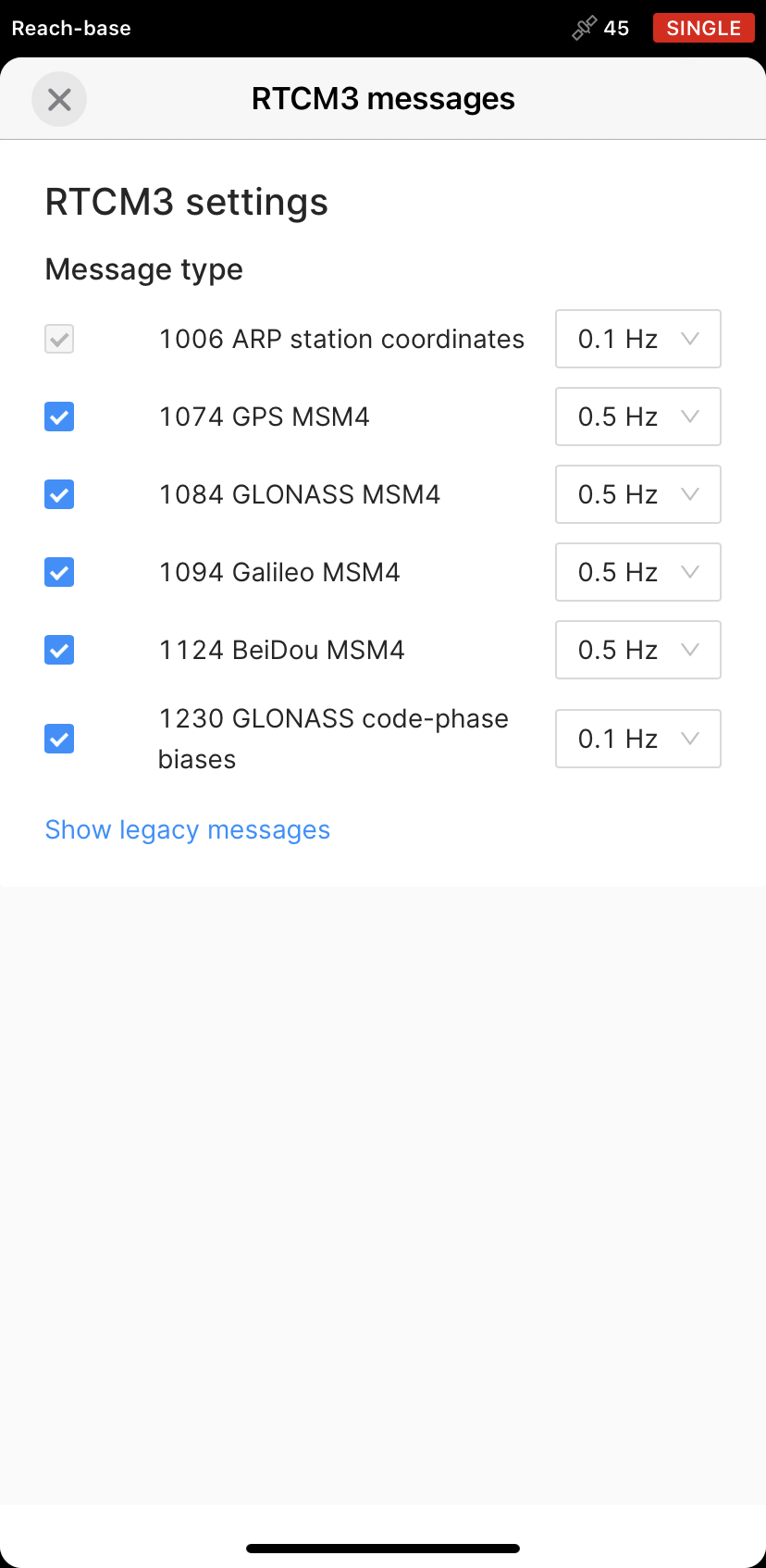
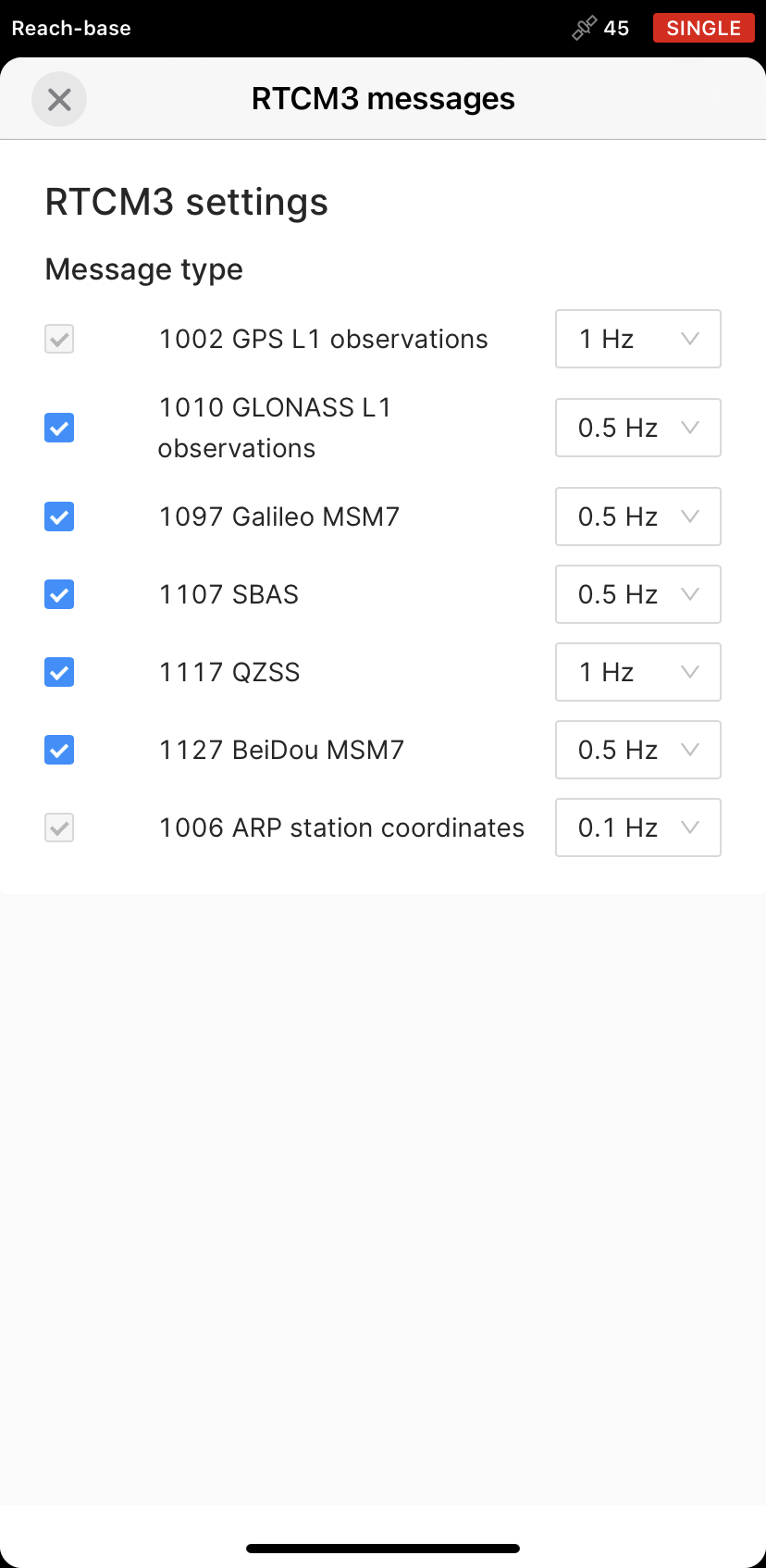
Nell'elenco dei messaggi RTCM3, selezionare i messaggi da trasmettere a seconda del dispositivo Reach utilizzato:
- Reach M2
- Reach M+
Selezionare l'output di coordinate della stazione ARP a 0.1 Hz, messaggi MSM4 a 1 Hz e bias codice-fase GLONASS a 0.1 Hz.
Selezionare l'output di osservazioni GPS L1 a 1 Hz, osservazioni GLONASS L1 a 0.5 Hz, Galileo MSM7 a 0.5 Hz, SBAS a 0.5 Hz, QZSS a 1 Hz, BeiDou a 0.5 Hz e coordinate della stazione ARP a 0.1 Hz.
Configurazione del rover
Una volta pronta la base, è necessario configurare le impostazioni RTK sul rover. Seguire i passaggi riportati di seguito:
-
Connettersi all'unità rover.
-
Andare su Settings (Impostazioni) e toccare GNSS settings (Impostazioni GNSS).
-
Selezionare gli stessi sistemi GNSS della base e impostare la frequenza di aggiornamento GNSS a 5 Hz. Applicare le modifiche.
Una volta pronta la base, è necessario configurare le impostazioni RTK sul rover. Seguire i passaggi riportati di seguito:
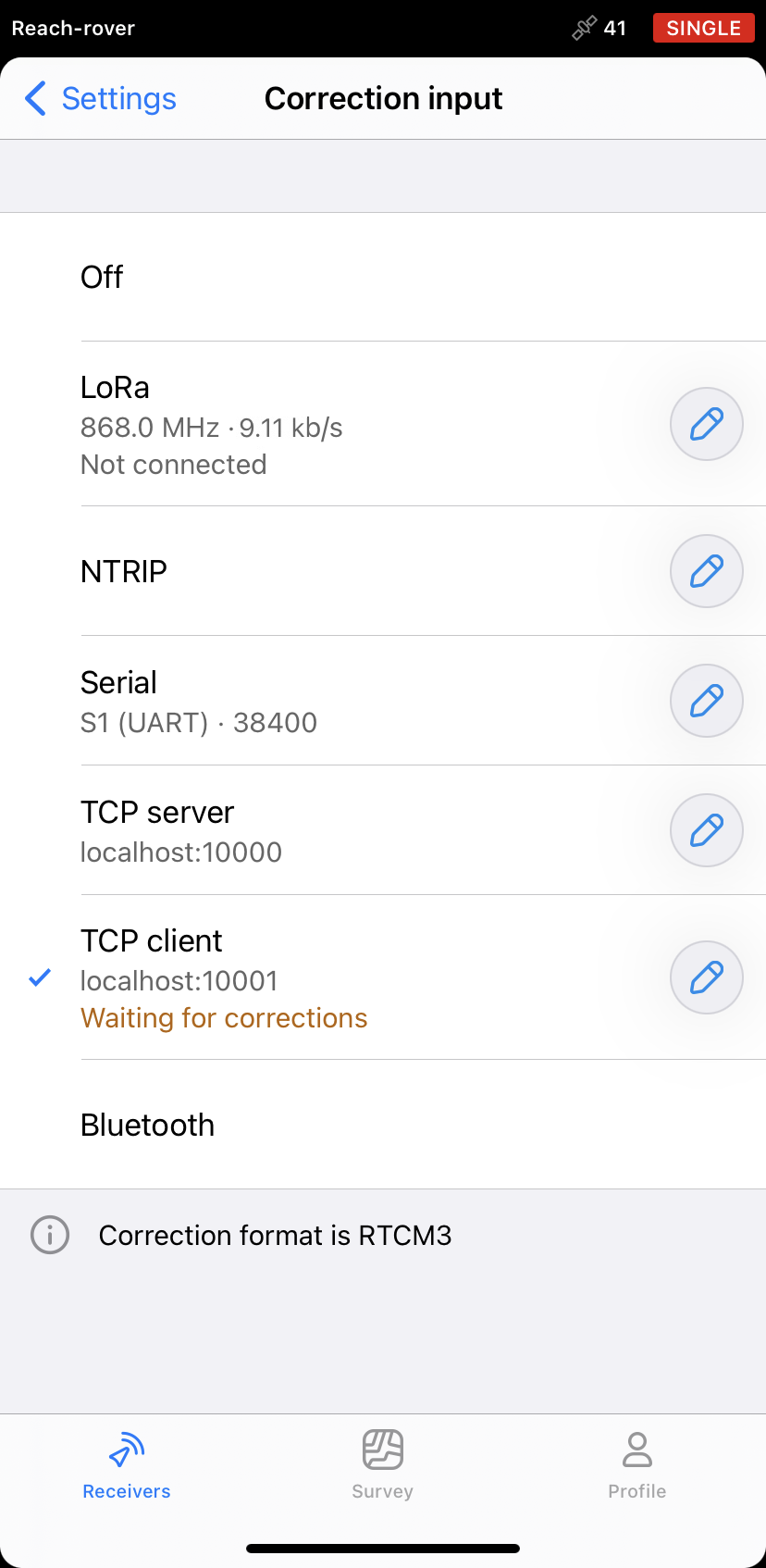
- Tornare alla schermata Receivers (Ricevitori). Andare su Correction input (Correzione in ingresso) e scegliere Client TCP.
-
Aggiungere l'indirizzo IP della base nel campo Address (Indirizzo).
-
Aggiungere la porta di correzione della base nel campo Port.
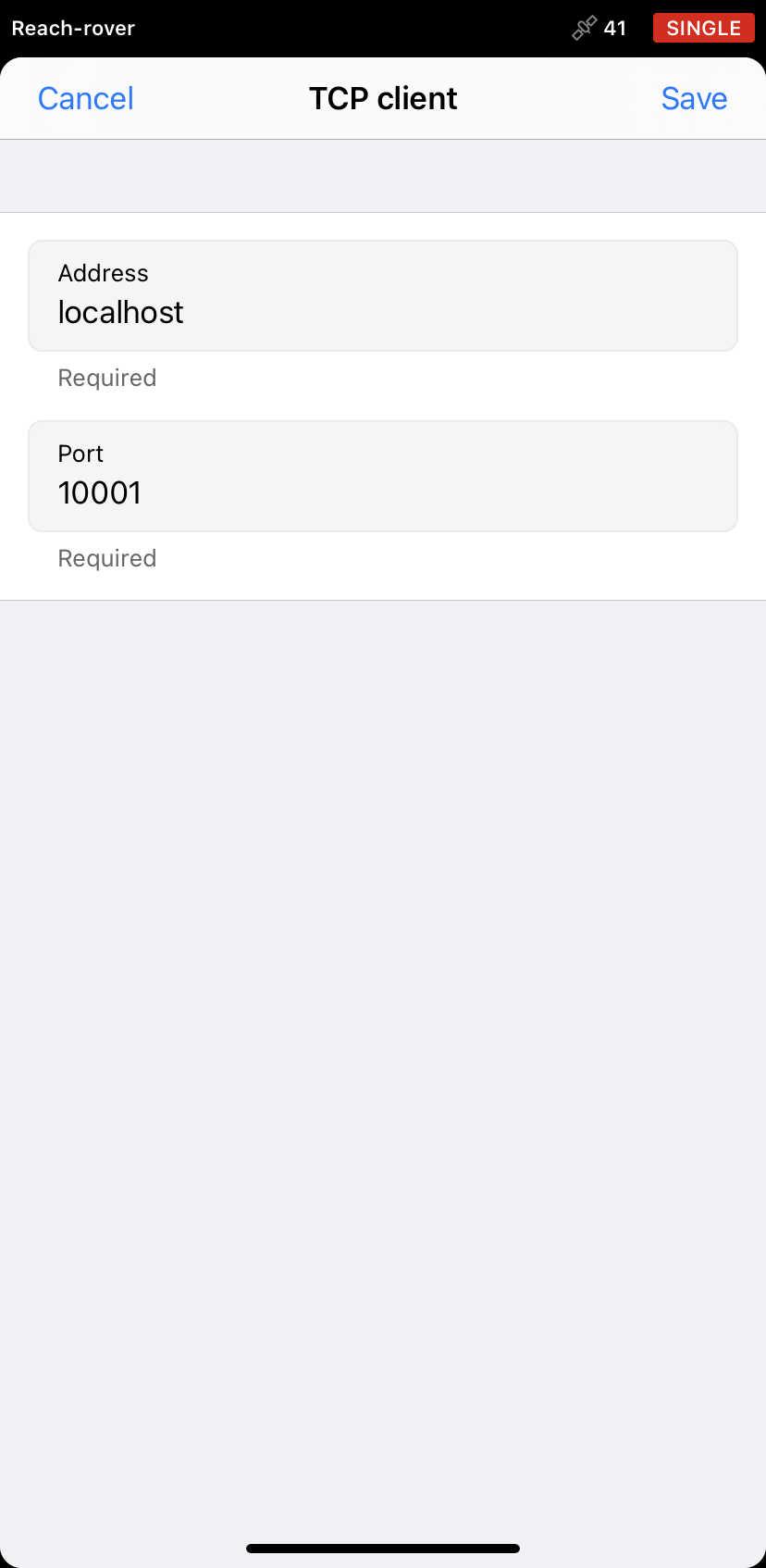
-
Toccare Save (Salva) per applicare le impostazioni.
-
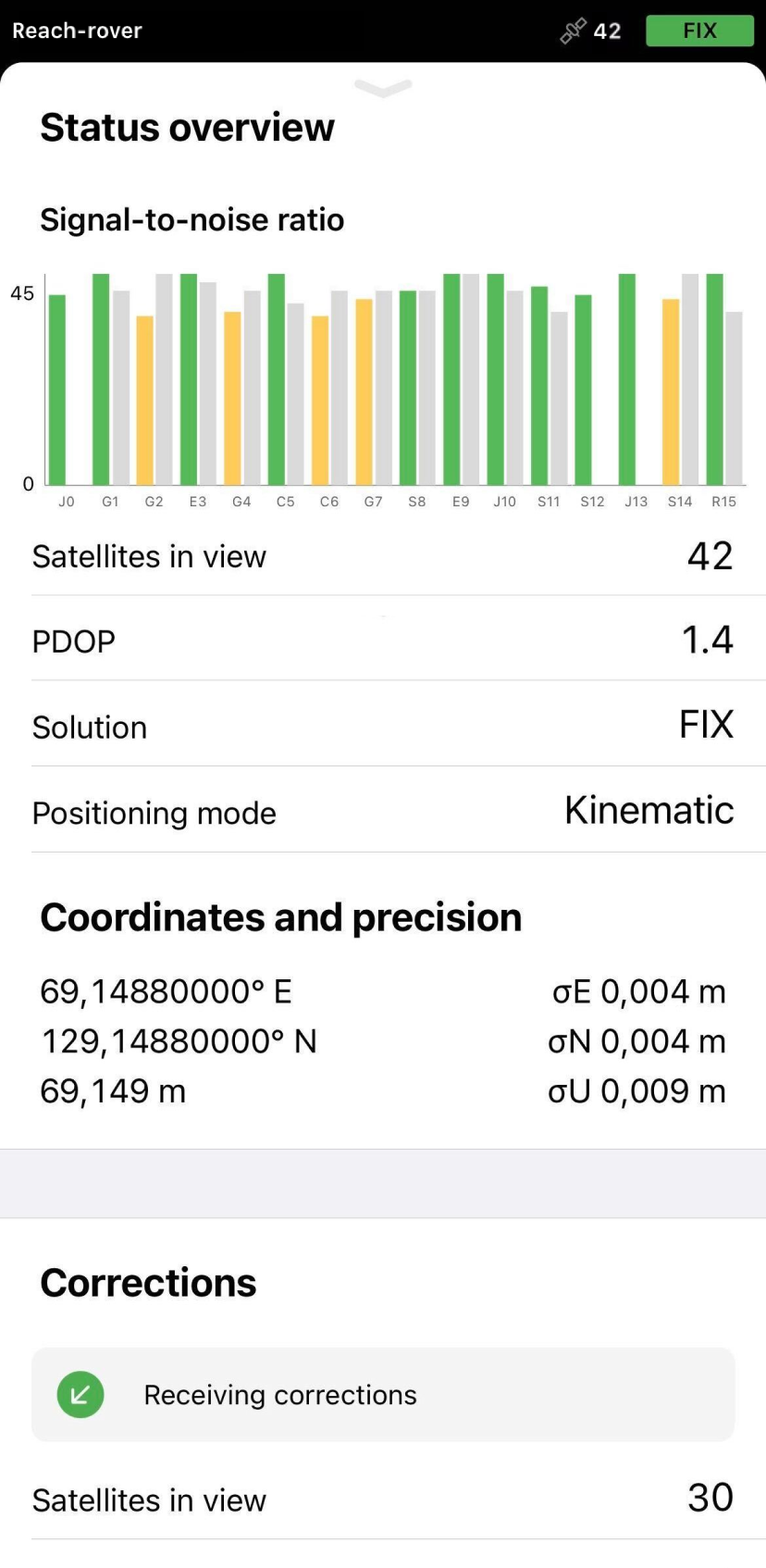
Andare alla schermata Status (Stato). Se tutto è configurato correttamente, verrà visualizzata la notifica Receiving corrections (Ricezione delle correzioni).
Visualizzare i risultati
È possibile visualizzare lo stato attuale della soluzione nell'angolo in alto a destra dell'app Emlid Flow:
-
SINGLE significa che il rover ha trovato una soluzione basandosi sul proprio ricevitore e le correzioni della base non vengono applicate. La precisione in modalità autonoma è solitamente a livello di alcuni metri.
-
FLOAT significa che il rover riceve le correzioni dalla base ma non è in grado di risolvere tutte le ambiguità; in questo caso, la precisione è solitamente a livello submetrico.
-
FIX significa che il rover, utilizzando le correzioni della base, ha risolto le ambiguità nel calcolo della sua posizione e ha raggiunto la soluzione con una precisione a livello centimetrico.
Dopo un breve periodo di tempo, il rover ottiene una soluzione fissa. In ambienti ottimali, ci vorranno un paio di minuti per ottenere una soluzione fissa. In condizioni difficili, potrebbe essere necessario un po' più di tempo. Una volta che il rover ottiene lo stato FIX, si è pronti per il rilievo.
È inoltre possibile trovare lo stato corrente della soluzione e la propria posizione in tempo reale nella schermata Status (Stato).
Per maggiori informazioni sul posizionamento dei ricevitori, consultare la guida Posizionamento dell'antenna.