Configuration de la base et du rover
Introduction
Ce tutoriel vous montrera comment configurer deux appareils Reach M2 ou Reach M+ comme base et rover avec le lien de correction via Wi-Fi.
Pour définir les corrections de base NTRIP, suivez les étapes du guide Utilisation du service NTRIP.
Renommer les appareils Reach
Par défaut, chaque Reach a le même nom. Pour distinguer la base et le rover sur le terrain, vous devez les renommer. Suivez les étapes ci-dessous :
- Connectez-vous au Reach que vous souhaitez utiliser comme base.
Lorsque vous vous connectez à votre Reach, toutes les LED clignoteront simultanément. Si vous avez besoin de faire clignoter les LED pendant un levé, appuyez sur la case avec le nom de votre récepteur sur l'écran Receivers (Récepteurs) et accédez au bouton Flash LEDs (Faire clignoter les LED).
-
Allez dans Settings (Paramètres) et appuyez sur Receiver info (Infos du récepteur).
-
Dans Receiver and hotspot name (Nom du récepteur et du point d'accès), changez le nom de votre Reach en reach-base.
Le nom que vous entrez sera également utilisé comme étiquette de réseau Wi-Fi lorsque Reach est en mode point d'accès.
-
Appuyez sur Save (Enregistrer).
-
Faites de même avec le second Reach. Cependant, utilisez le nom reach-rover au lieu de reach-base.
Configurer la station de base
Vous devez maintenant configurer les paramètres RTK sur la base. Suivez les étapes ci-dessous :
-
Connectez-vous à l'unité de base.
-
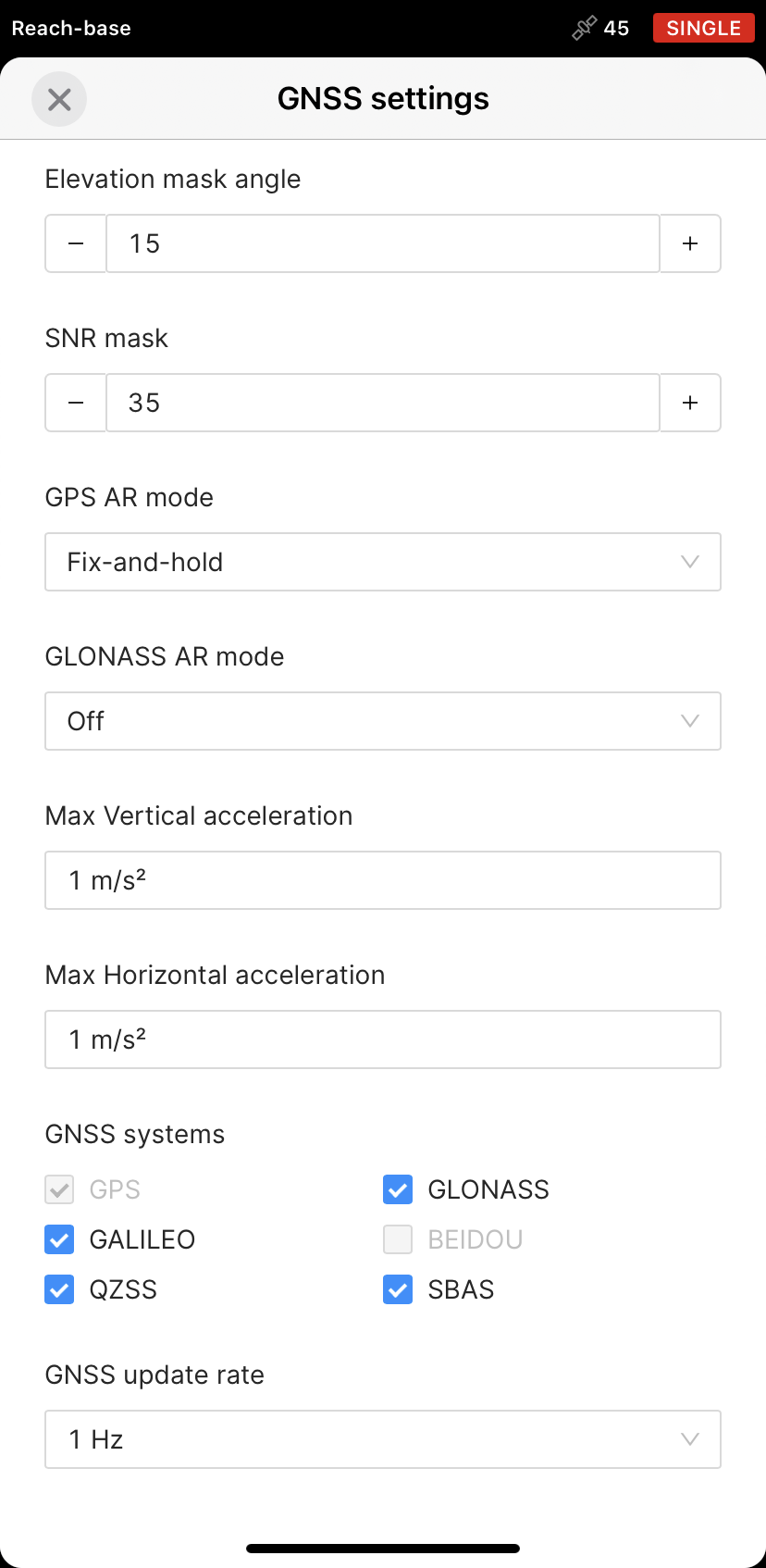
Allez dans Settings (Paramètres), appuyez sur GNSS settings (Paramètres GNSS). Sélectionnez les systèmes satellites en fonction du Reach utilisé :
- Reach M2
- Reach M+
Choisissez chacun des systèmes de satellites. Réglez la fréquence de mise à jour GNSS à 1 Hz.
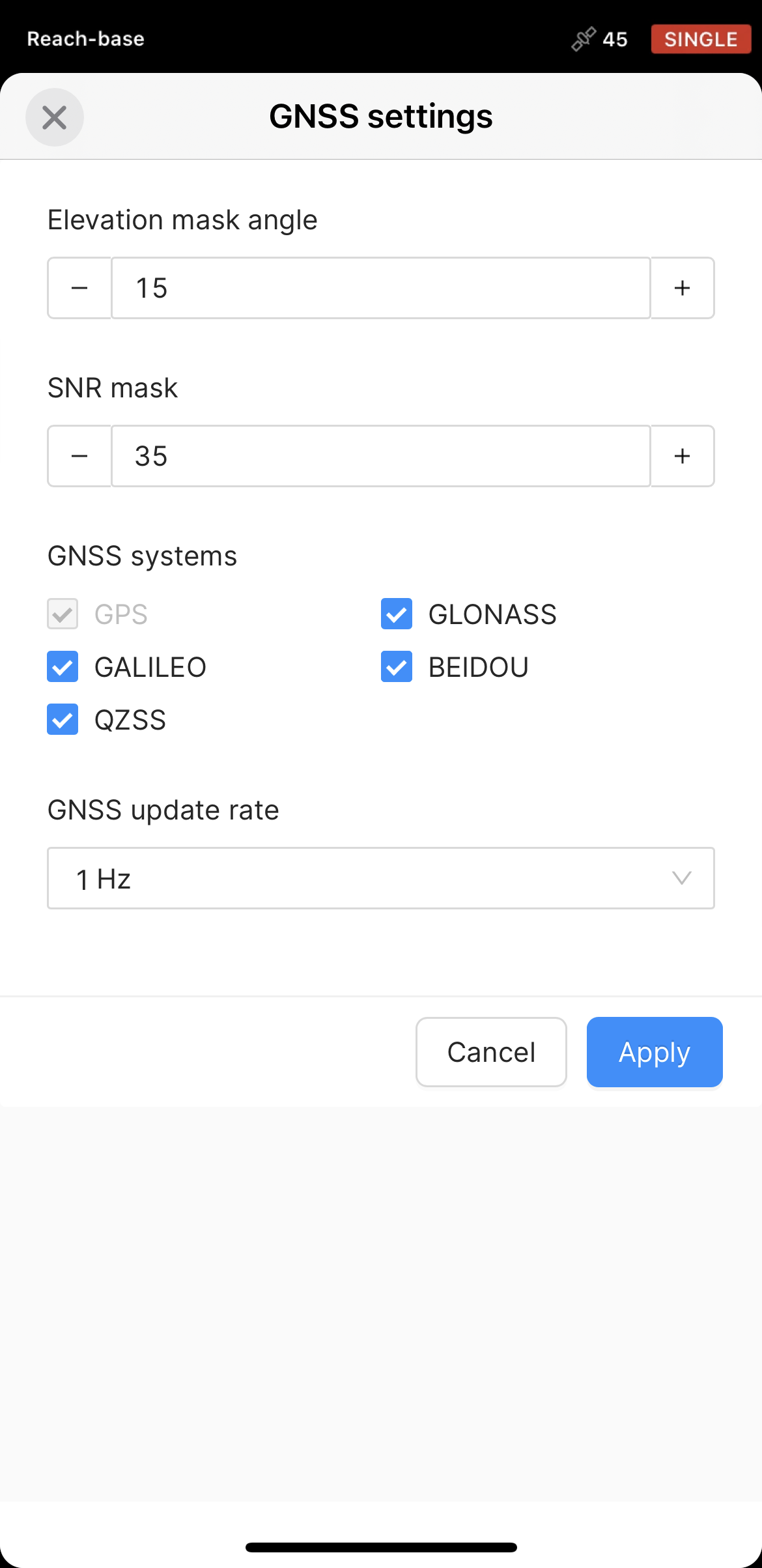
Choisissez GLONASS ou BeiDou en fonction de votre emplacement. Bien que GLONASS couvre la majeure partie du monde, BeiDou peut être plus efficace dans la région Asie-Pacifique. Choisissez le reste des systèmes satellites. Réglez la fréquence de mise à jour du GNSS à 1 Hz.
Après avoir configuré les paramètres RTK, vous devez configurer la diffusion des corrections RTK via TCP. Suivez les étapes ci-dessous :
-
Retournez à l'écran Receivers (Récepteurs) et appuyez sur Base output (Sortie de base).
-
Choisissez TCP Server (Serveur TCP).
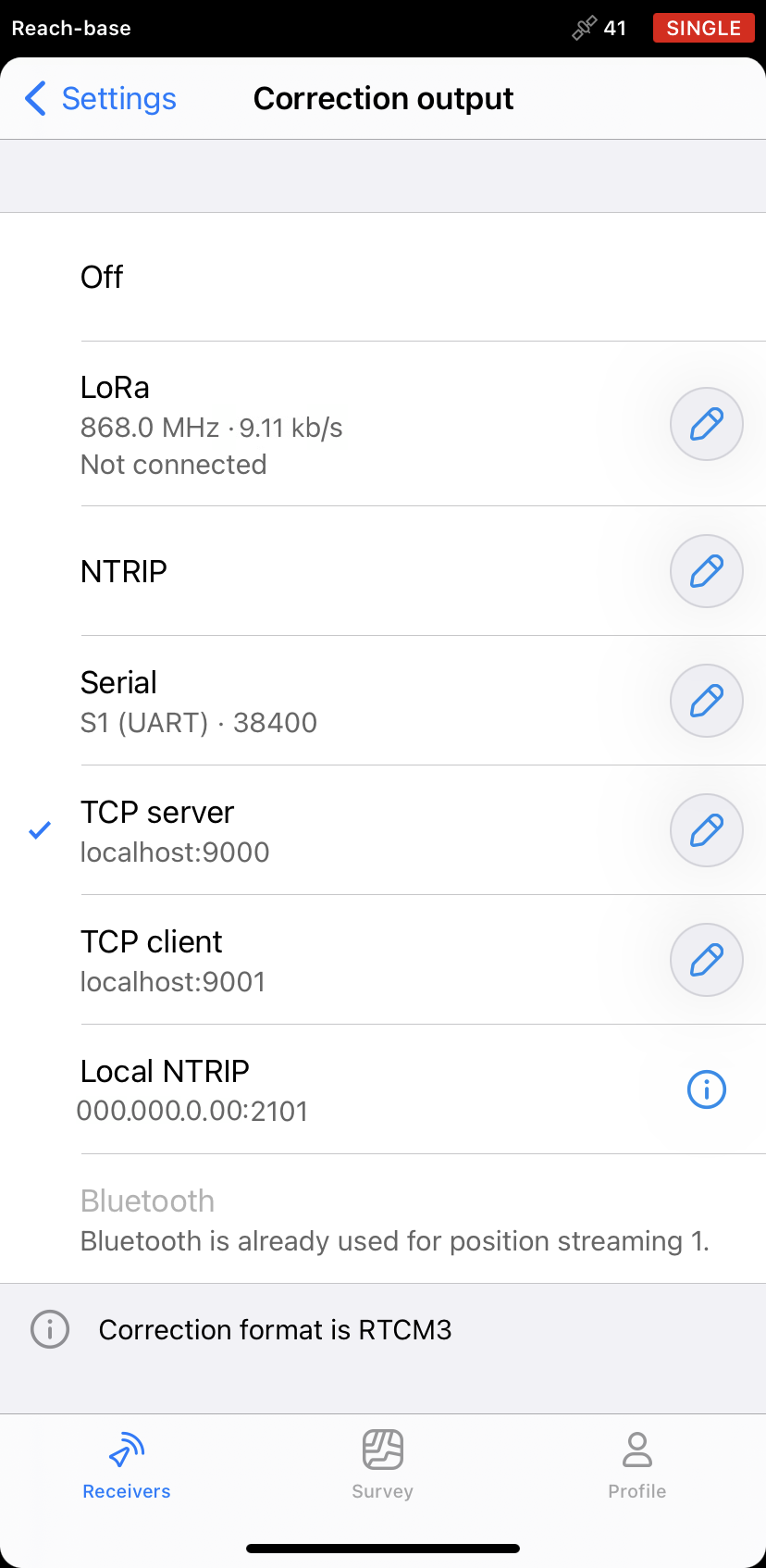
Par défaut, la base sera configurée comme un hôte local sur le port TCP 9000.
-
Allez à l'écran Base settings (Paramètres de base) et attendez que la base fasse la moyenne de sa position.
-
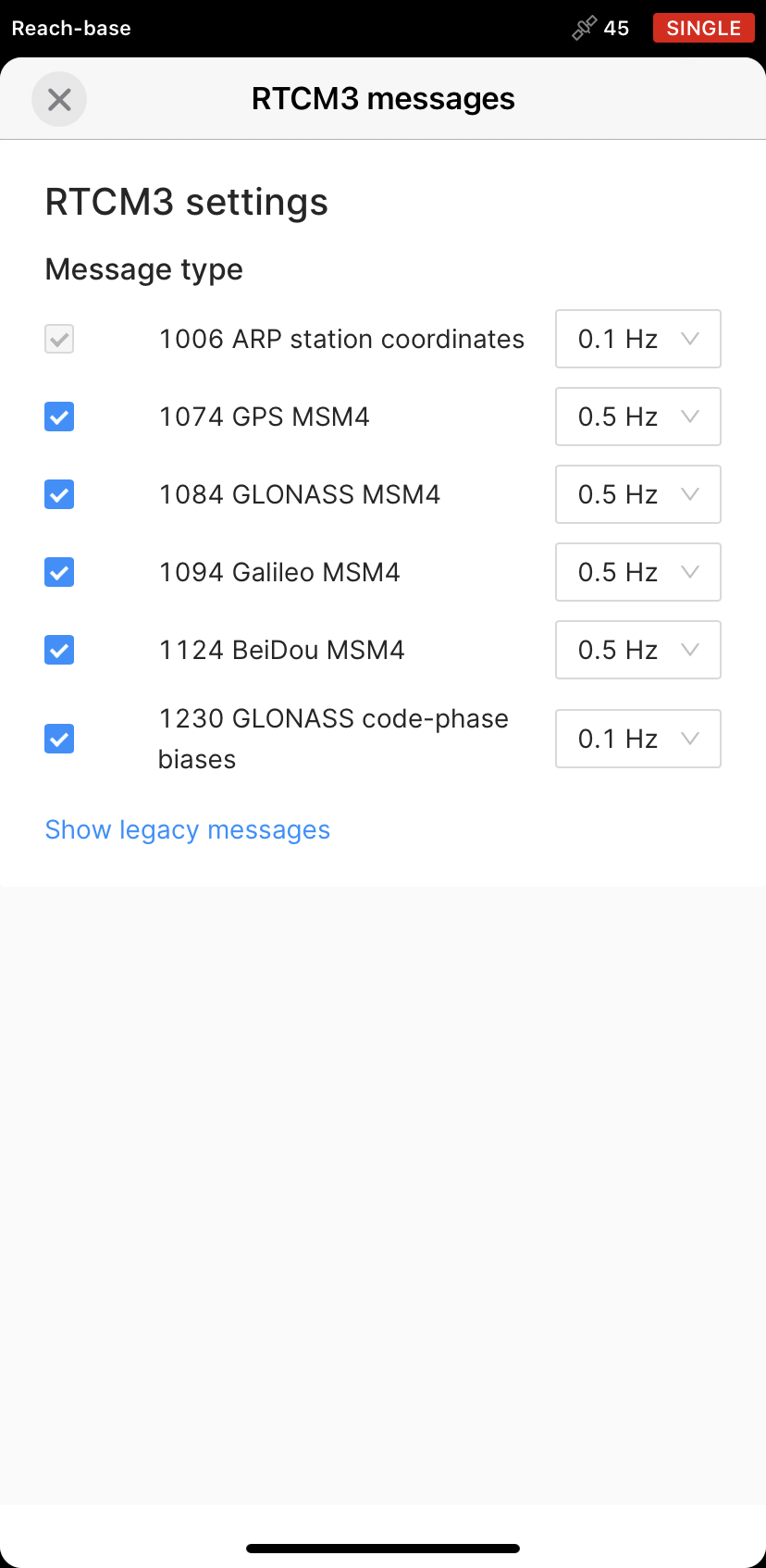
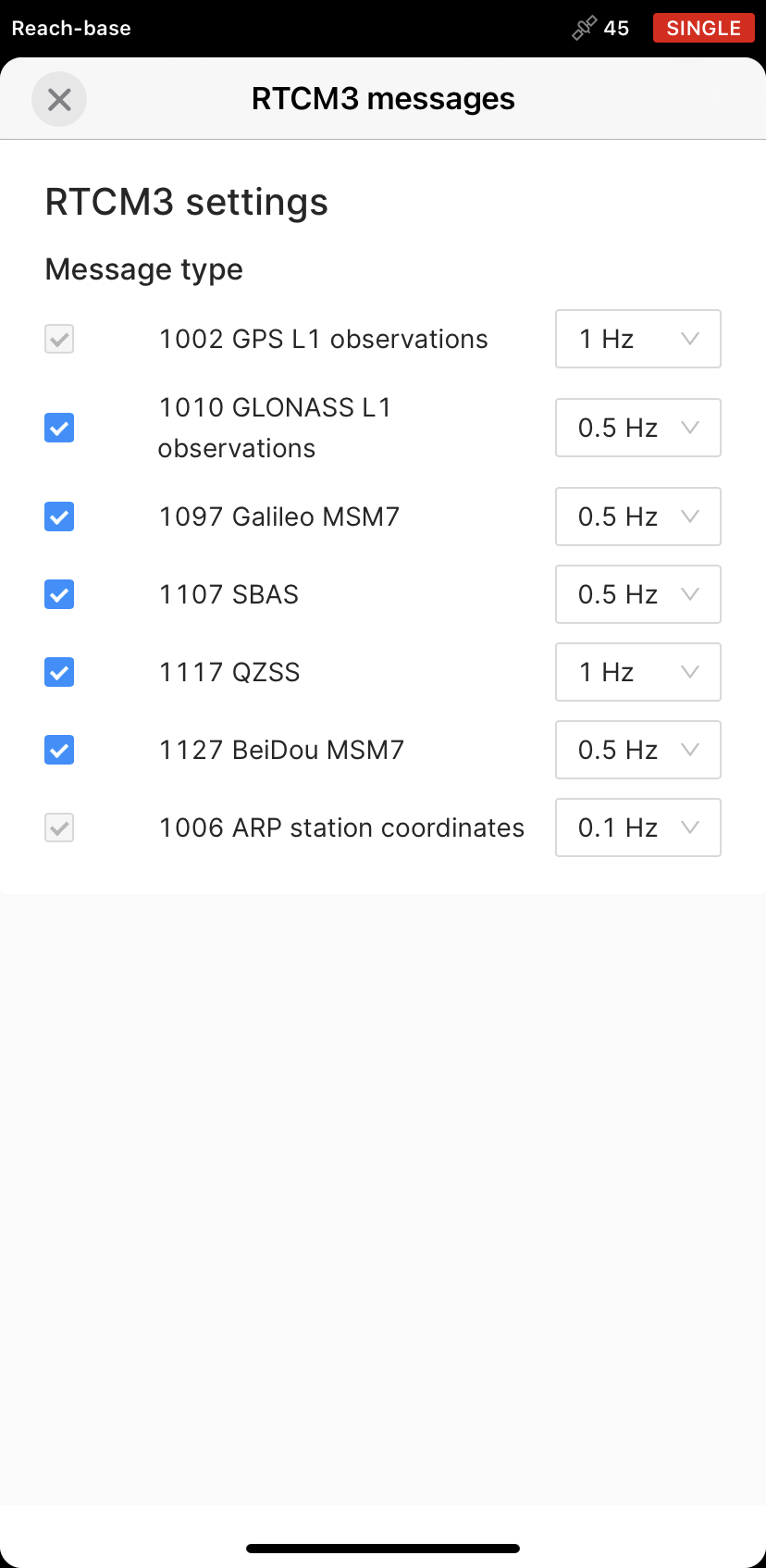
Dans la liste des messages RTCM3, sélectionnez les messages à émettre en fonction du Reach utilisé :
- Reach M2
- Reach M+
Sélectionnez pour émettre les coordonnées de la station ARP à 0,1 Hz, les messages MSM4 à 1 Hz et les décalages de phase de code GLONASS à 0,1 Hz.
Sélectionnez pour émettre les observations GPS L1 à 1 Hz, les observations GLONASS L1 à 0,5 Hz, Galileo MSM7 à 0,5 Hz, SBAS à 0,5 Hz, QZSS à 1 Hz, BeiDou à 0,5 Hz et les coordonnées de la station ARP à 0,1 Hz.
Configurer le rover
Lorsque vous êtes prêt avec la base, vous devez configurer les paramètres RTK sur le rover. Suivez les étapes ci-dessous :
-
Connectez-vous à l'unité rover.
-
Allez dans Settings (Paramètres), appuyez sur GNSS settings (Paramètres GNSS).
-
Sélectionnez les mêmes systèmes GNSS que pour la base, et réglez la fréquence de mise à jour GNSS à 5 Hz. Appliquer les modifications.
Lorsque vous êtes prêt avec la base, vous devez configurer les paramètres RTK sur le rover. Suivez les étapes ci-dessous :
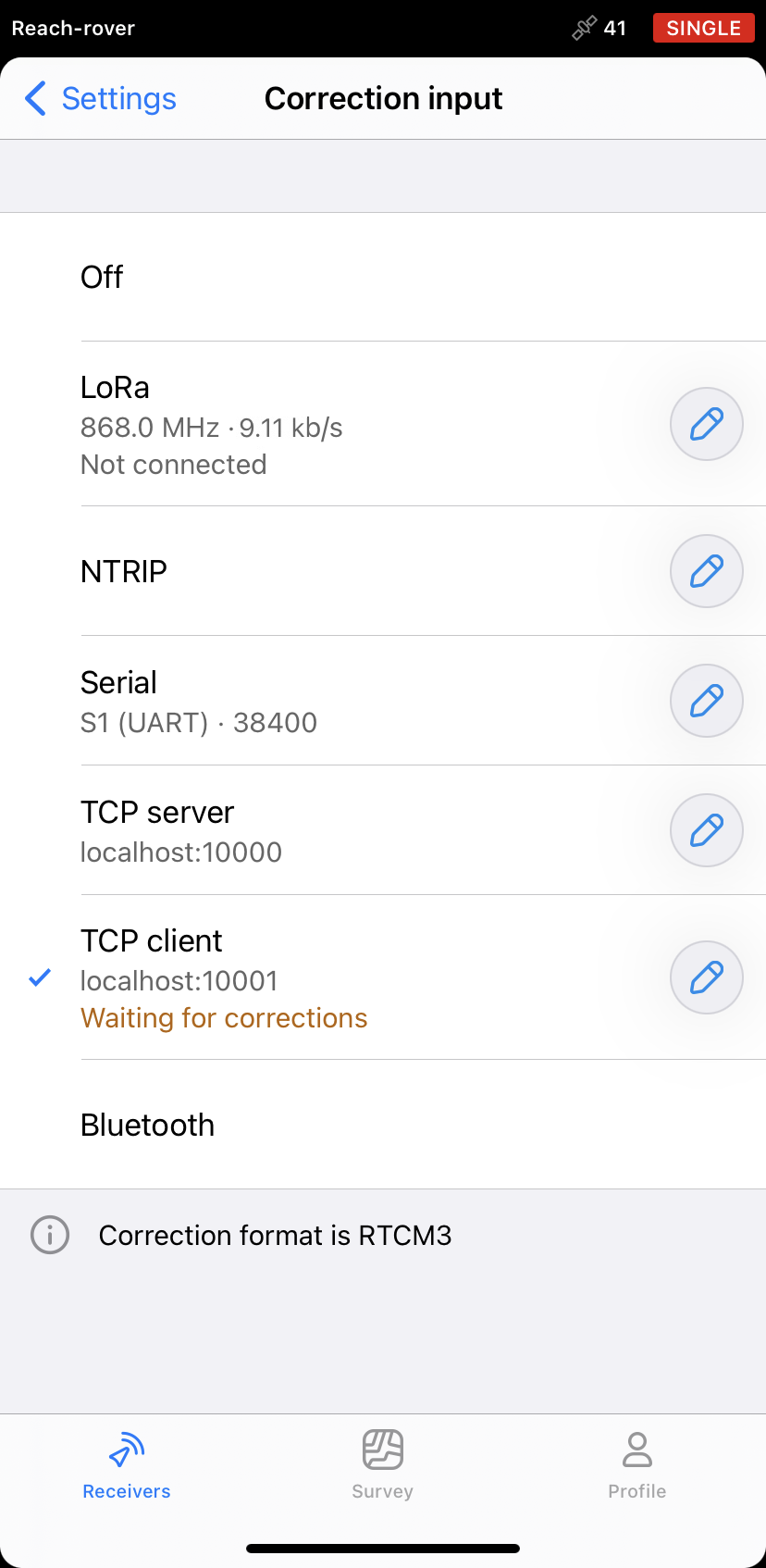
- Retournez à l'écran Receivers (Récepteurs). Allez à Correction input (Entrée de correction) et choisissez TCP client (Client TCP).
-
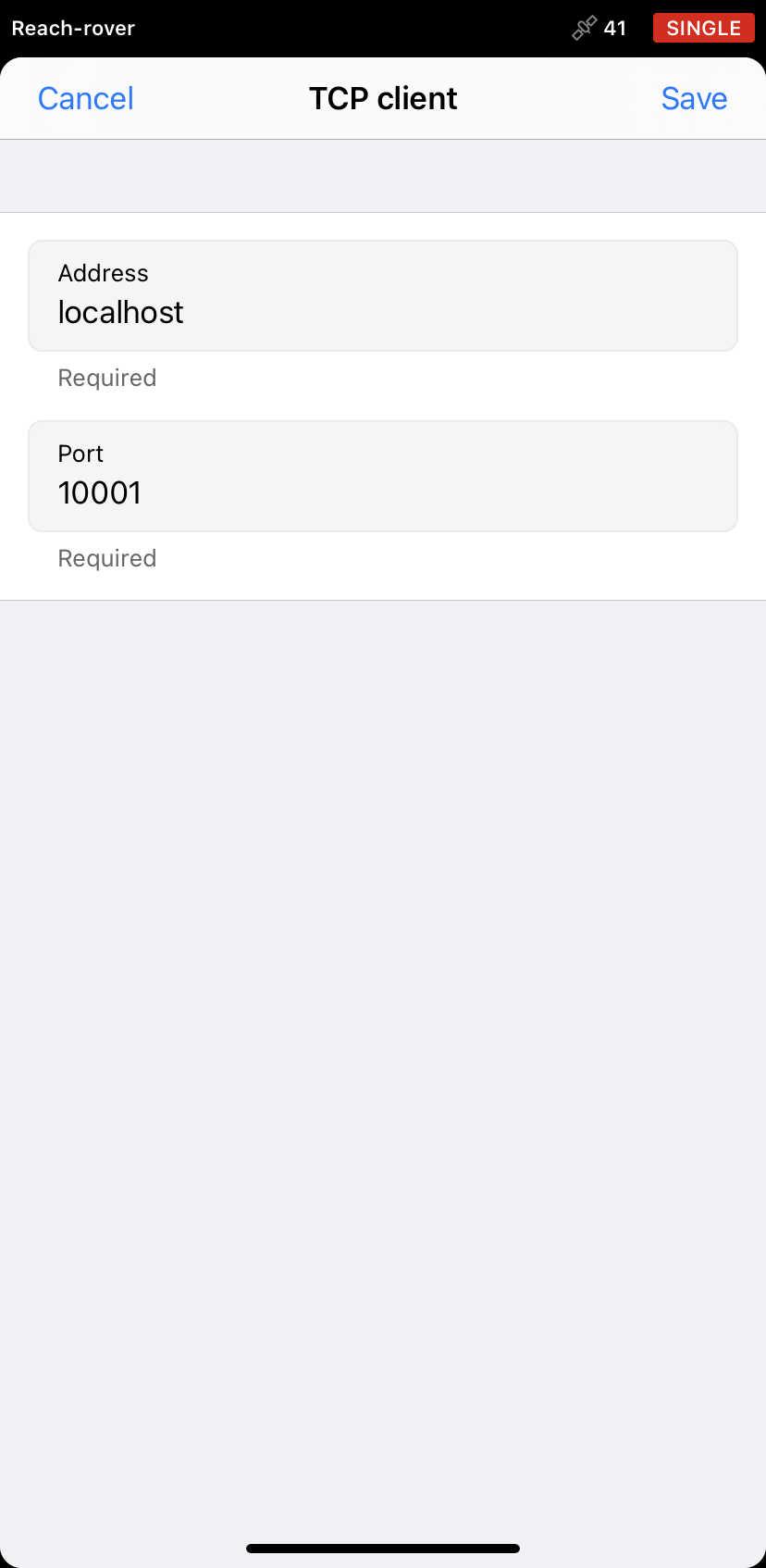
Ajoutez l'adresse IP de la base dans le champ Address (Adresse).
-
Ajoutez le port de correction de la base dans le champ Port.
-
Appuyez sur Save (Enregistrer) pour appliquer les paramètres.
-
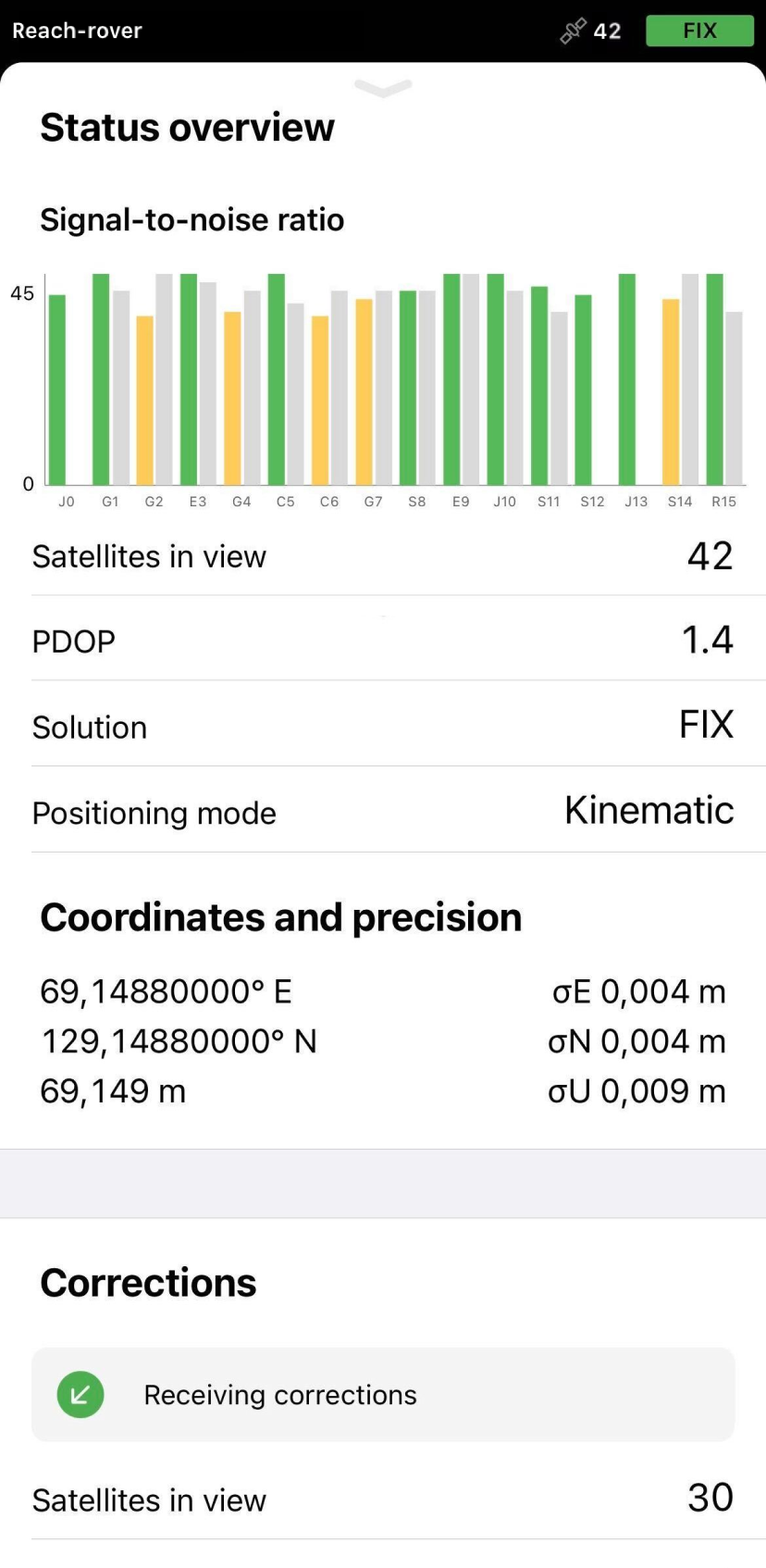
Allez à l'écran Status (Statut). Si tout est configuré correctement, vous verrez la notification Receiving corrections (Réception des corrections).
Voir les résultats
Vous pouvez voir l'état actuel de la solution dans le coin supérieur droit de l'application Emlid Flow :
-
SINGLE signifie que le rover a trouvé une solution en s'appuyant sur son propre récepteur et que les corrections de la base ne sont pas appliquées. La précision en mode autonome est généralement de l'ordre de plusieurs mètres.
-
FLOAT signifie que le rover reçoit des corrections de la base mais ne peut pas résoudre toutes les ambiguïtés, et dans ce cas, la précision est généralement de l'ordre de moins d'un mètre.
-
FIX signifie que le rover utilisant les corrections de la base a résolu les ambiguïtés dans son calcul de position et a atteint une solution avec une précision au niveau centimétrique.
Après une courte période, le rover obtient une solution fixe. Dans de bons environnements, il faudra quelques minutes pour obtenir une solution fixe. Dans des conditions difficiles, cela peut prendre un peu plus de temps. Une fois que le rover obtient FIX, vous êtes prêt pour le nivellement.
Vous pouvez également trouver l'état actuel de la solution ainsi que votre position en temps r�éel sur l'écran Status (Statut).
Pour plus d'informations sur le placement des récepteurs, consultez le guide Placement de l'antenne.