Configuration du kit Reach UAV pour la cartographie PPK
Ce guide explique comment configurer vos récepteurs Reach pour la cartographie PPK avec un drone.
Nous vous recommandons de consulter l'article Comment fonctionne le PPK avant de commencer.
Vue d'ensemble
Pour configurer le kit Reach UAV pour la cartographie PPK, vous aurez besoin des éléments suivants :
- Base Reach RS3/RS2/RS2+ ou Reach RS+
- Rover Reach M2/M+ avec antenne GNSS
- Adaptateur pour sabot (HSA) pour un appareil photo
- Tout appareil photo qui fournit un accès sabot (par exemple, Sony, Canon, Nikon)
Reach RS+ ne peut pas servir de base pour un rover Reach M2 car Reach M2 nécessite des corrections multi-fréquences. Cependant, vous pouvez utiliser Reach RS3/RS2/RS2+ comme base pour Reach M+. Notez que vous n'obtiendrez pas tous les avantages du récepteur multibande dans ce cas. Vous pouvez en savoir plus sur les différences entre les récepteurs monobandes et multibandes dans l'article Monobande VS Multibande.
En outre, vous aurez besoin de quelques Points de contrôle au sol (GCP). Pour placer un GCP, une base et un rover sont nécessaires, ou vous pouvez utiliser un récepteur connecté à un NTRIP.
Dans ce guide, nous nous concentrons principalement sur la partie équipement GNSS de l'intégration. Cependant, vous avez également besoin d'un drone et d'un PC avec une station de contrôle au sol et un logiciel de photogrammétrie. Il y a 2 exigences principales pour le drone :
- La présence ou la possibilité d'installer un appareil photo avec un connecteur de sabot
- Fonctionnalité permettant de déclencher l'appareil photo : par l'appareil photo lui-même ou par le pilote automatique
Configuration matérielle Reach M2/M+
Connexion de Reach M2/M+ à un appareil photo à l'aide d'un HSA
Le HSA permet à Reach M2/M+ d'enregistrer précisément une marque de temps à chaque instant où l'appareil photo prend une photo.
L'appareil photo doit avoir un sabot pour l'intégration avec Reach M2/M+. Si vous utilisez DJI Mavic ou Phantom qui ne fournit pas d'accès sabot, vous pouvez toujours vous en tenir à travailler avec des GCP.
Pour connecter Reach à un appareil photo avec un adaptateur pour sabot, utilisez le câble 5-pin JST-GH fourni avec Reach M2/M+. Branchez le connecteur de sabot dans un sabot d'appareil photo et le connecteur JST-GH dans le port С1 sur Reach M2/M+.


Déclenchement de l'appareil photo
Selon votre application, il existe plusieurs façons de déclencher un appareil photo.
-
Déclenchement via une caméra. Certains appareils photo offrent une fonctionnalité Timelapse qui permet de prendre une photo à intervalles réguliers. Si votre appareil photo prend en charge cette option, nous vous recommandons de l'utiliser car c'est la méthode la plus simple et la plus directe.
astuceChaque appareil photo utilise différents ports pour le déclenchement. Il peut s'agir d'un port USB ou HDMI. Consultez le manuel de l'appareil photo pour savoir comment déclencher votre appareil photo.
-
Déclenchement via le pilote automatique. Il existe plusieurs options de déclenchement de l'appareil photo via les pilotes automatiques :
-
Déclenchement de l'obturateur de l'appareil photo aux points de passage. Le pilote automatique peut déclencher l'obturateur chaque fois que le drone atteint un point de passage. Si vous utilisez un contrôleur de vol basé sur ArduPilot, consultez le guide Contrôle de l'appareil photo dans les missions automatiques d'ArduPilot pour plus de détails.
-
Déclenchement de l'obturateur de l'appareil photo à intervalles réguliers. Consultez le guide Configuration de l'obturateur de l'appareil photo d'ArduPilot pour en savoir plus.
-
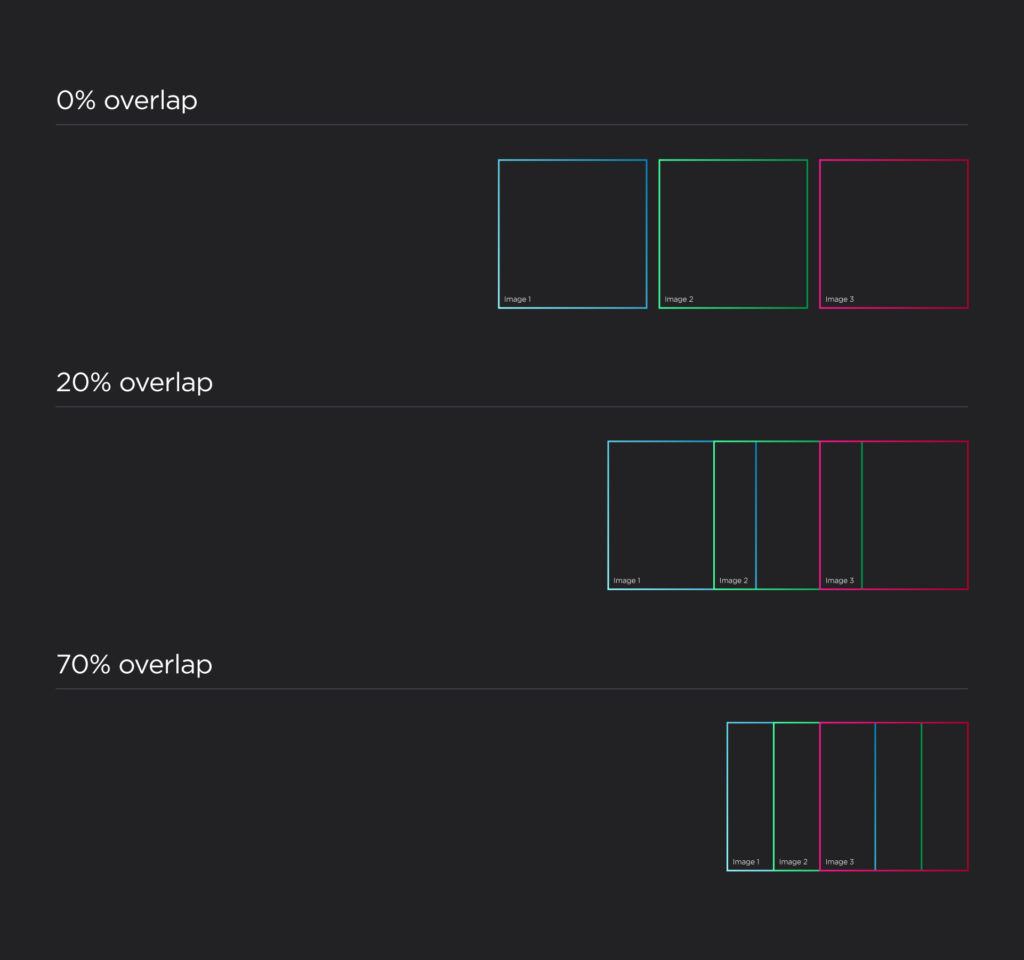
La majorité des logiciels de station de contrôle au sol permet et même nécessite une préparation du plan de mission avant le vol. Vous devez configurer votre appareil photo et votre pilote automatique de manière à obtenir des images avec des chevauchements. Cela est nécessaire car des points communs dans les images adjacentes sont requis pour créer une mosaïque orthogonale. Nous recommandons que le chevauchement frontal soit d'au moins 60 % et le chevauchement latéral d'environ 30 %.
Emplacement de l'antenne
L'antenne GNSS doit être placée sur un plan de sol. Le plan de sol de l'antenne doit être conducteur et d'au moins 70 x 70 mm. Une plaque métallique habituelle devrait être bonne pour cet usage.
Les antennes hélicoïdales ne nécessitent pas de plan de sol. Cependant, un plan de sol peut améliorer considérablement la qualité de l'observation.
Consultez le guide Placement de l'antenne pour en savoir plus.
Isoler Reach M2/M+ des interférences potentielles
Dans certains cas, vous devrez peut-être isoler votre Reach pour garantir une meilleure qualité d'enregistrement. La raison en est que la puissance transmise des signaux GNSS est relativement faible par rapport au bruit possible provenant d'autres composants matériels installés sur votre drone. Cela signifie que la force du signal de l'antenne peut être instable et même parfois interrompue. L'interruption et la perte temporaire de signal sur le récepteur RTK sont appelées glissement de cycle.
Pour éviter les glissements de cycle, nous recommandons d'isoler l'unité Reach M2/M+ et de la connecter à la terre pour éliminer les interférences. De plus, les composants RC, tels que les émetteurs radio, peuvent également affecter le signal. Reach doit être placé aussi loin que possible de ceux-ci.
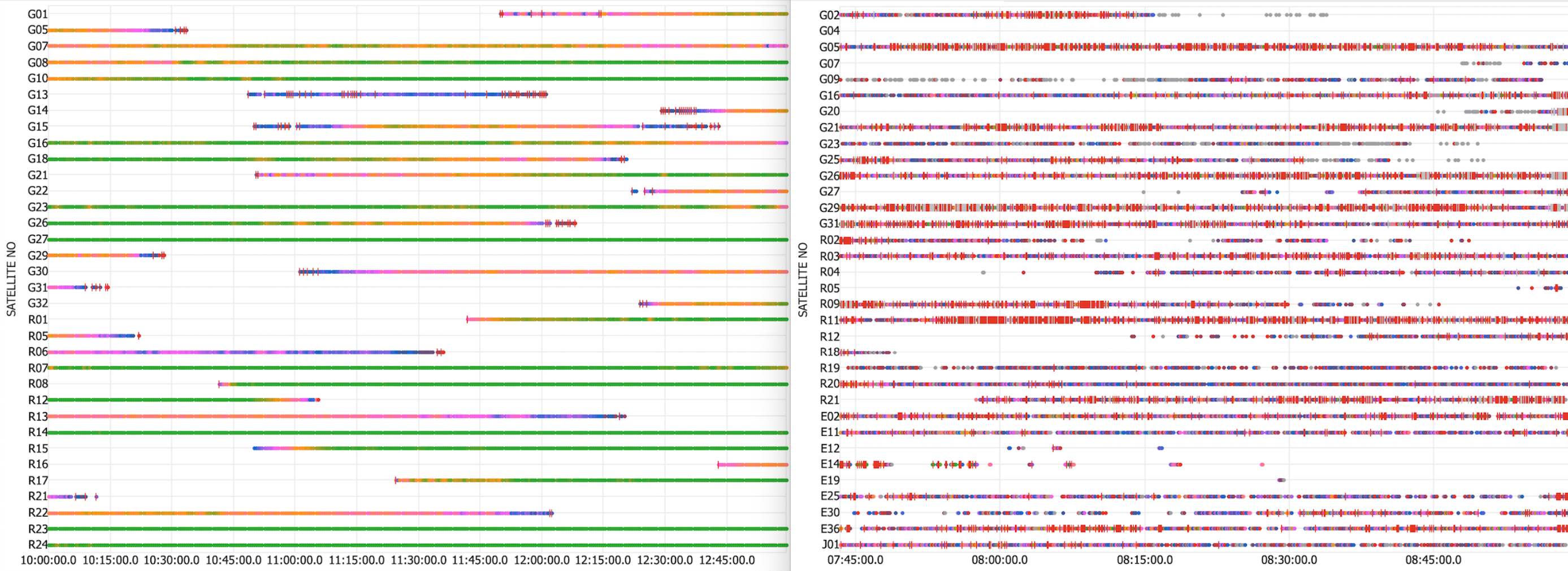
Les effets d'une mauvaise configuration matérielle sont substantiels. Une mauvaise qualité du signal avec des valeurs SNR faibles, beaucoup de glissements de cycle posent des problèmes pour obtenir des solutions fixes et des marques de temps manquantes. Jetez un œil aux figures ci-dessous qui montrent des exemples de bonne (l'image de gauche) et de mauvaise (celle de droite) réception satellite.
Créez un sujet sur le forum de la communauté Emlid si vous rencontrez des difficultés à cette étape.
Configuration de la base Reach RS3/RS2/RS2+/RS+
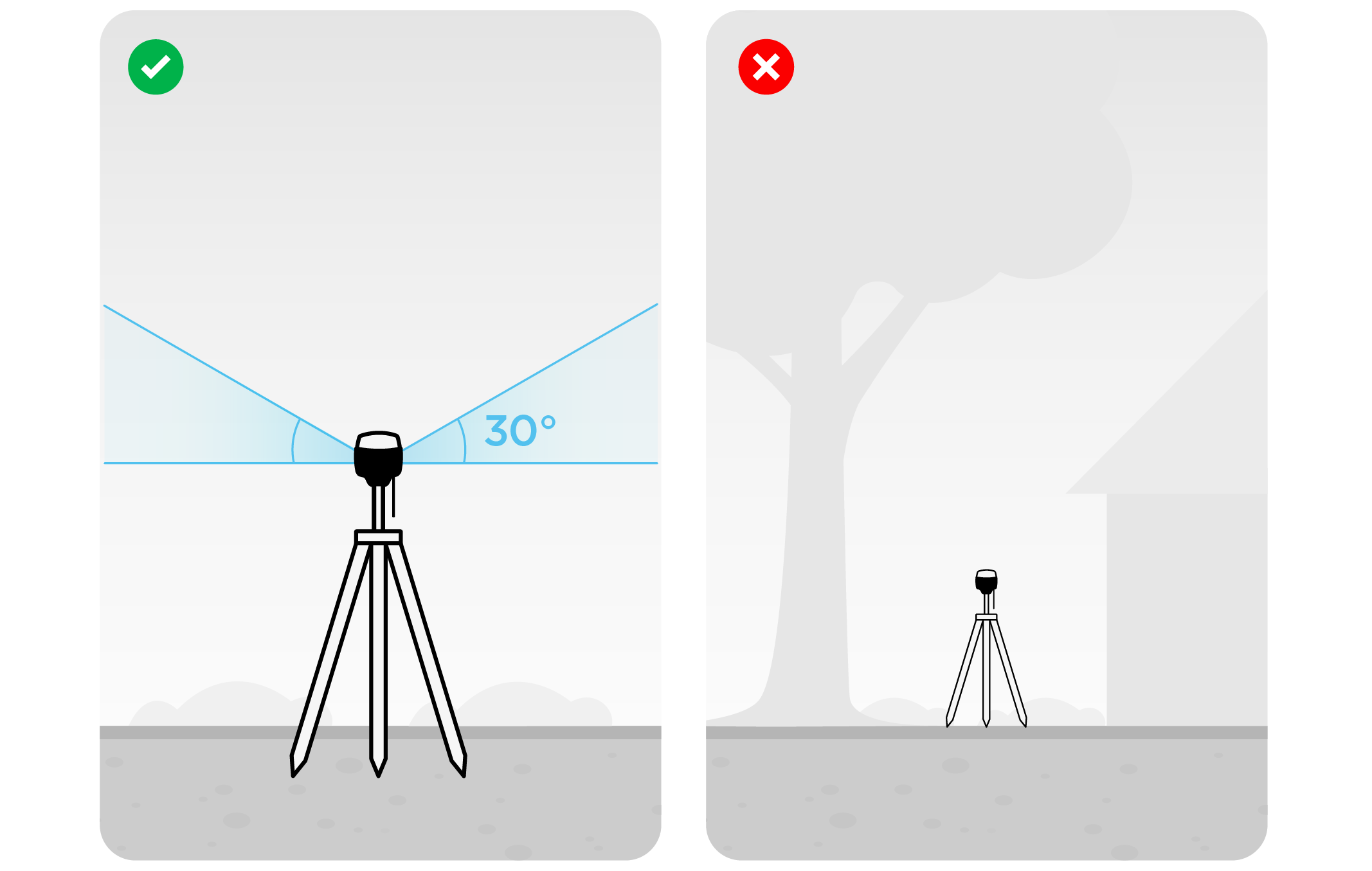
Consultez la figure ci-dessous et choisissez un emplacement approprié pour placer la station de base Reach RS3/RS2/RS2+ ou Reach RS+. Les règles de base sont :
- Bon angle de ciel au-dessus de 30 degrés
- Loin des arbres et des bâtiments
- Pas d'électricité à proximité
Consultez le guide Placer la base pour en savoir plus.
Configuration de la base et du rover avant le vol
Paramètres du rover Reach M2/M+
-
Alimentez votre Reach M2/M+ à partir d'une source d'alimentation externe ou d'une batterie de drone.
astuceConsultez le guide Alimentation pour en savoir plus.
-
Accédez à Reach M2/M+ dans Emlid Flow.
astuceConsultez les guides Connexion à Reach et Connexion de Reach à Internet pour en savoir plus.
-
Allez dans les paramètres RTK et configurez l'une des sélections GNSS et taux de mise à jour recommandés pour l'enregistrement de la marque de temps :
remarque- Reach M2
- Reach M+
Reach M2 suit les systèmes satellites GPS, GLONASS, GALILEO, QZSS et BeiDou. Les données peuvent être enregistrées avec un taux de mise à jour de 1 Hz, 5 Hz ou 10 Hz.
Pour un vol de drone, il est préférable de régler le taux de mise à jour à 10 Hz.
Sélection GNSS Taux de mise à jour autorisés par Reach M+ GPS + GLONASS + GALILEO + SBAS + QZSS 1 Hz GPS + GLONASS + QZSS 5 Hz GPS + GALILEO 5 Hz GPS 10 Hz -
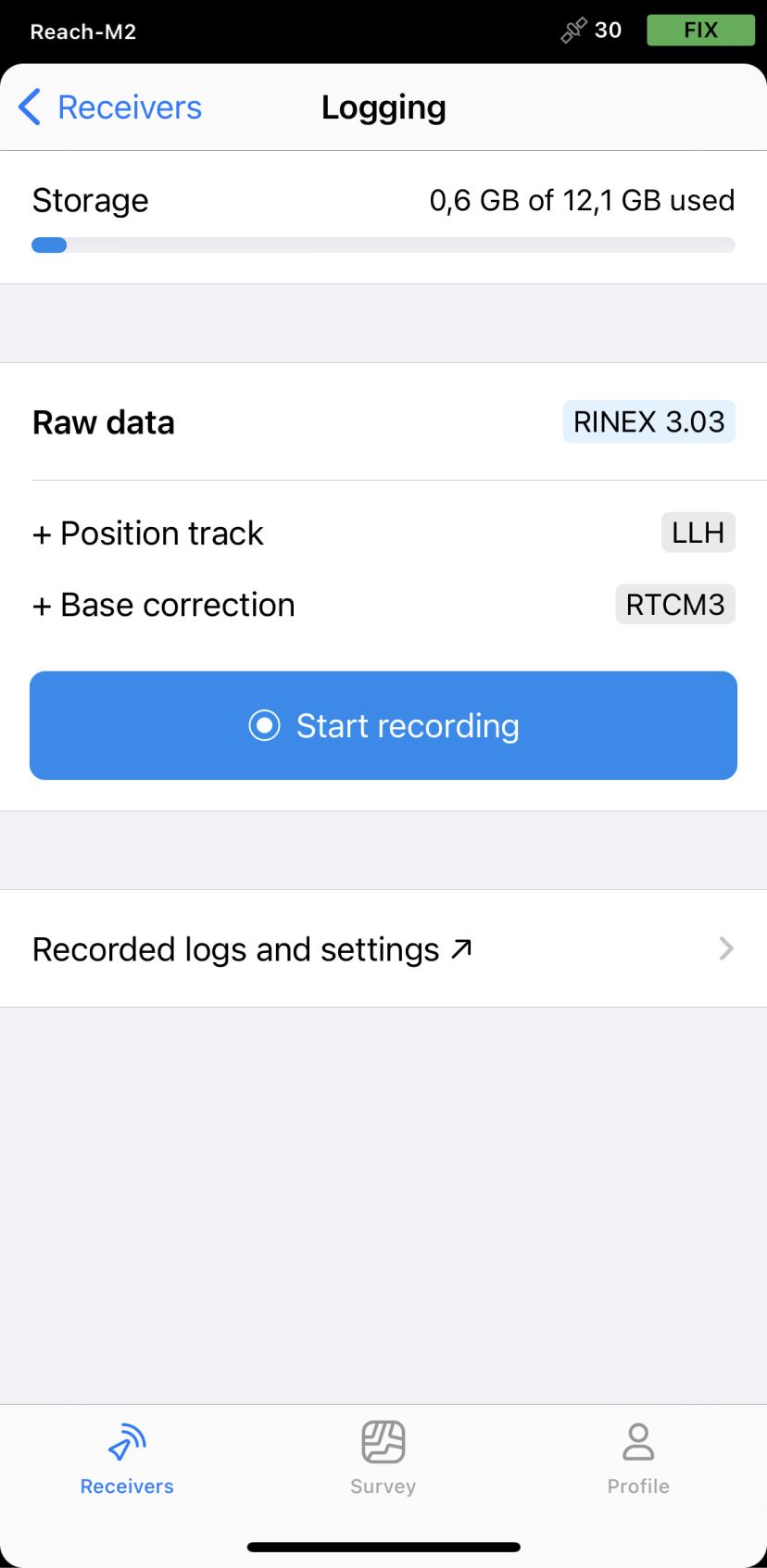
Activer l'enregistrement des données brutes sur l'écran Logging (Journalisation) :
Paramètres de la base Reach RS3/RS2/RS2+/RS+
-
Allumez l'unité Reach RS3/RS2/RS2+ ou Reach RS+.
-
Accédez au récepteur dans Emlid Flow.
-
Allez à l'écran GNSS settings (Paramètres GNSS).
-
Choisissez le même GNSS que pour Reach M2/M+ avec un taux de mise à jour GNSS de 1 Hz.
-
Activez l'enregistrement des données brutes sur l'écran Logging (Journalisation).
Placer des Points de contrôle au sol
Les Points de contrôle au sol (GCP) sont des points avec des coordonnées connues sur le sol dans la zone de vos intérêts. Les GCP aident généralement à améliorer et vérifier l'exactitude, obtenir la bonne échelle et l'orientation de la carte. Ils sont également nécessaires pour le positionnement absolu de votre carte par rapport au monde réel qui l'entoure.
Consultez le guide Placer la base pour en savoir plus sur l'exactitude absolue et relative.
Reach fournit des coordonnées avec une précision centimétrique en PPK. De plus, si vous placez la base sur un point avec des coordonnées connues, vous obtiendrez les coordonnées avec une précision absolue. Dans ce cas, les GCP peuvent vous aider à vérifier l'exactitude.
Les GCP doivent être clairement visibles sur les images du drone. Assurez-vous que la marque contraste avec ses environs et qu'elle soit suffisamment grande. Placez une mire avec un récepteur exactement au centre de la marque pour prendre ses coordonnées.
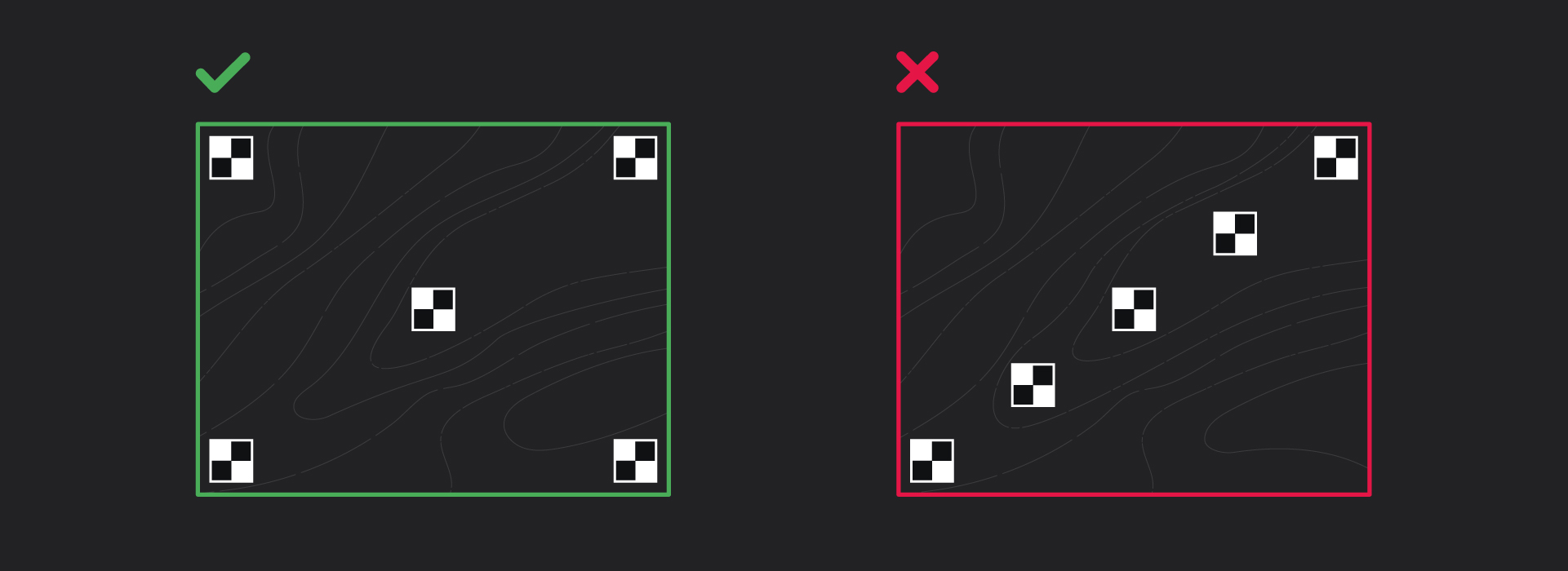
La quantité suffisante de GCP dépend de la superficie du site. Généralement, il s'agit de 5 à 10 points. Il existe quelques règles de base pour le placement des points de contrôle :
- Ils doivent être répartis uniformément dans la zone où vous effectuez le levé. Par exemple, si vous utilisez 5 points, placez-en un à chaque coin et le dernier au centre de la zone
- Ils ne doivent pas être sur la même ligne
Il est également idéal si vous avez la possibilité de placer des GCP aux points les plus hauts et les plus bas du site. Cela aide à réaliser la projection plane correcte.
Il est important de répondre à ces exigences si vous souhaitez obtenir la même précision sur l'ensemble de la parcelle.
Consultez le guide Placer des GCP pour en savoir plus.
Vol de levé
Nous n'accordons pas beaucoup d'attention à cette étape en raison des différences dans les paramètres de vol des drones d'un modèle à l'autre. Veuillez vérifier le manuel du fabricant de votre drone avant le vol.
Une fois toutes les configurations effectuées, vous pouvez procéder au vol avec votre drone.
Assurez-vous :
- L'enregistrement des données brutes sur les unités Reach M2/M+ et Reach RS3/RS2/RS2+ ou Reach RS+ est activé avant le vol.
- Le déclenchement de l'appareil photo est activé. Déclenchez l'appareil photo et vérifiez la dernière marque de temps sur l'écran Camera control screen (Contrôle de la caméra) dans Settings (Paramètres) dans Emlid Flow.
Lorsque le vol est terminé, vous pouvez désactiver l'enregistrement des journaux. Avant d'éteindre les appareils, veuillez attendre que le traitement des journaux soit terminé.
Vous pouvez télécharger les journaux de données brutes de la base et du rover ultérieurement.
À la suite de la mission de cartographie avec Reach, vous disposerez du jeu de données suivant :
- Journal brut d'une base
- Journal brut d'un rover
- Ensemble d'images d'un drone
- Liste des GCP
Vous pouvez maintenant préparer le jeu de données pour un traitement ultérieur.