Reach UAV-Kit für PPK-Kartierung konfigurieren
In dieser Anleitung wird erklärt, wie Sie Ihre Reach-Empfänger für die PPK-Kartierung mit UAV einrichten.
Wir empfehlen, den Artikel So funktioniert PKK zu lesen, bevor Sie beginnen.
Übersicht
Zur Konfiguration des Reach UAV-Kits für die PPK-Kartierung benötigen Sie Folgendes:
- Reach RS2/RS2+ oder Reach RS+ Basis
- Reach M2/M+ Rover mit GNSS-Antenne
- Blitzschuhadapter (HSA) für eine Kamera
- Eine Kamera mit Blitzschuh (z. B. Sony, Canon, Nikon)
Der Reach RS+ kann nicht als Basis für einen Reach M2 Rover dienen, da Reach M2 Mehrfrequenzkorrekturen benötigt. Dennoch können Sie den Reach RS2/RS2+ als Basis für Reach M+ verwenden. Beachten Sie, dass Sie in diesem Fall nicht alle Vorteile des Multiband-Empfängers nutzen können. Weitere Informationen zu den Unterschieden zwischen Einzelband- und Multiband-Empfängern finden Sie im Artikel Einzelband vs. Multiband.
Außerdem benötigen Sie einige Bodenkontrollpunkte (GCPs). Für die Platzierung von GCPs sind eine Basis und ein Rover erforderlich, oder Sie können einen Empfänger verwenden, der an einen Ntrip angeschlossen ist.
In dieser Anleitung konzentrieren wir uns hauptsächlich auf den Teil der Integration, der die GNSS-Ausrüstung betrifft. Sie benötigen jedoch auch ein UAV und einen PC mit einer Bodenkontrollstation und photogrammetrischer Software. Für UAVs gibt es 2 Hauptanforderungen:
- Das Vorhandensein oder die Möglichkeit, eine Kamera mit Blitzschuhanschluss zu installieren
- Funktionalität zur Auslösung der Kamera: durch die Kamera selbst oder durch den Autopiloten
Reach M2/M+ Hardware-Einrichtung
Den Reach M2/M+ mit einer Kamera über HSA verbinden
Mit HSA kann der Reach M2/M+ in jedem Moment, in dem die Kamera ein Foto aufnimmt, eine genaue Zeitmarke aufzeichnen.
Die Kamera muss über einen Blitzschuh verfügen, um mit dem Reach M2/M+ integriert werden zu können. Wenn Sie DJI Mavic oder Phantom verwenden, die keinen Zugriff auf den Blitzschuh bieten, können Sie immer noch mit GCPs arbeiten (#placing-ground-control-points).
Zum Anschluss des Reach an eine Kamera mit Blitzschuhadapter verwenden Sie das 5-polige JST-GH-Kabel, das im Lieferumfang des Reach M2/M+ enthalten ist. Stecken Sie den Blitzschuhstecker in einen Kamerablitzschuh und den JST-GH-Stecker in den С1-Port des Reach M2/M+.


Auslösung der Kamera
Je nach Anwendung gibt es verschiedene Möglichkeiten, eine Kamera auszulösen.
-
Auslösung über die Kamera. Einige Kameras bieten eine Zeitrafferfunktion, mit der in regelmäßigen Abständen ein Foto aufgenommen werden kann. Wenn Ihre Kamera diese Option unterstützt, empfehlen wir, sie zu verwenden, da dies die einfachste und unkomplizierteste Methode ist.
tipJede Kamera verwendet unterschiedliche Ports für die Auslösung. Es könnte sich um einen USB- oder HDMI-Port handeln. Lesen Sie im Kamerahandbuch nach, wie Sie Ihre Kamera auslösen.
-
Auslösung über Autopilot. Es gibt mehrere Möglichkeiten, die Kamera über Autopiloten auszulösen:
-
Auslösen des Kameraverschlusses an Wegpunkten. Der Autopilot kann den Auslöser jedes Mal betätigen, wenn die Drohne einen Wegpunkt erreicht. Wenn Sie eine auf ArduPilot basierende Flugsteuerung verwenden, finden Sie weitere Informationen in der Anleitung Kamerasteuerung in Auto-Missionen von ArduPilot.
-
Auslösen des Kameraverschlusses in regelmäßigen Abständen. Lesen Sie die Kameraverschluss konfigurieren Anleitung von ArduPilot, um mehr zu erfahren.
-
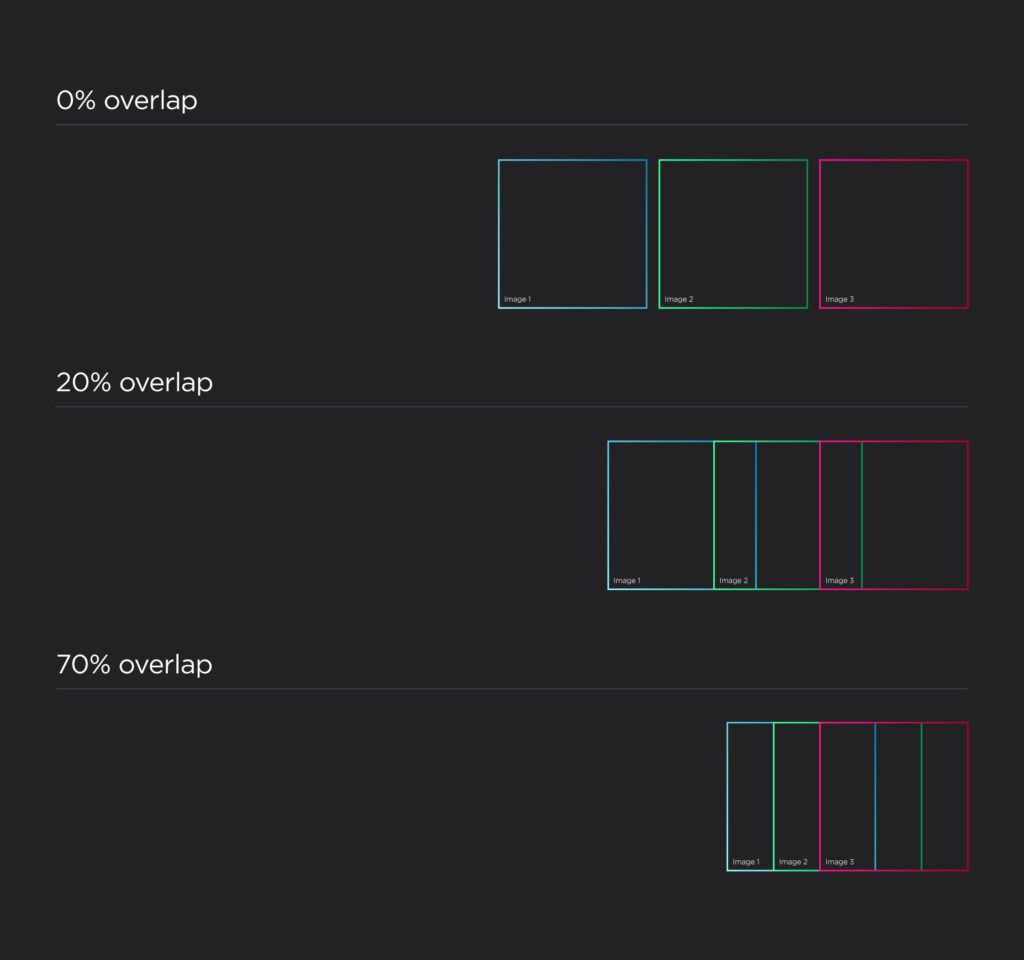
Die meisten Softwareprogramme für Bodenkontrollstationen ermöglichen oder erfordern sogar die Erstellung eines Missionsplans vor dem Flug. Sie müssen Ihre Kamera und den Autopiloten so konfigurieren, dass sie Bilder mit Überlappungen erhalten. Dies ist notwendig, weil gemeinsame Punkte in benachbarten Bildern erforderlich sind, um ein orthogonales Mosaik zu erstellen. Wir empfehlen, dass die vordere Überlappung mindestens etwa 60 % und die seitliche Überlappung etwa 30 % beträgt.
Antenne platzieren
Die GNSS-Antenne sollte auf einer Massefläche platziert werden. Die Massefläche der Antenne sollte leitfähig und mindestens 70x70 mm groß sein. Eine gewöhnliche Metallplatte sollte für diesen Zweck gut geeignet sein.
Wendelantennen benötigen keine Massefläche. Dennoch kann eine Massefläche die Beobachtungsqualität erheblich verbessern.
Weitere Informationen finden Sie in der Anleitung Antenne platzieren.
Reach M2/M+ vor potenziellen Störungen isolieren
In manchen Fällen müssen Sie Ihren Reach isolieren, um die beste Protokollierungsqualität zu gewährleisten. Der Grund dafür ist, dass die Sendeleistung von GNSS-Signalen im Vergleich zum möglichen Rauschen anderer Hardware-Komponenten, die in Ihrem UAV installiert sind, eher gering ist. Das bedeutet, dass die Stärke des Antennensignals unbeständig sein kann und manchmal sogar unterbrochen wird. Unterbrechung und vorübergehender Signalverlust am RTK-Empfänger werden als Cycle-Slip bezeichnet.
Um Cycle-Slips zu vermeiden, empfehlen wir, die Reach M2/M+ Einheit zu isolieren und zu erden,, um Störungen zu vermeiden. Auch RC-Komponenten, wie z. B. Funksender, können das Signal beeinträchtigen. Der Reach sollte so weit wie möglich von ihnen entfernt sein.
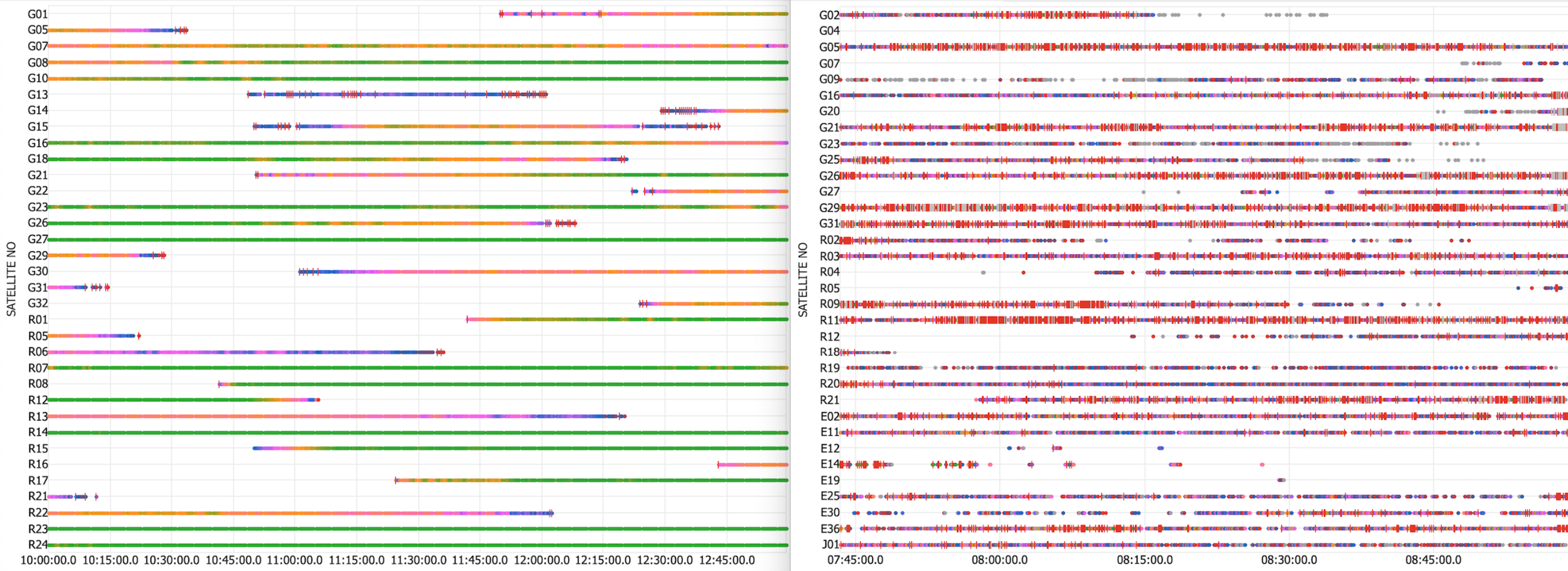
Die Auswirkungen einer schlechten Hardware-Einstellung sind erheblich. Schlechte Signalqualität mit niedrigen SNR-Werten, viele Cycle-Slips führen zu Problemen bei der Ermittlung von Fixed-Lösungen (Zentimetergenauigkeit) und fehlenden Zeitmarken. Die folgenden Abbildungen zeigen Beispiele für guten (linkes Bild) und schlechten (rechtes Bild) Satellitenempfang.
Erstellen Sie ein Thema im Emlid-Community-Forum, falls Sie in dieser Phase auf Schwierigkeiten stoßen.
Reach RS2/RS2+/RS+ Basiseinrichtung
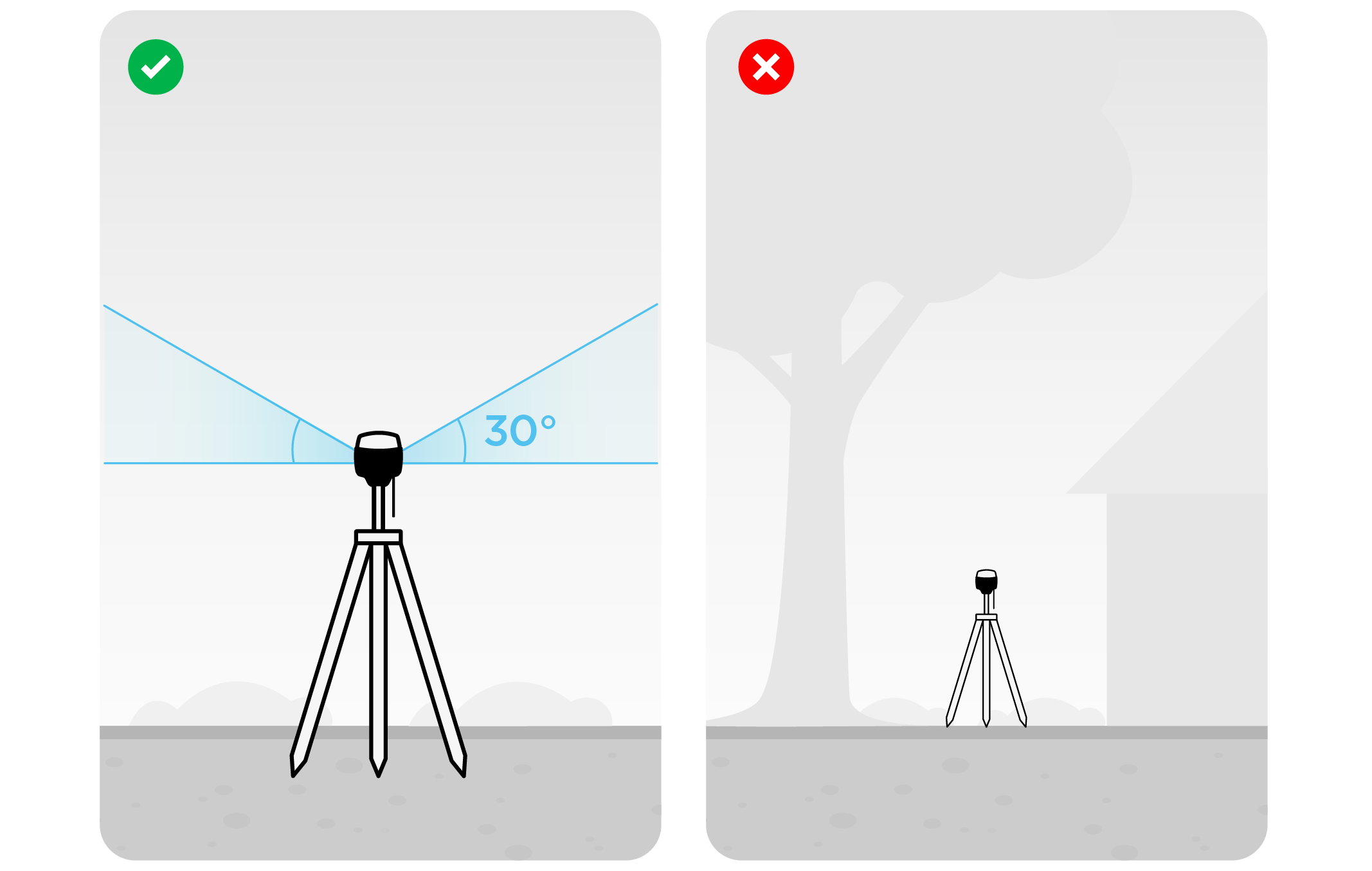
Sehen Sie sich die Abbildung unten an und wählen Sie einen geeigneten Standort für die Reach RS2/RS2+ oder Reach RS+ Basisstation. Die Grundregeln lauten:
- Guter Elevationswinkel über 30 Grad
- Abseits von Bäumen und Gebäuden
- Keine Elektrizität in der Nähe
In der Anleitung Basis platzieren finden Sie weitere Informationen.
Basis und Rover vor dem Flug konfigurieren
Reach M2/M+ Rover-Einstellungen
-
Versorgen Sie Ihren Reach M2/M+ über eine externe Stromquelle oder eine Drohnenbatterie.
tipLesen Sie die Anleitung Stromversorgung, um mehr zu erfahren.
-
Greifen Sie in Emlid Flow auf den Reach M2/M+ zu.
tipIn den Anleitungen Verbindung mit Reach und Reach mit dem Internet verbinden finden Sie weitere Informationen.
-
Gehen Sie zu den RTK-Einstellungen und konfigurieren Sie eine der empfohlenen GNSS-Auswahlen und Aktualisierungsraten für die Zeitmarkenprotokollierung:
note- Reach M2
- Reach M+
Der Reach M2 verfolgt die Satellitensysteme GPS, GLONASS, GALILEO, QZSS und BeiDou. Die Daten können mit einer Aktualisierungsrate von 1 Hz, 5 Hz oder 10 Hz aufgezeichnet werden.
Für einen Drohnenflug ist es besser, die Aktualisierungsrate auf 10 Hz einzustellen.
GNSS-Auswahl Erreichen der für M+ zulässigen Aktualisierungsraten GPS + GLONASS + GALILEO + SBAS + QZSS 1 Hz GPS + GLONASS + QZSS 5 Hz GPS + GALILEO 5 Hz LLH 10 Hz -
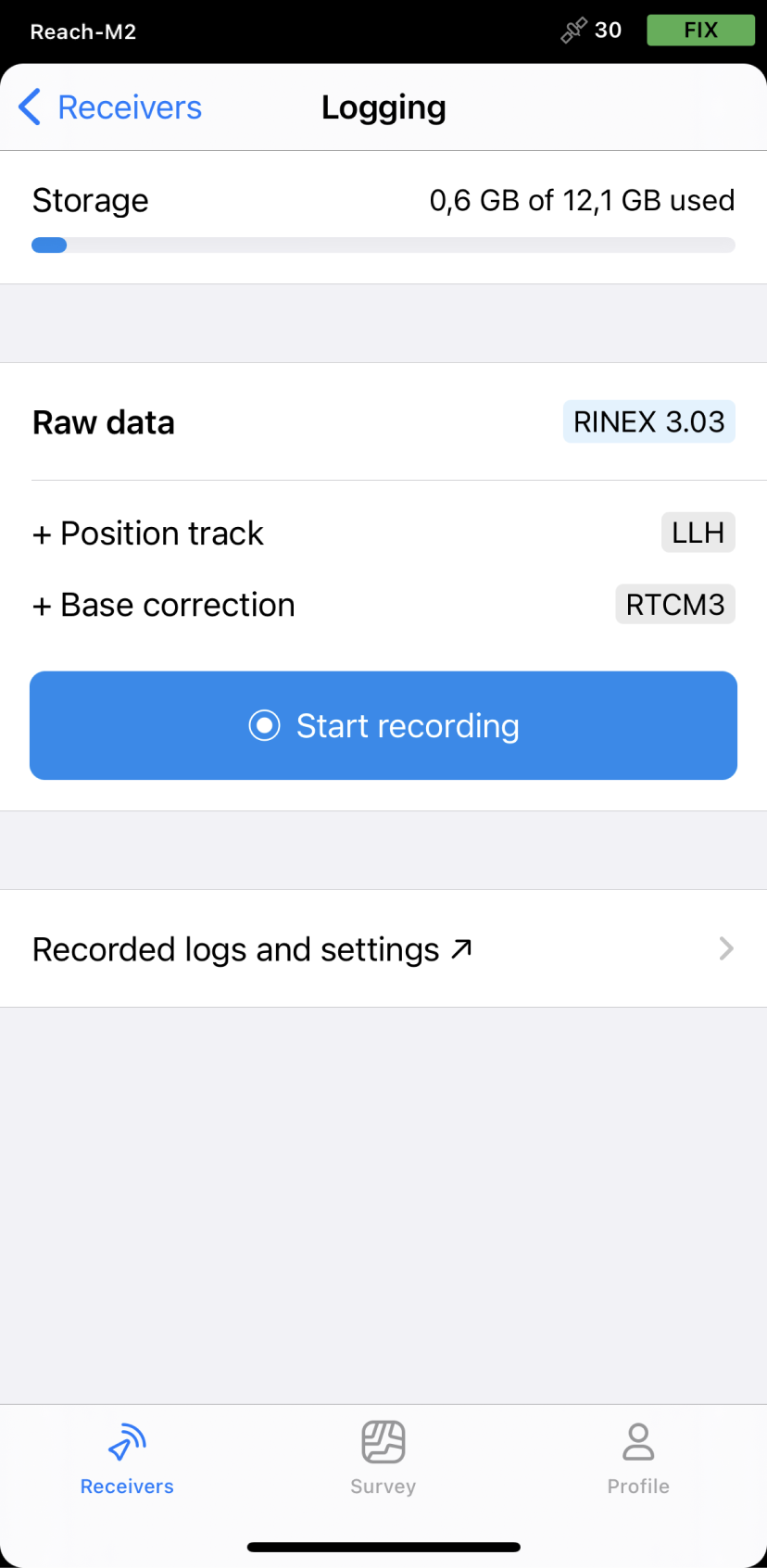
Aktivieren Sie die Rohdatenaufzeichnung auf dem Bildschirm Protokollierung:
Reach RS2/RS2+/RS+-Basiseinstellungen
-
Schalten Sie den Reach RS2/RS2+ oder den Reach RS+ ein.
-
Greifen Sie auf den Empfänger in Emlid Flow zu.
-
Rufen Sie den Bildschirm GNSS-Einstellungen auf.
-
Wählen Sie das gleiche GNSS wie für den Reach M2/M+ mit 1 Hz GNSS-Aktualisierungsrate.
-
Aktivieren Sie die Rohdatenaufzeichnung auf dem Bildschirm Protokollierung.
Bodenkontrollpunkte platzieren
Bodenkontrollpunkte (GCPs) sind Punkte mit bekannten Koordinaten auf dem Boden in dem Gebiet, in dem Sie arbeiten. GCPs helfen in der Regel dabei, die Genauigkeit zu verbessern und zu überprüfen sowie den richtigen Maßstab und die richtige Ausrichtung der Karte zu erhalten. Außerdem werden sie für die absolute Positionierung Ihrer Karte in Bezug auf die reale Welt um sie herum benötigt.
In der Anleitung Basis platzieren erfahren Sie mehr über absolute und relative Genauigkeit.
Der Reach liefert zentimetergenaue Koordinaten in PPK. Auch wenn Sie die Basis auf einen Punkt mit bekannten Koordinaten legen, erhalten Sie die Koordinaten mit absoluter Genauigkeit. In einem solchen Fall können GCPs Ihnen helfen, die Genauigkeit zu überprüfen.
Die GCPs sollten auf den Bildern der Drohne deutlich sichtbar sein. Achten Sie darauf, dass die Markierung einen Kontrast zu ihrer Umgebung bildet und groß genug ist. Stellen Sie einen Vermessungsstab mit einem Empfänger genau in die Mitte der Markierung, um deren Koordinaten zu ermitteln.
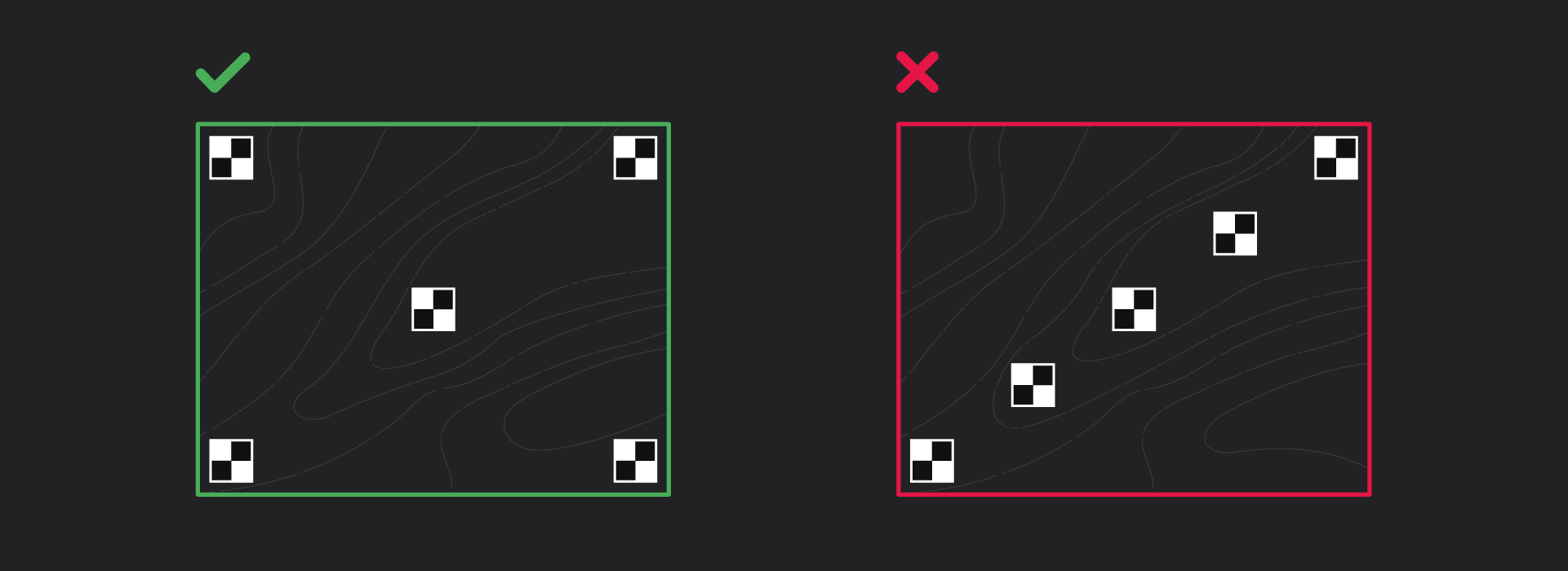
Die ausreichende Anzahl von GCPs hängt von der Fläche des Standorts ab. In der Regel sind es 5-10 Punkte. Es gibt einige Grundregeln für die Platzierung von Kontrollpunkten:
- Sie sollten in dem Gebiet, in dem Sie die Vermessung durchführen, gleichmäßig verteilt werden. Wenn Sie z. B. 5 Punkte verwenden, setzen Sie je einen für jede Ecke und den letzten in der Mitte des Bereichs
- Sie dürfen sich nicht in der gleichen Linie befinden
Außerdem ist es von Vorteil, wenn Sie die Möglichkeit haben, GCPs an den höchsten und niedrigsten Punkten des Geländes zu platzieren. Das hilft, die korrekte Flachprojektion durchzuführen.
Es ist wichtig, diese Anforderungen zu erfüllen, wenn Sie auf der gesamten Fläche die gleiche Genauigkeit erreichen wollen.
Weitere Informationen finden Sie in der Anleitung Platzierung von GCPs.
Vermessungsflug
Wir schenken diesem Schritt keine große Aufmerksamkeit, da die Flugeinstellungen der Drohnen von Modell zu Modell unterschiedlich sind. Bitte lesen Sie vor dem Flug das Handbuch Ihres Drohnenherstellers.
Nachdem Sie alle Konfigurationen vorgenommen haben, können Sie mit Ihrer Drohne in den Flug gehen.
Vergewissern Sie sich vor dem Flug, dass die Rohdatenaufzeichnung sowohl auf dem Reach M2/M+ als auch auf dem Reach RS2/RS2+ oder Reach RS+ aktiviert ist.
- Die Rohdatenaufzeichnung auf den Geräten Reach M2/M+ und Reach RS2/RS2+ oder Reach RS+ wird vor dem Flug aktiviert.
- Die Kameraauslösung ist eingeschaltet. Lösen Sie die Kamera aus und überprüfen Sie die letzte Zeitmarkierung auf dem Bildschirm Kamerasteuerung in Einstellungen in Emlid Flow.
Wenn der Flug beendet ist, können Sie die Aufzeichnung von Protokollen deaktivieren. Bevor Sie die Geräte ausschalten, warten Sie bitte, bis die Verarbeitung der Protokolle abgeschlossen ist.
Sie können später Rohdatenprotokolle sowohl von der Basis als auch vom Rover herunterladen.
Als Ergebnis der Kartierungsmission mit dem Reach erhalten Sie den folgenden Datensatz:
- Raw-Protokoll von einer Basis
- Raw-Protokoll von einem Rover
- Bilderserie von einer Drohne
- Liste der GCPs
Nun können Sie den Datensatz für die weitere Bearbeitung vorbereiten.