Basis und Rover einrichten
Einführung
Dieses Tutorial zeigt, wie man zwei Reach M2 oder Reach M+ Geräte als Basis und Rover mit der Korrekturverbindung über WLAN einrichtet.
Für die Einstellung der Ntrip-Basiskorrekturen befolgen Sie die Schritte in der Anleitung Mit dem Ntrip-Dienst arbeiten.
Reach-Geräte umbenennen
Standardmäßig hat jeder Reach den gleichen Namen. Um zwischen der Basis und dem Rover vor Ort zu unterscheiden, müssen Sie sie umbenennen. Folgen Sie den nachstehenden Schritten:
- Stellen Sie eine Verbindung zum Reach her, den Sie als Basis verwenden möchten.
Wenn Sie eine Verbindung zu Ihrem Reach herstellen, blinken alle LEDs gleichzeitig. Wenn Sie während einer Vermessung blinkende LEDs benötigen, tippen Sie auf dem Bildschirm Empfänger auf die Zelle mit dem Namen Ihres Empfängers und erhalten Sie Zugriff auf die Schaltfläche Blinkende LEDs.
-
Gehen Sie zu Einstellungen und tippen Sie auf Empfängerinformationen.
-
Ändern Sie unter Empfänger und Hotspot-Name den Namen Ihres Reach zu reach-base.
Der von Ihnen eingegebene Name wird auch als Bezeichnung für das WLAN-Netzwerk verwendet, wenn sich der Reach im Hotspot-Modus befindet.
-
Drücken Sie Speichern.
-
Gehen Sie mit dem zweiten Reach auf diesselbe Weise vor. Verwenden Sie jedoch den Namen reach-rover anstelle von reach-base.
Basisstation einrichten
Nun müssen Sie die RTK-Einstellungen der Basis konfigurieren. Folgen Sie den nachstehenden Schritten:
-
Stellen Sie eine Verbindung zur Basiseinheit her.
-
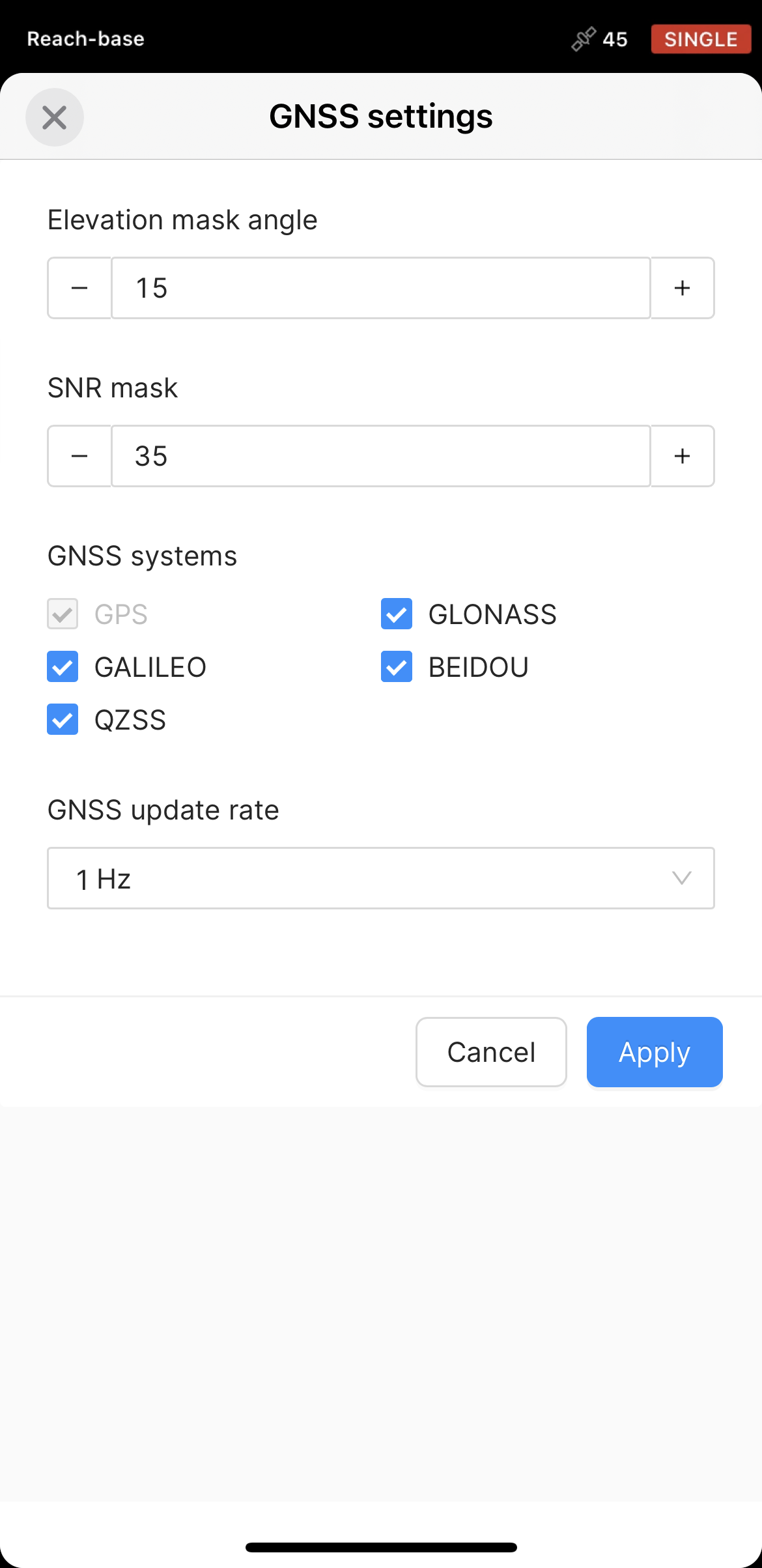
Gehen Sie zu Einstellungen und tippen Sie auf GNSS-Einstellungen. Wählen Sie die Satellitensysteme aus, je nachdem, welches Reach-Gerät verwendet wird:
- Reach M2
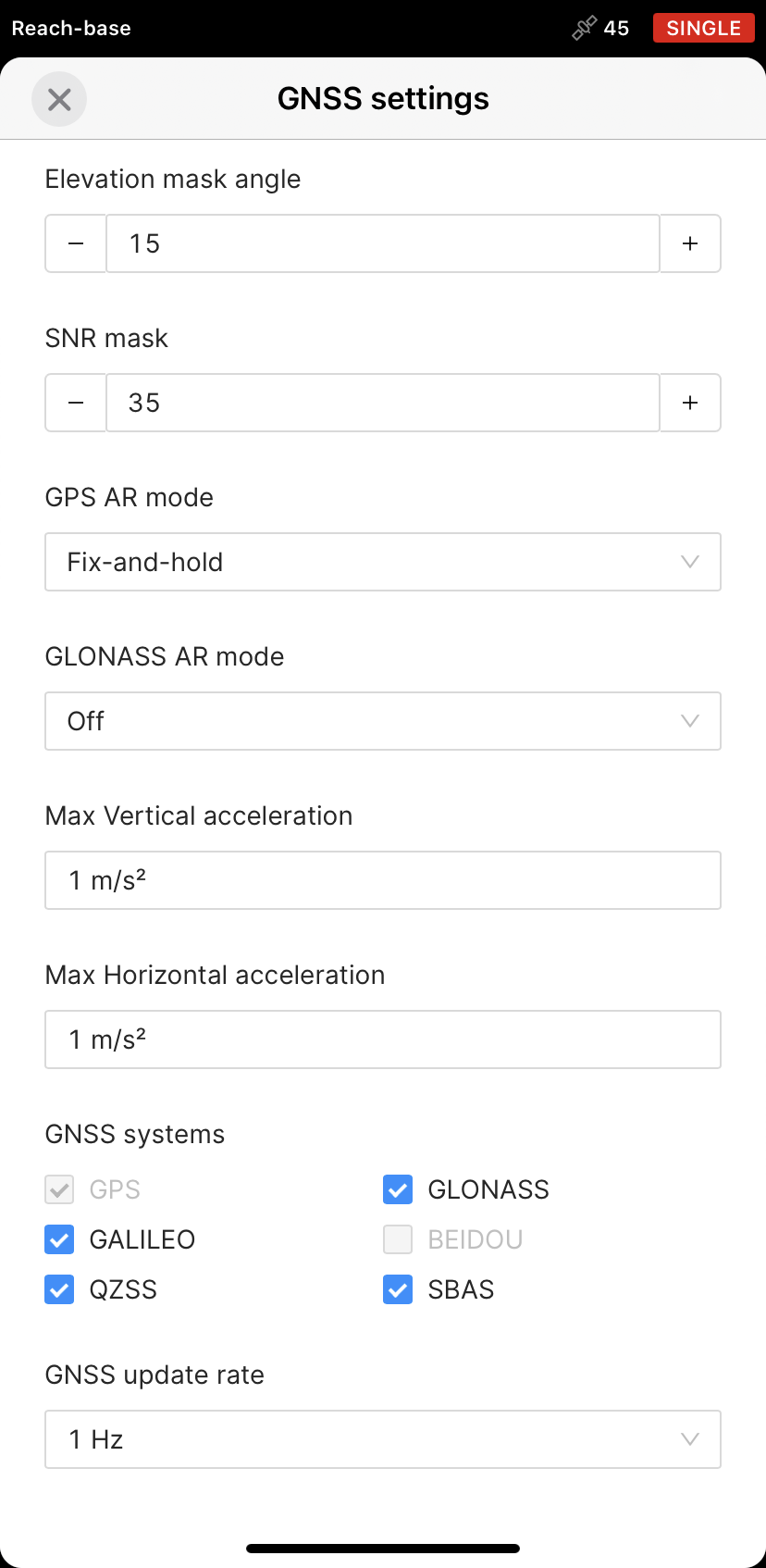
- Reach M+
Wählen Sie die Satellitensysteme aus. Stellen Sie die GNSS-Aktualisierungsrate auf 1 Hz ein.
Wählen Sie je nach Ihrem Standort GLONASS oder BeiDou. Während GLONASS den größten Teil der Welt abdeckt, könnte BeiDou in der asiatisch-pazifischen Region effizienter sein. Wählen Sie den Rest der Satellitensysteme. Stellen Sie die GNSS-Aktualisierungsrate auf 1 Hz ein.
Nachdem Sie die RTK-Einstellungen konfiguriert haben, müssen Sie die Übertragung von RTK-Korrekturen über TCP einrichten. Folgen Sie den nachstehenden Schritten:
-
Kehren Sie zum Bildschirm Empfänger zurück und tippen Sie auf Basisausgabe.
-
Wählen Sie TCP-Server (TCP server).
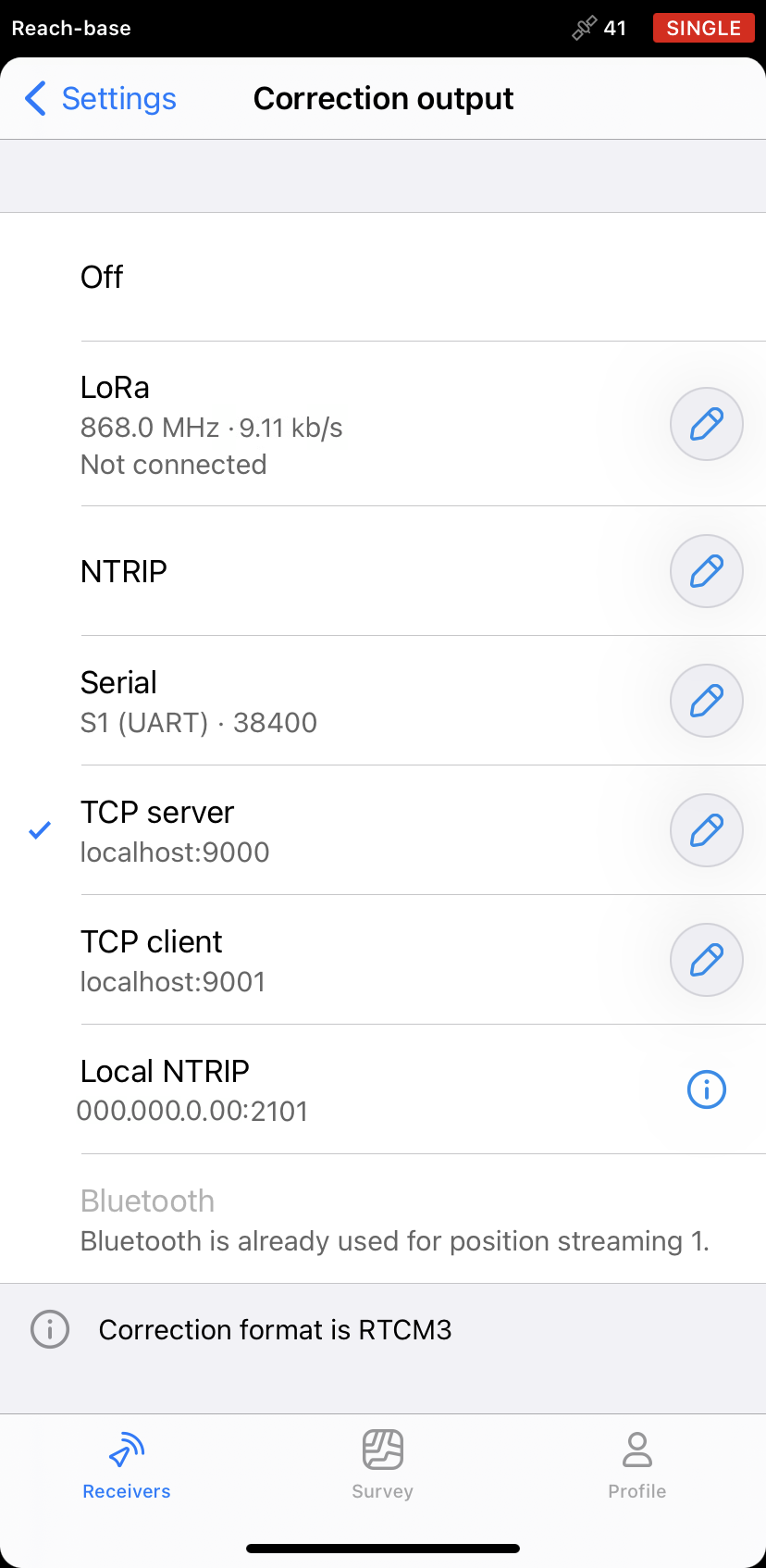
Standardmäßig wird die Basis als localhost auf dem TCP-Anschluss 9000 konfiguriert.
-
Gehen Sie zum Bildschirm Basiseinstellungen auf und warten Sie, bis die Basis ihre Position gemittelt hat.
-
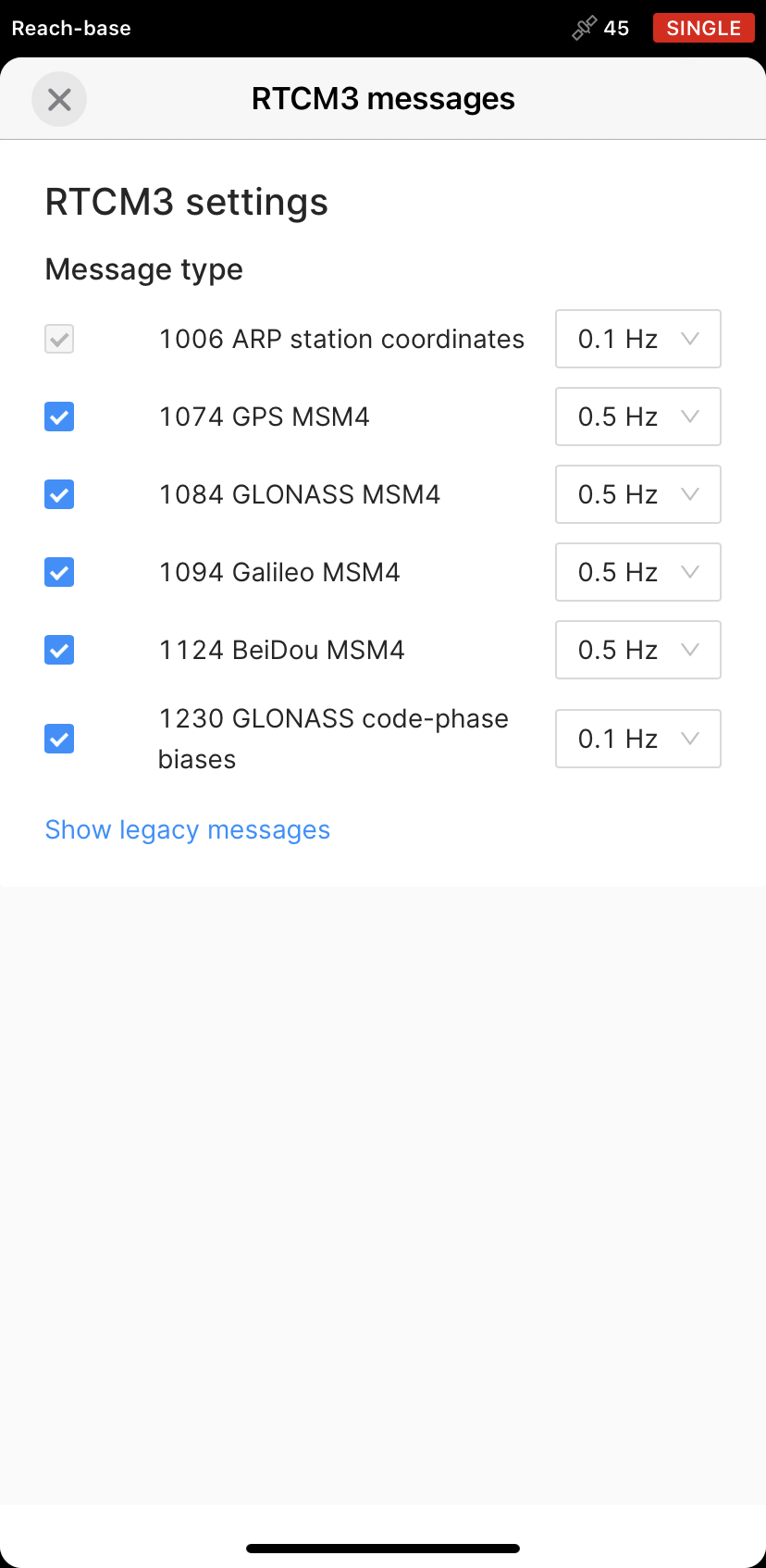
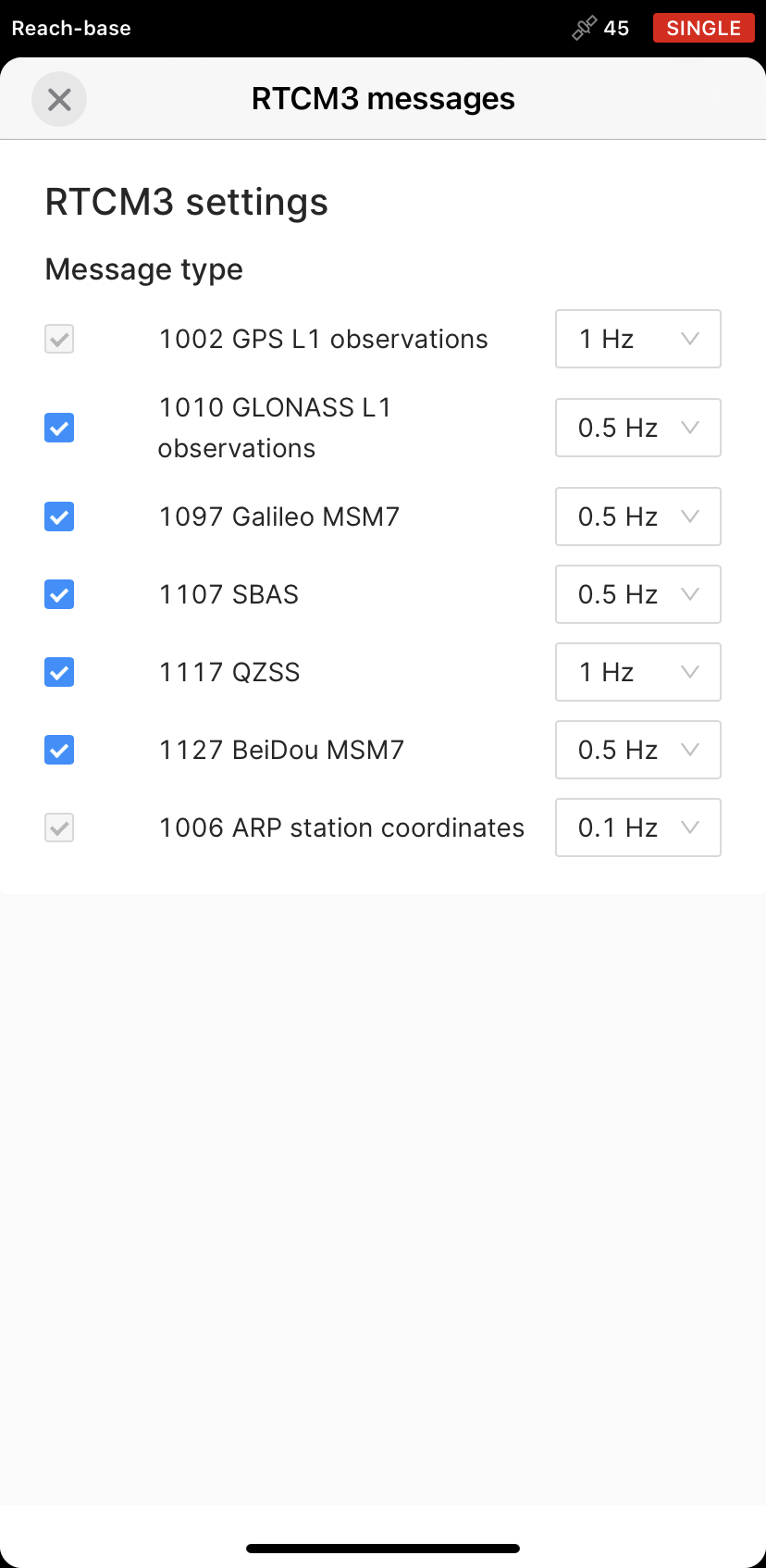
Wählen Sie in der Liste der RTCM3-Nachrichten aus, dass die Meldungen je nach verwendetem Reach-Gerät ausgegeben werden sollen:
- Reach M2
- Reach M+
Wählen Sie die Ausgabe von ARP-Stationskoordinaten mit 0,1 Hz, von MSM4-Nachrichten mit 1 Hz und von GLONASS-Code-Phasenverschiebungen mit 0,1 Hz.
Wählen Sie die Ausgabe von GPS L1-Beobachtungen mit 1 Hz, GLONASS L1-Beobachtungen mit 0,5 Hz, Galileo MSM7 mit 0,5 Hz, SBAS mit 0,5 Hz, QZSS mit 1 Hz, BeiDou mit 0,5 Hz und ARP-Stationskoordinaten mit 0,1 Hz.
Rover einrichten
Wenn Sie mit der Basis fertig sind, müssen Sie die RTK-Einstellungen auf dem Rover konfigurieren. Folgen Sie den nachstehenden Schritten:
-
Stellen Sie eine Verbindung zur Rover-Einheit her.
-
Gehen Sie zu Einstellungen und tippen Sie auf GNSS-Einstellungen.
-
Wählen Sie die gleichen GNSS-Systeme wie für die Basis und stellen Sie eine GNSS-Aktualisierungsrate von 5 Hz ein. Übernehmen Sie die Änderungen.
Wenn Sie mit der Basis fertig sind, müssen Sie die RTK-Einstellungen auf dem Rover konfigurieren. Folgen Sie den nachstehenden Schritten:
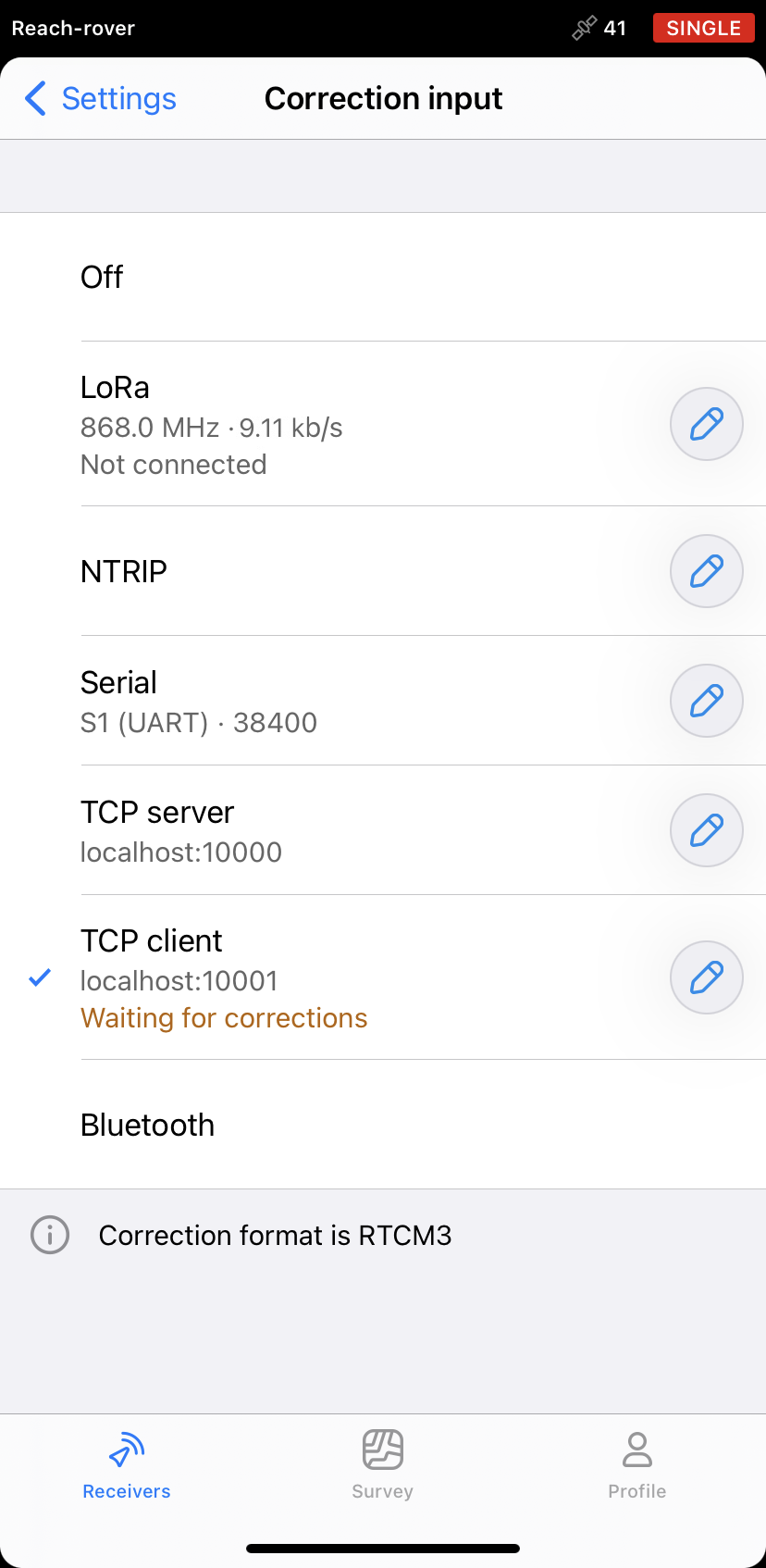
- Kehren Sie zum Bildschirm Empfänger zurück. Gehen Sie zu Korrektureingabe und wählen Sie TCP-Client.
-
Fügen Sie die Basis-IP-Adresse in das Feld Adresse ein.
-
Geben Sie den Basiskorrekturanschluss in das Feld Anschluss ein.
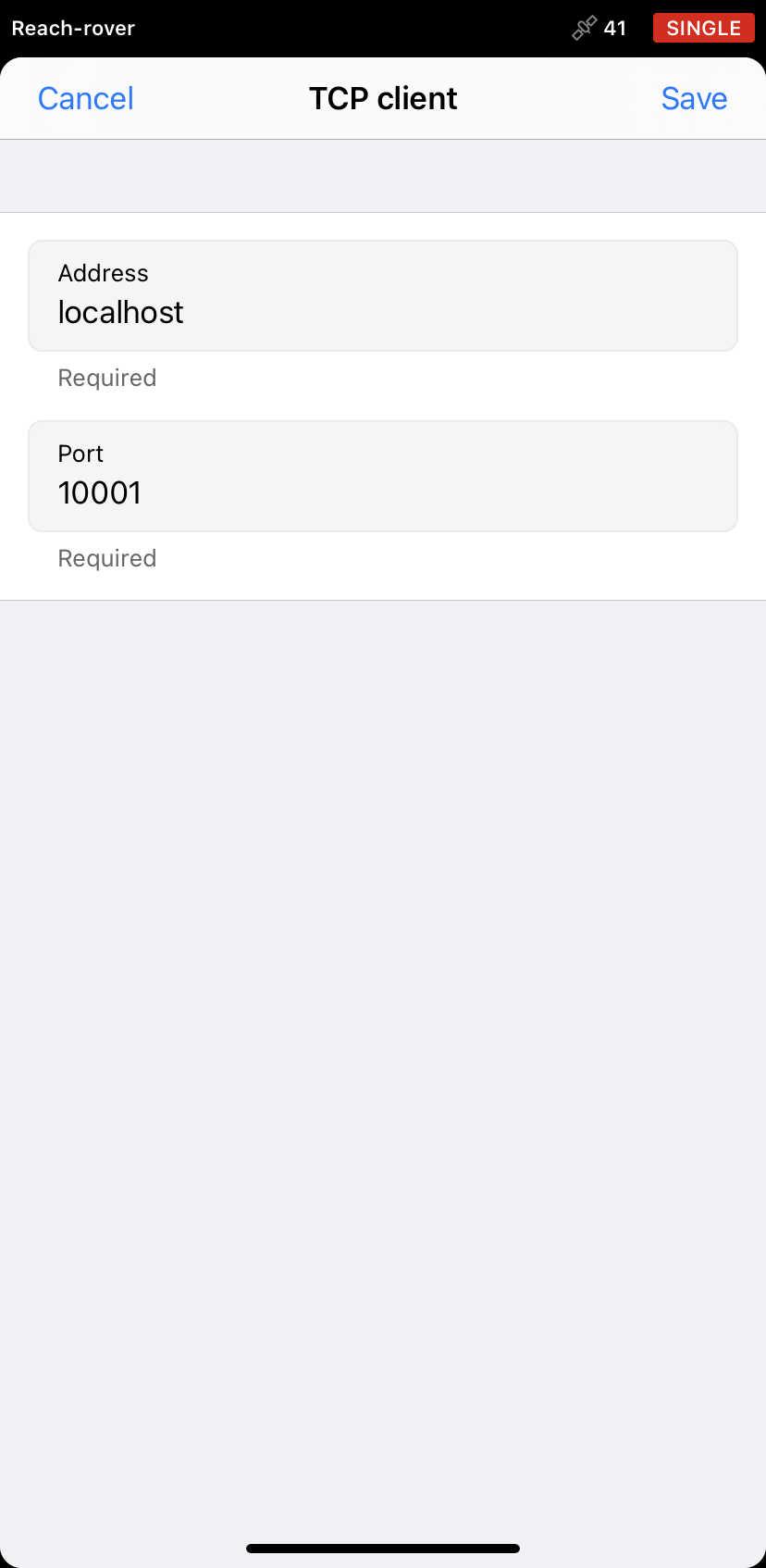
-
Tippen Sie auf Speichern, um die Einstellungen zu übernehmen.
-
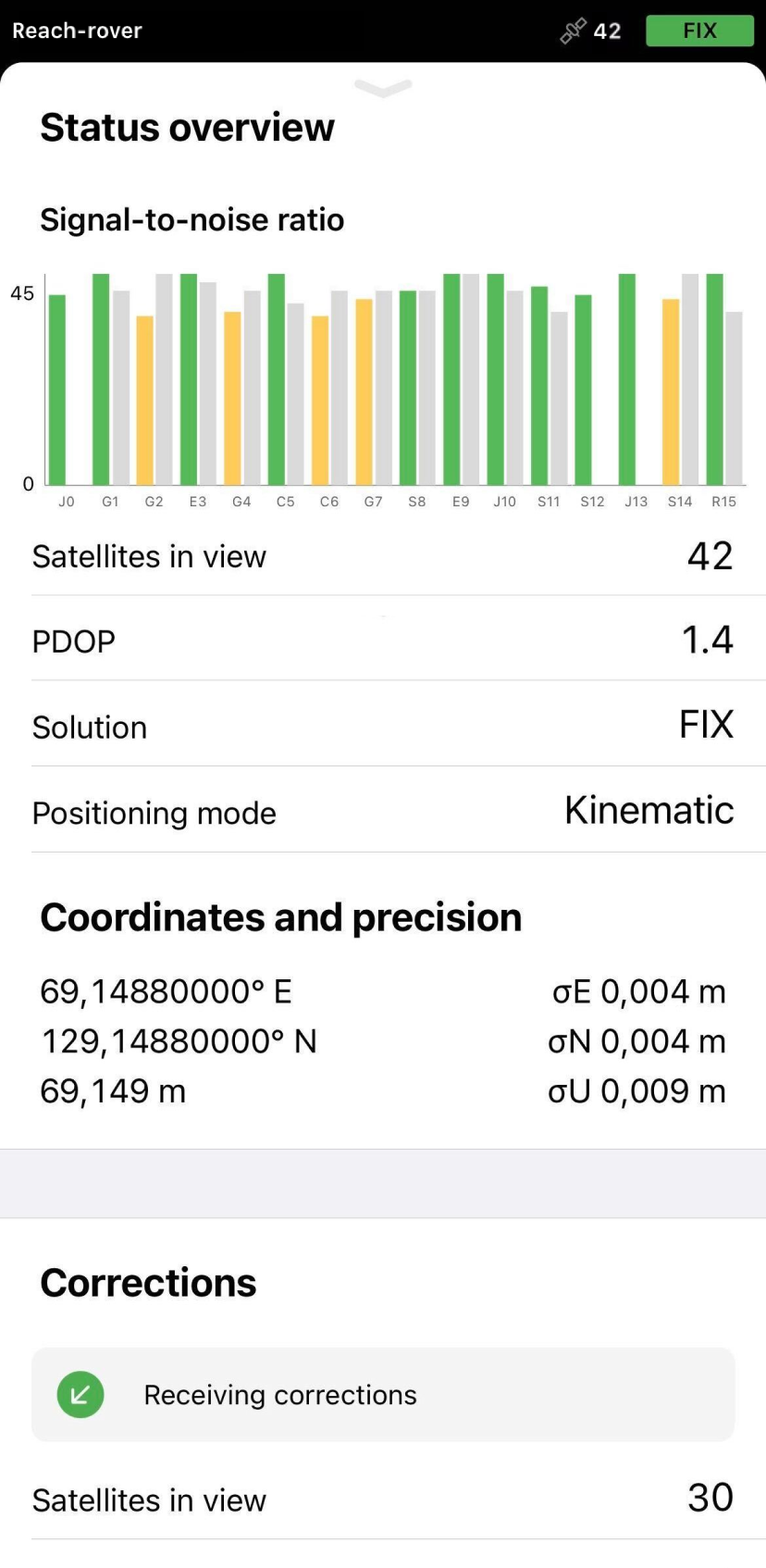
Gehen Sie zum Bildschirm Status. Wenn alles richtig konfiguriert ist, wird die Benachrichtigung Korrekturen empfangen.
Ergebnisse anzeigen
Sie können den aktuellen Lösungsstatus in der oberen rechten Ecke der Emlid Flow App sehen:
-
SINGLE bedeutet, dass der Rover eine Lösung gefunden hat, die sich auf seinen eigenen Empfänger stützt, und dass keine Basiskorrekturen angewendet werden. Für Reach-Empfänger empfehlen wir eine Aktualisierungsrate von 1 Hz auf der Basis und 5 Hz auf dem Rover.
-
FLOAT bedeutet, dass der Rover Korrekturen von der Basis erhält, aber nicht alle Mehrdeutigkeiten auflösen kann, und in diesem Fall liegt die Genauigkeit in der Regel im Submeterbereich.
-
FIX bedeutet, dass der Rover mit Hilfe von Korrekturen von der Basis die Mehrdeutigkeiten in seiner Positionsberechnung beseitigt und die Lösung mit Zentimetergenauigkeit erreicht hat.
Nach einer kurzen Zeitspanne erhält der Rover eine Fixed-Lösung (Zentimetergenauigkeit). Unter guten Bedingungen dauert es nur wenige Minuten, um eine Fixed-Lösung (Zentimetergenauigkeit) zu erhalten. Unter schwierigen Bedingungen kann es etwas länger dauern. Sobald der Rover den FIX erhält, sind Sie bereit für die Vermessung.
Auf dem Bildschirm Status können Sie auch den aktuellen Lösungsstatus sowie Ihre Position in Echtzeit abrufen.
Weitere Informationen zur Platzierung der Empfänger finden Sie in der Anleitung Antennenplatzierung.