Anleitung für senseFly
Übersicht
In diesem Tutorial finden Sie Informationen darüber, wie Sie PPK mit senseFly-Drohnen und Reach RS3 in der eMotion-Software durchführen können.
Eine Schritt-für-Schritt-Anleitung finden Sie auch in der senseFly-Wissensdatenbank.
Vorbereitung der Reach RS3-Daten
In diesem Teil wird erklärt, wie man Reach RS3 platziert, um Protokolle für PPK aufzuzeichnen.
Platzierung des Reach RS3-Empfängers
Das folgende Video zeigt, wie Sie die Reach RS2/RS2+ Basis über einem bekannten Punkt platzieren. Der Vorgang entspricht dem mit dem Reach RS3.
Weitere Möglichkeiten zur Platzierung der lokalen Basisstation finden Sie in der Anleitung Basiseinrichtung.
Im Folgenden werden die allgemeinen Schritte für die Platzierung des Basisempfängers beschrieben.
-
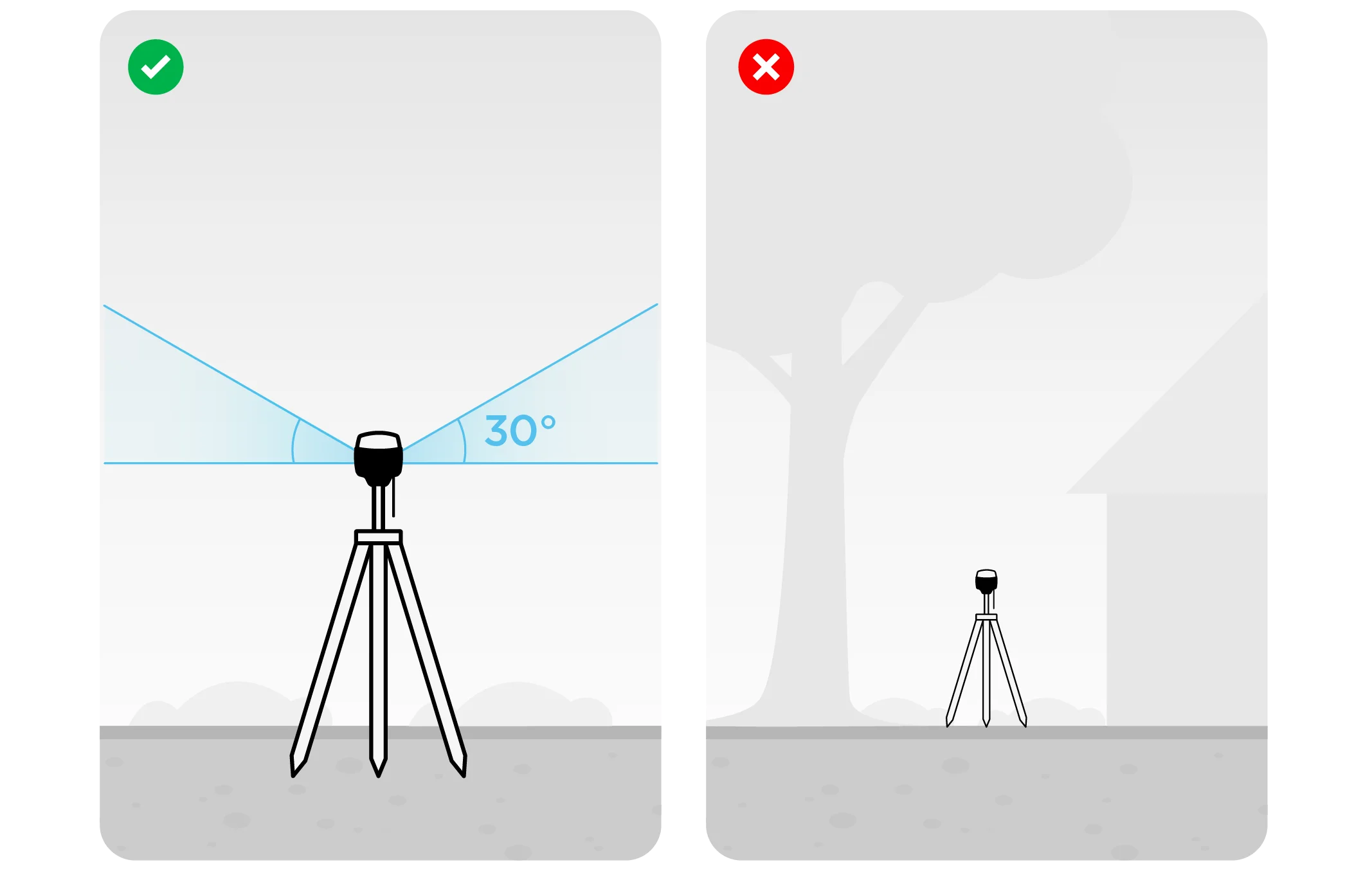
Stellen Sie sicher, dass Sie einen geeigneten Standort für die Reach RS3 Basisstation wählen. Schauen Sie sich die 2 Bilder unten an. Das linke Bild zeigt die wünschenswerten Bedingungen für den Basisstandort. Das rechte Bild ist ein Beispiel für schlechte Umgebungsbedingungen wie eine blockierte freie Sicht zum Himmel, mögliche Hindernisse oder Vegetation in der Nähe.
-
Stellen Sie sicher, dass Ihr Reach RS3 genau über dem markierten Punkt auf dem Stativ steht und nivelliert ist.
-
Wenn Sie die Basiskoordinaten manuell einstellen, messen Sie den Höhenversatz der Antenne.
noteDie Antennenhöhe wird als der Abstand zwischen der Markierung und dem Antennenreferenzpunkt (ARP) gemessen.
Für den Reach RS3 ist die Antennenhöhe der Abstand zwischen der Markierung und dem Boden des Reach RS3 (h in der Abbildung unten) plus 134 mm.

noteGenaue Basiskoordinaten werden für die Nachbearbeitung in eMotion benötigt.
Rohdatenprotokollierung
-
Öffnen Sie die Liste der WLAN-Netzwerke auf Ihrem Smartphone oder Tablet.
-
Stellen Sie eine Verbindung zum Netzwerk reach:xx:xx her.
-
Geben Sie das Netzwerkpasswort ein: emlidreach.
-
Wählen Sie den Reach RS3 aus der Liste der verfügbaren Geräte in der Emlid Flow App.
-
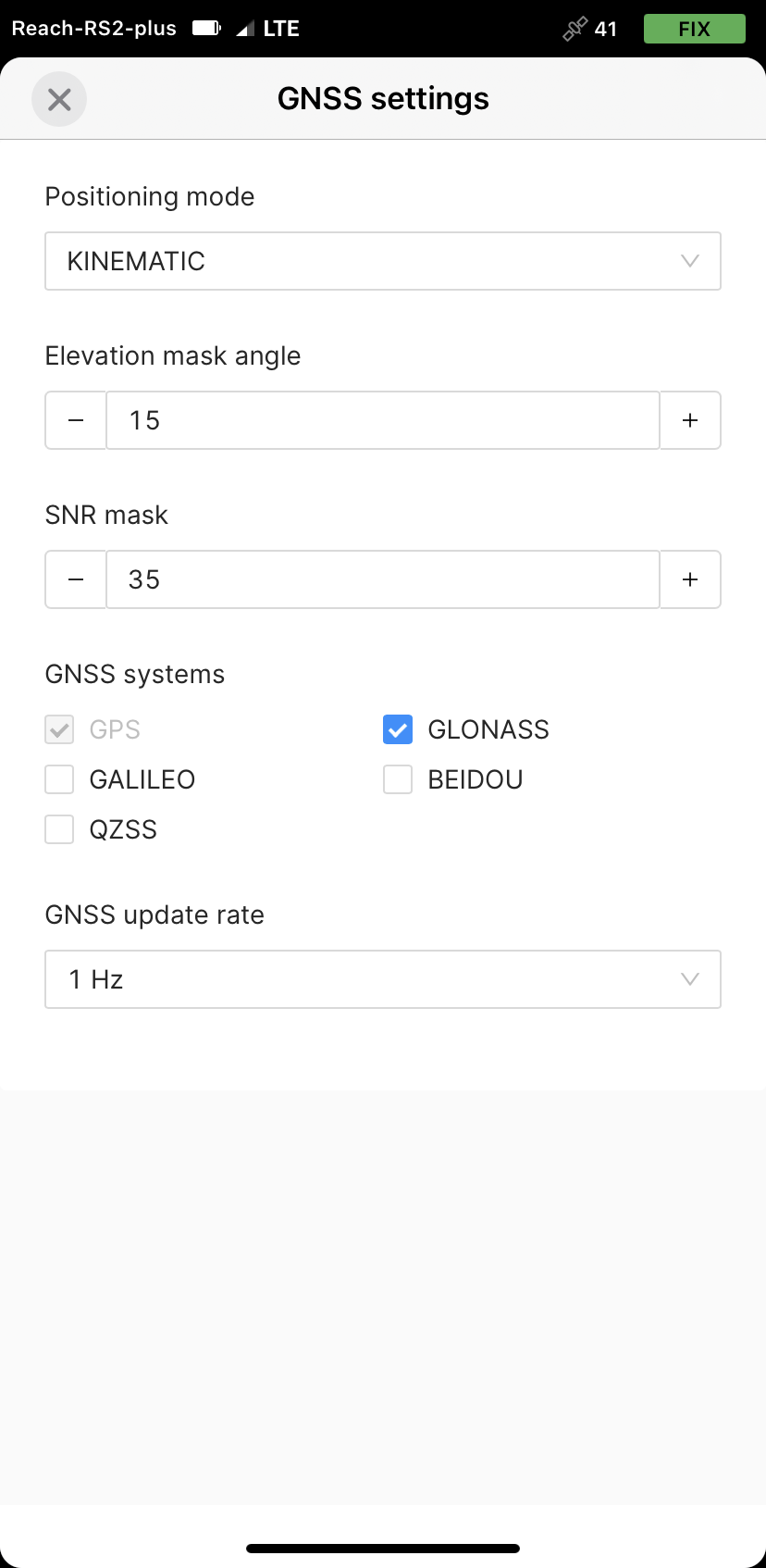
Tippen Sie auf dem Bildschirm Einstellungen auf GNSS-Einstellungen.
-
Wählen Sie die GNSS-Konstellationen wie folgt.
noteUnsere Standardempfehlung ist, alle GNSS mit 1 Hz zu aktivieren.
-
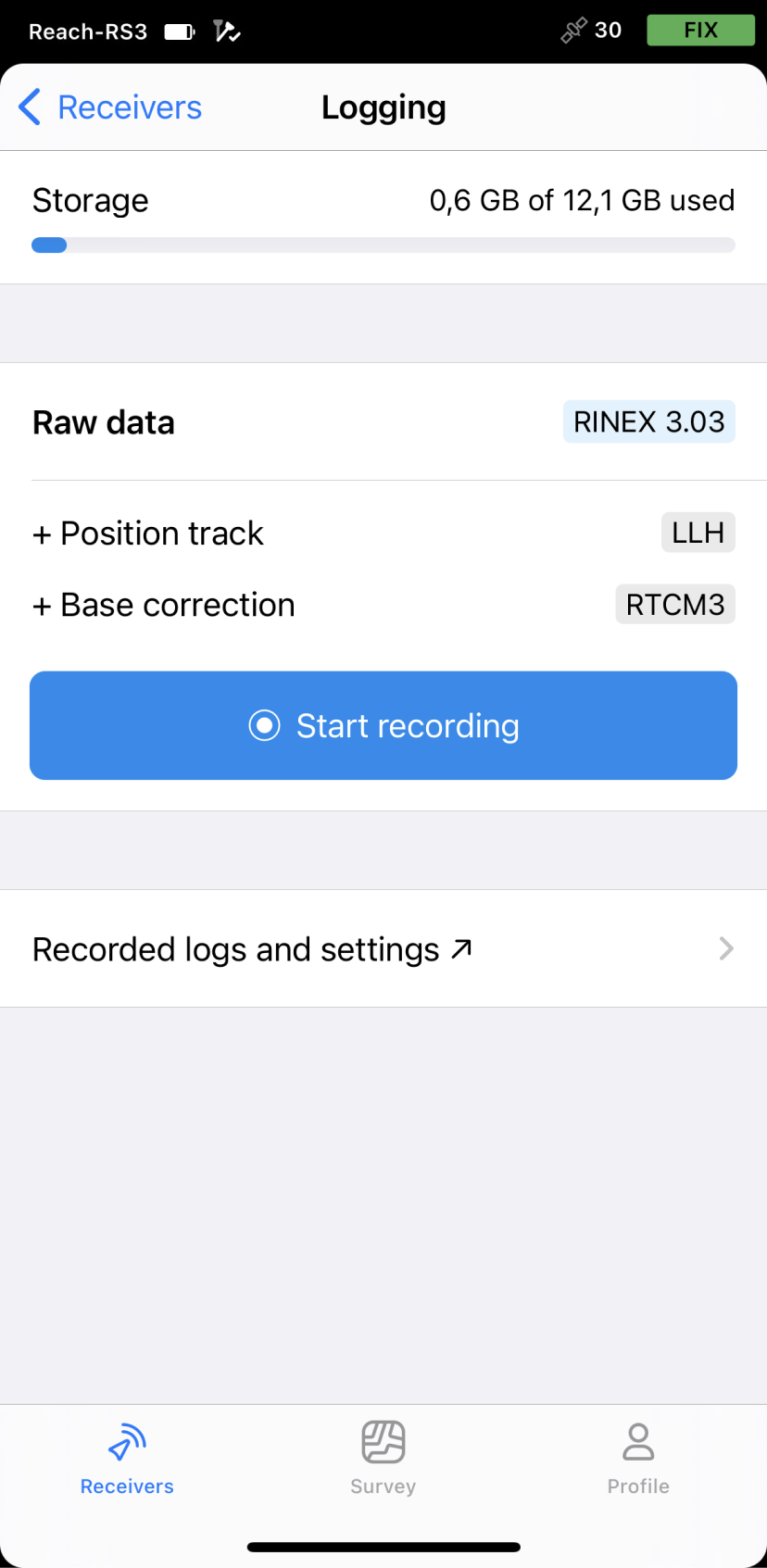
Gehen Sie zurück zum Bildschirm Empfänger (Receiver) und tippen Sie auf Protokollierung (Logging).
-
Tippen Sie auf die Schaltfläche Aufgezeichnete Protokolle und Einstellungen.
-
Um die Protokollierung zu konfigurieren, tippen Sie auf die Schaltfläche Einstellungen.
-
Wählen Sie im Dropdown-Menü Format and presets [Format und Voreinstellungen] die Option UBX. Übernehmen Sie die Änderungen.
Sobald die Reach RS3-Basis mit der Datenprotokollierung beginnt, können Sie Ihr eBee im Standalone-Modus fliegen.
Rohdatenprotokoll konvertieren
-
Herunterladen der RTKLIB QT Apps.
-
Laden Sie Rohdateien von Reach auf Ihren PC herunter.
-
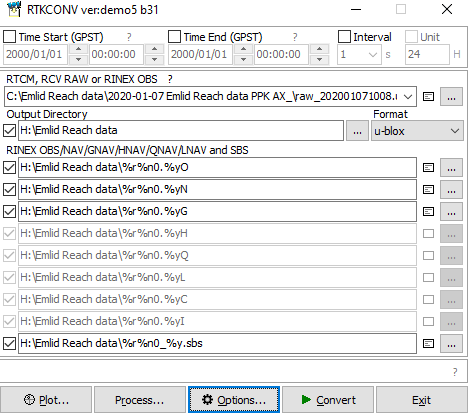
Starten Sie RTKLIB RTKConv.
-
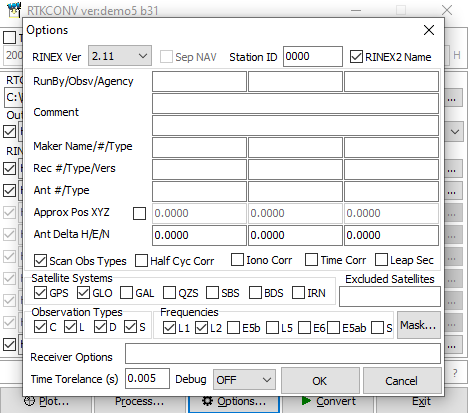
Drücken Sie die Taste Optionen.
-
Wählen Sie RINEX Version 2.11.
-
Schalten Sie die Satelliten-Systeme ein, die Sie benötigen.
-
Drücken Sie OK.
-
Fügen Sie Ihr Rover-Rohprotokoll in das erste Feld ein und wählen Sie das Ausgabeverzeichnis.
-
Wählen Sie das Format Ihres Protokolls im Dropdown-Menü. Format auf u-blox einstellen.
-
Drücken Sie Konvertieren.
-
Nun können Sie mit der Nachbearbeitung Ihrer Protokolle in eMotion3 fortfahren.
Nachbearbeitung mit eMotion
-
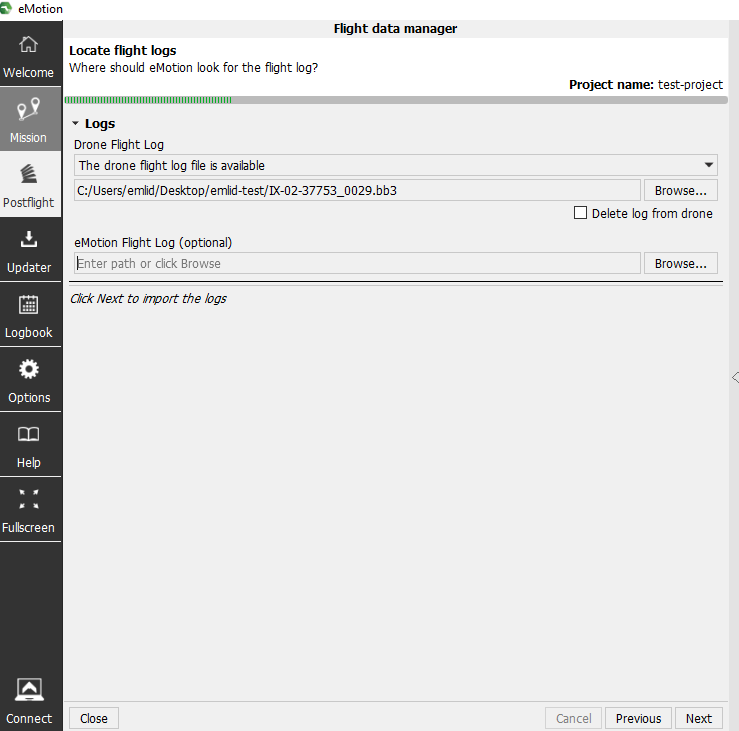
Starten Sie eMotion3 und wählen Sie Post Flight FDM (Flight Device Manager).
-
Erstellen Sie ein Projekt und importieren Sie die Flugprotokolle. Gehen Sie weiter zum Tab „RTK/PPK-Arbeitsablauf“.
-
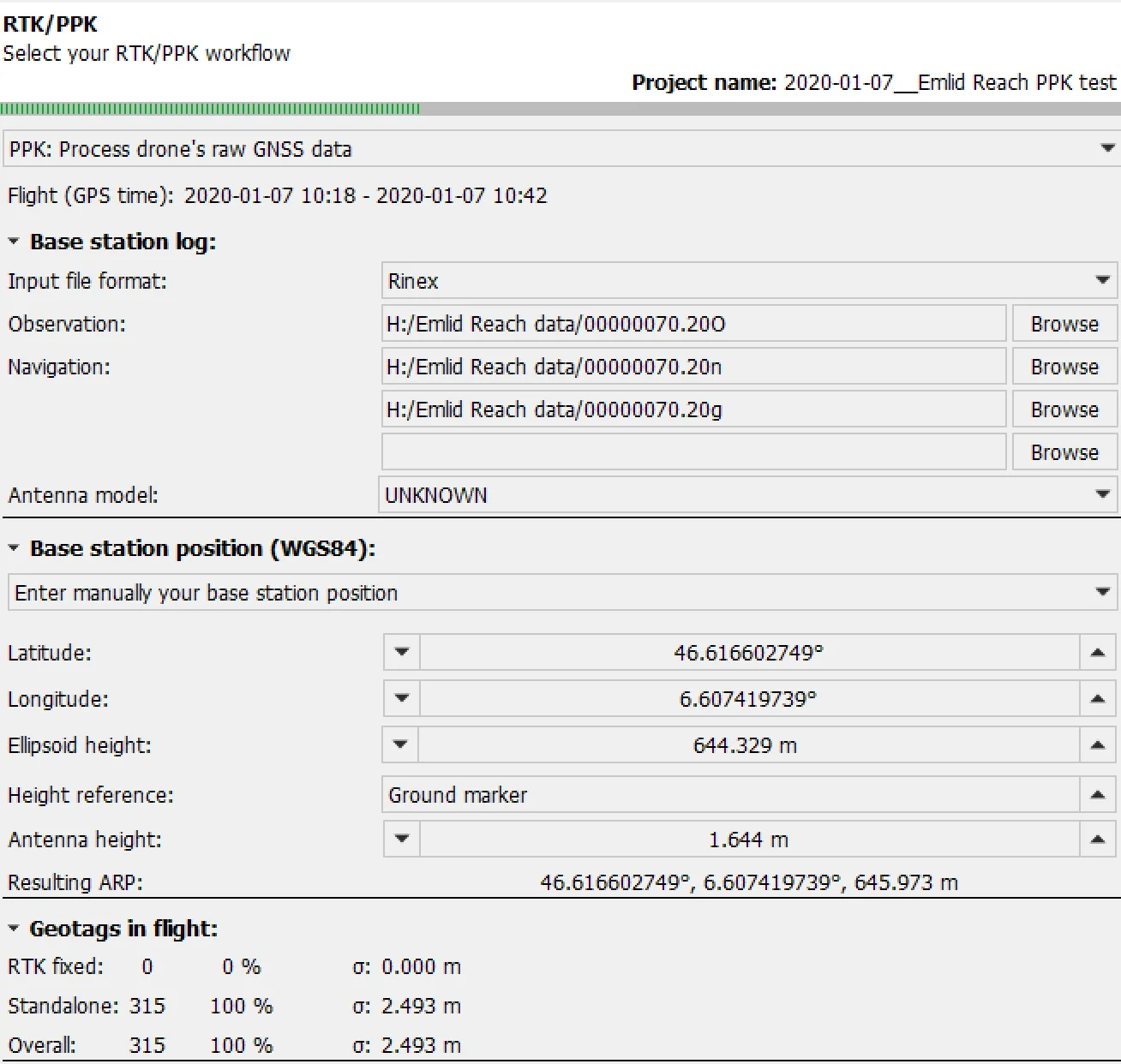
Setzen Sie das Format der Eingabedatei auf RINEX.
-
Wählen Sie neu konvertierte RINEX O-, N- und G-Dateien aus der Reach RS3-Basis.
-
Setzen Sie das Antennenmodell auf UNBEKANNT (UNKNOWN).
-
Füllen Sie das Feld „Basisposition” mit den bekannten Koordinaten des markierten Bodenpunktes (Bodenmarkierung).
-
Setzen Sie die Höhenreferenz auf die Bodenmarkierung.
-
Geben Sie die gemäß den Erläuterungen in diesem Schritt berechnete Antennenhöhe für den Empfänger ein.
-
Tippen Sie auf „Weiter (Next)”, um die Lösung zu berechnen.
.
-
Sobald die berechnete Lösung abgeschlossen ist, werden die Geotags auf der Grundlage der RINEX-Datei mit korrigierter Basisposition nachbearbeitet.

- Fahren Sie mit den restlichen FDM-Schritten fort, um den Postflight-Prozess abzuschließen.
Jetzt haben Sie die Protkolle von Reach RS3 und der eBee Drohne erfolgreich nachbearbeitet.