Configuración de la base y del rover
Obtenga las fichas prácticas en su smartphone para trabajar sobre el terreno
Esta guía muestra cómo configurar dos unidades Reach RS2/RS2+ como rover y base, y cómo hacer que funcionen por radio LoRa en el modo RTK.
Cambiar el nombre de los dispositivos Reach
Por defecto, todos los Reach RS2/RS2+ tienen el mismo nombre y lo primero que hay que hacer es cambiárselo para que sea más fácil distinguir entre la base y el rover sobre el terreno. Para cambiar el nombre de las unidades, siga los pasos que se indican a continuación:
-
Conéctese al Reach RS2/RS2+ que quiera utilizar como base.
:::consejo ¿Cómo se define Reach RS2/RS2+?
Cuando se conectes a su Reach, todos los LED parpadearán simultáneamente. Si necesita reprogramar los LEDs durante un levantamiento, toque la celda con el nombre de su receptor en la pantalla Receptores y acceda al botón Reprogramar LED.
-
Vaya a Configuración y pulse Información del receptor.
-
En Nombre del punto de acceso y el receptor, cambie el nombre de su Reach a reach-base.
noteEl nombre que introduzca también se utilizará como etiqueta de la red Wi-Fi cuando Reach esté en modo punto de acceso.
-
Pulse Guardar.
tipUtilice una pegatina especial del paquete para marcar la unidad.
-
Haga lo mismo con el segundo Reach RS2/RS2+. Sin embargo, use el nombre reach-rover en lugar de reach-base.
Establezca su base
Ahora debe establecer la configuración RTK y la comunicación por radio LoRa entre la base y el rover. Empecemos por la base con los siguientes pasos:
-
Conéctese a la unidad base.
-
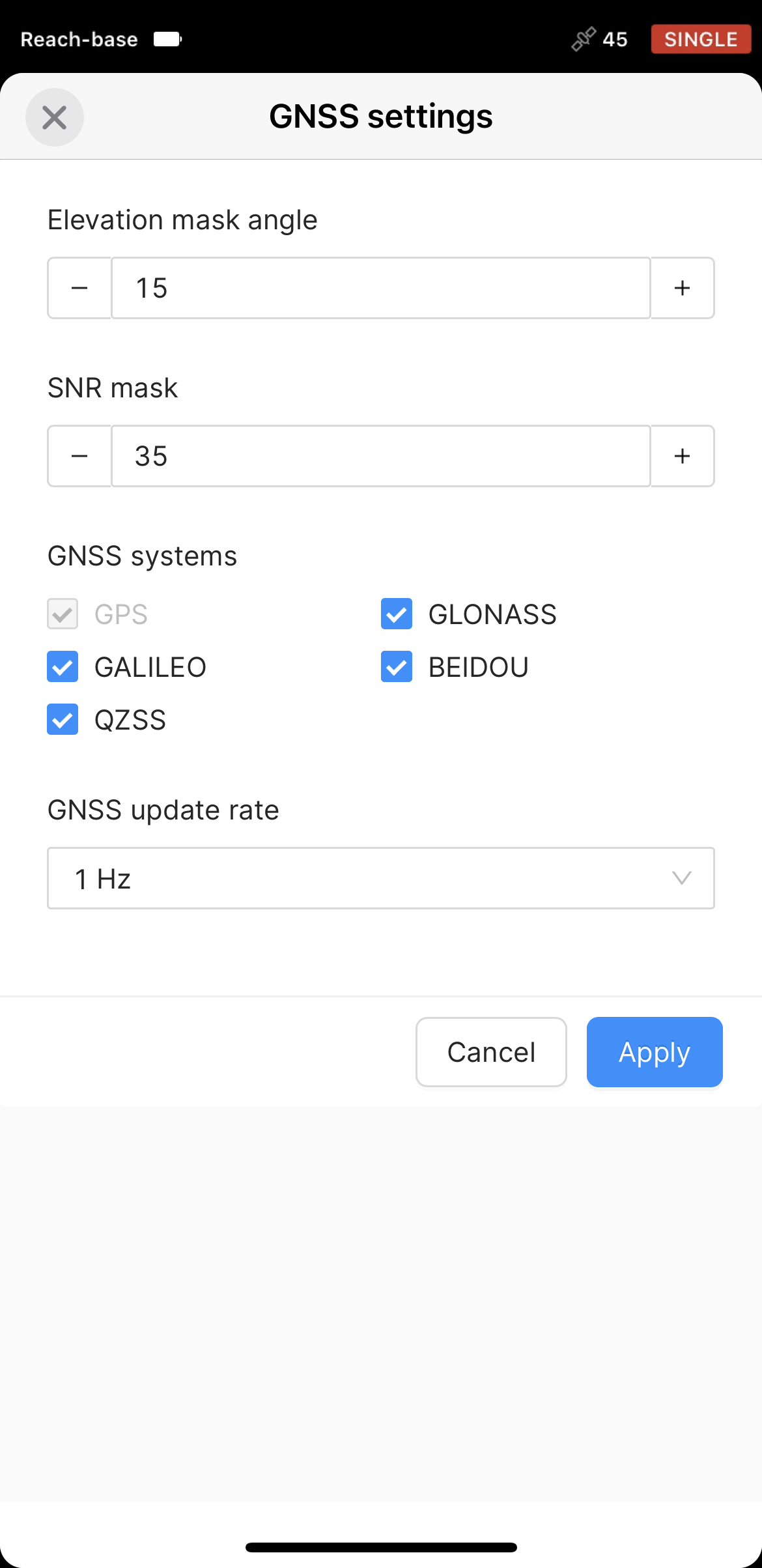
Vaya a Configuración y pulse Configuración GNSS. Elija cada uno de los sistemas de satélites.
-
Establezca la frecuencia de actualización GNSS en 1 Hz.
-
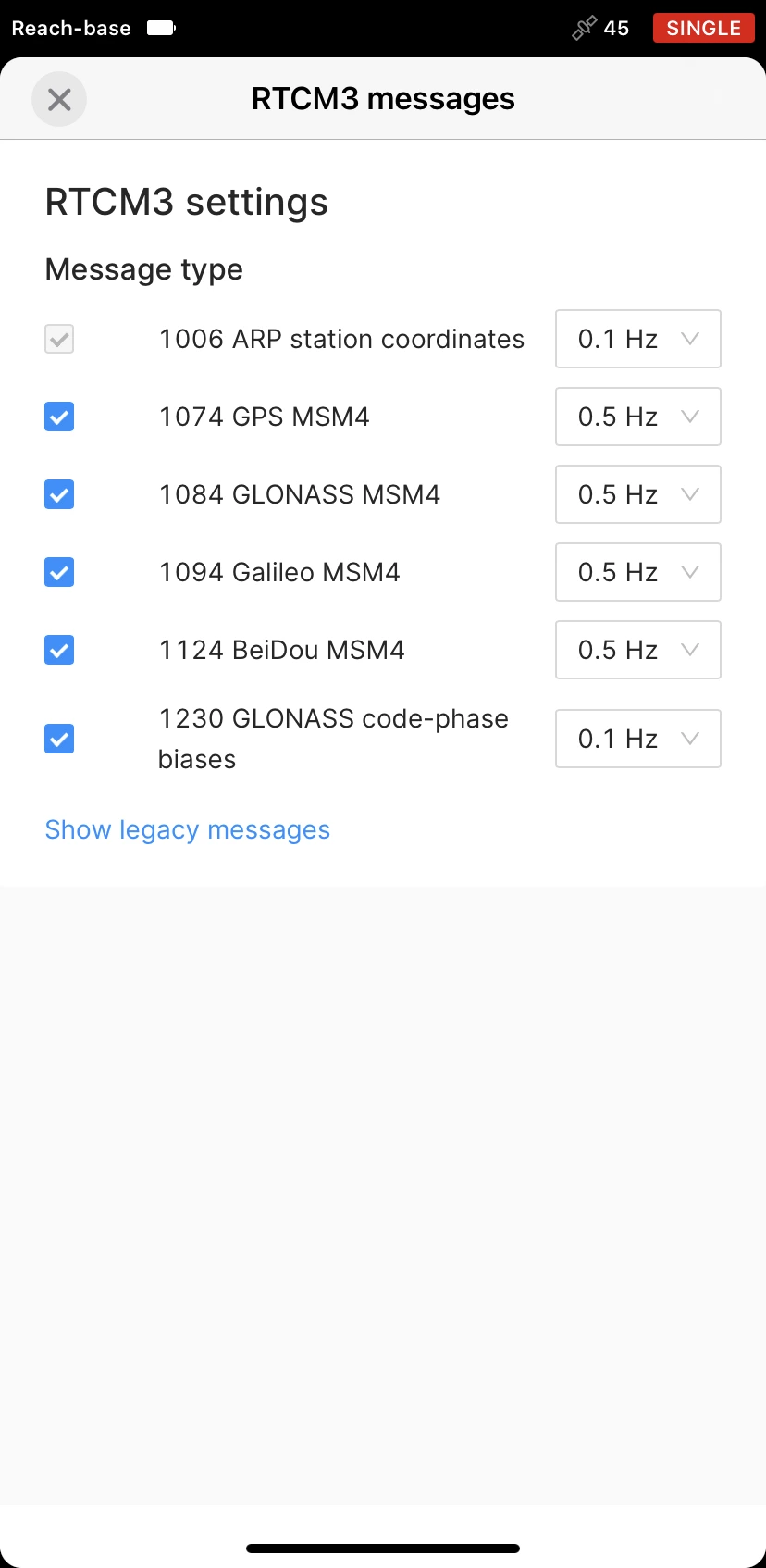
Vuelva a la pantalla Receptores. En la pantalla Configuración de la base, vaya a Mensajes de RTCM3.
-
Seleccione la salida de los mensajes RTCM3 como se indica a continuación:
- Coordenadas de la estación ARP en 0,1 Hz
- Otros mensajes MSM4 en 0,5 Hz
-
Pulse Aplicar.
-
Vuelva a la pantalla Receptores. En la pantalla Salida de la base, seleccione LoRa.
-
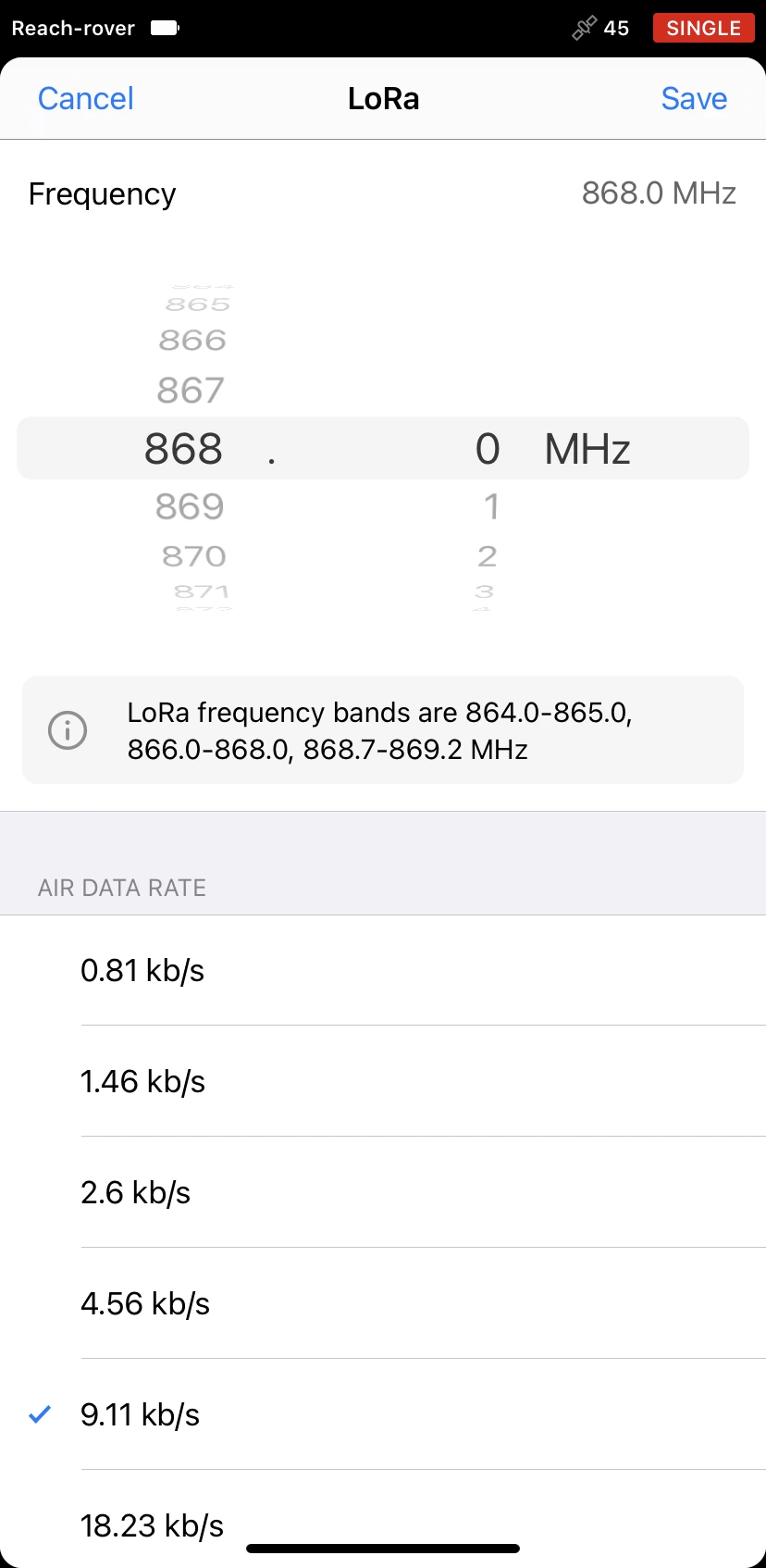
Pulse el botón Editar en la celda LoRa. Seleccione la frecuencia y ajuste la potencia de salida en 20 dBm.
dangerAsegúrese de seleccionar la frecuencia y la potencia de salida adecuadas según la normativa local. En caso de que existan restricciones, se aplicarán automáticamente limitaciones de banda de frecuencia.
-
Fije la velocidad de transmisión de datos en 9,11 kB/s. Pulse Guardar.
Ya puede proceder a configurar su unidad rover.
Configure su rover
Para completar la configuración de RTK y la comunicación por radio LoRa entre la base y el rover, debe configurar el rover. Siga los pasos que se indican a continuación:
-
Conectarse a la unidad rover.
-
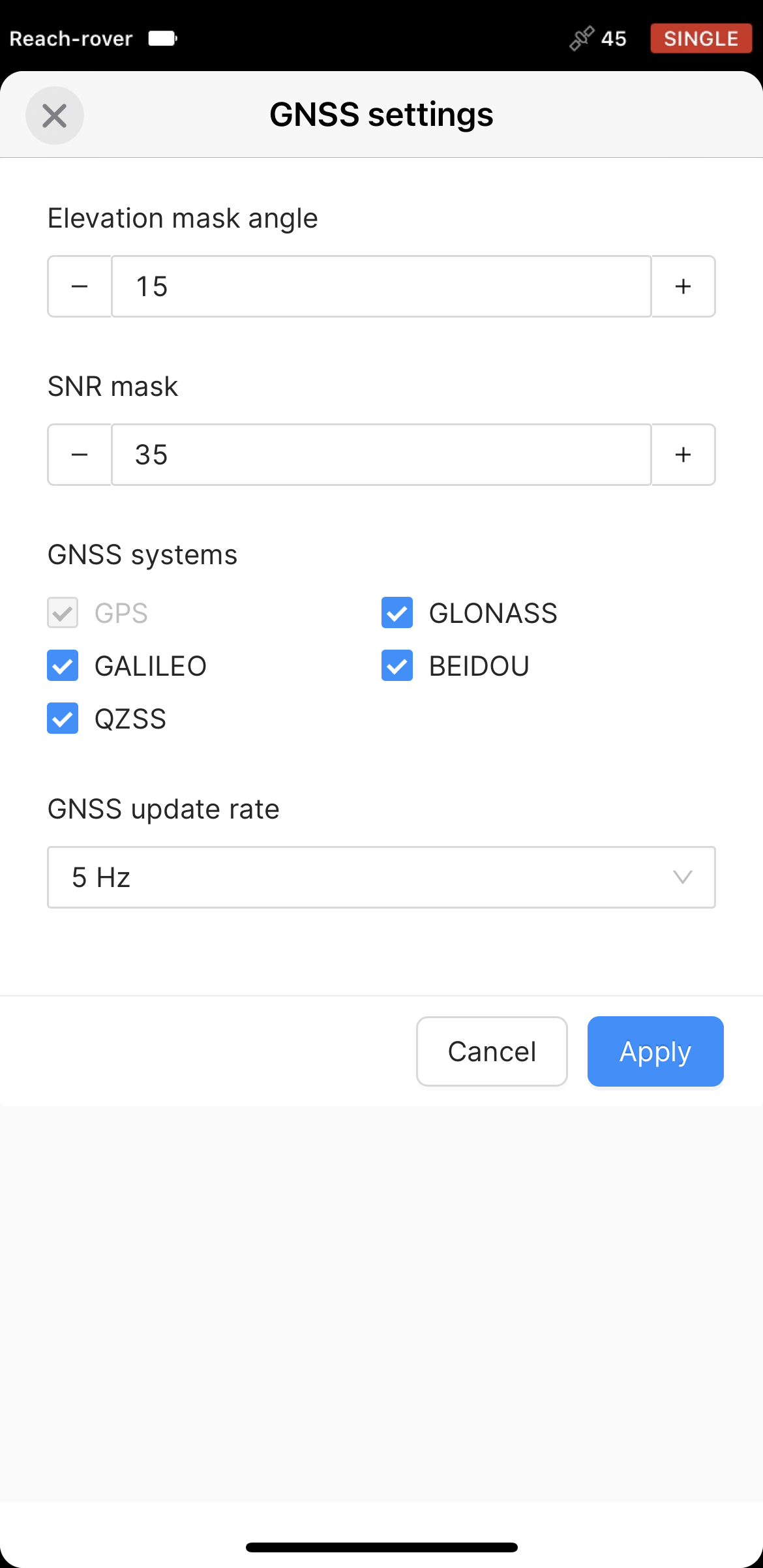
Vaya a Configuración y pulse Configuración GNSS.
-
Configure el modo de posicionamiento en Cinemático.
-
Seleccione los mismos sistemas GNSS que con la base y establezca una frecuencia de actualización GNSS de 5 Hz. Aplicar cambios.
-
Para configurar la radio LoRa en la unidad rover para recibir las correcciones, vuelva a la pantalla Receptores y pulse Entrada de correcciones.
-
Seleccione LoRa. Ajuste la misma frecuencia y velocidad de transmisión que con la base. Pulse Guardar.
Para asegurarse de que las correcciones pasan de la base al rover, puede colocar ambos receptores junto a la ventana durante unos minutos para tener visibilidad del cielo. A continuación, abra Emlid Flow, conéctese al rover y vaya a la pantalla Estado. Desplácese hasta la sección Correcciones y asegúrese de que su rover está recibiendo las correcciones.
Colocar las unidades Reach RS2/RS2
Cuando haya configurado los ajustes tanto en la base como en el rover, ya podrá salir a colocar la base y completar el proceso de configuración. Para los trabajos de campo, necesitará un trípode y un poste topográfico. Para colocar las unidades, siga los pasos que se indican a continuación:
Antes de colocar la base, asegúrese de que está en una zona abierta con una vista despejada del cielo. Esto garantizará una buena recepción de la señal y un buen número de satélites disponibles.
-
Monte la base Reach RS2/RS2+.
-
Nivele el trípode con precisión.
-
Coloque el rover en el poste.
-
Conecte las antenas LoRa a ambas unidades.
-
Encienda los receptores.
Para obtener más información sobre la colocación, consulte la guía Colocación.
Después de colocar la base en el trípode, puede completar su configuración:
-
Conectar a la base.
-
En la pantalla Receptores , pulse Configuración de la base.
-
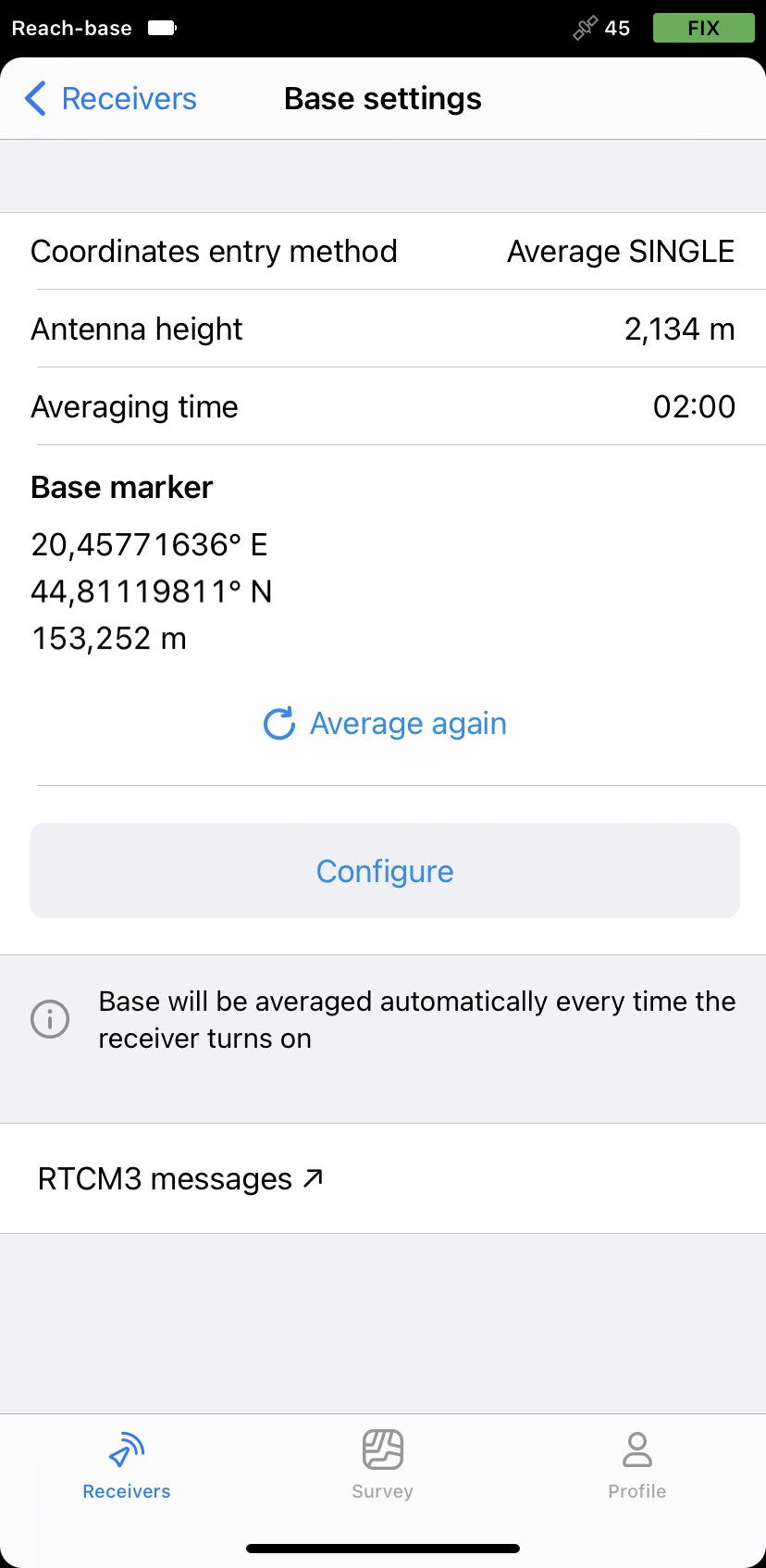
Para establecer la configuración de la base, pulse el botón Configurar.
-
Seleccione Media SINGLE como método de entrada de coordenadas base y establezca el tiempo promedio. Pulse Guardar.
dangerNo mueva la base mientras Reach esté acumulando datos.
noteLa posición promedio de la base se establece automáticamente cada vez que se enciende el receptor.
Tras acumular los datos, verá las coordenadas promedio en la sección Marcador base. Ahora su base está configurada y transmite las correcciones al rover.
Para obtener más información sobre los métodos de colocación de la base, consulte la guía Colocación de la base.
Ver los resultados
Cuando haya completado la configuración RTK por radio LoRa, podrá ver el estado actual de la solución en la esquina superior derecha de la aplicación Emlid Flow:
-
La frecuencia de actualización es un valor que muestra la frecuencia con la que el receptor calcula e informa de su posición. Para los receptores Reach, se recomienda tener una frecuencia de actualización de 1 Hz en la base y 5 Hz en el rover.
-
FLOAT significa que el rover recibe correcciones de la base pero no puede resolver todas las ambigüedades, y en este caso, la precisión suele estar en el nivel submétrico.
-
FIX significa que el rover, gracias a las correcciones de la base, resolvió las ambigüedades en su cálculo posicional y alcanzó la solución con una precisión de centímetros.
Tras un breve periodo de tiempo, el rover obtiene una solución fija. En buenos entornos, se tardará unos segundos en obtener una solución fija. En condiciones difíciles, puede tardar un poco más. Una vez que el rover obtiene FIX, ya está todo listo para la topografía.
También puede consultar el estado actual de la solución, así como su posición en tiempo real, en la pantalla Estado.
Cuando aprenda a configurar RTK por radio LoRa, también podrá descubrir cómo conectar su Reach a Internet y trabajar con el servicio NTRIP.