Сonfigurando o kit Reach UAV para cartografia com PPK
Este guia explica como configurar os seus receptores Reach para cartografia PPK com VANTs.
Recomendamos que você consulte o artigo Como funciona o PPK antes de começar.
Visão geral
Para configurar o kit Reach UAV para a cartografia PPK, é necessário o seguinte:
- Base Reach RS2/RS2+ ou Reach RS+
- Reach M2/M+ rover com antena GNSS
- Adaptador de sapata (HSA) para uma câmera
- Qualquer câmara que ofereça acesso à sapata (por exemplo, Sony, Canon, Nikon)
O Reach RS+ não pode funcionar como base para um rover Reach M2, uma vez que o Reach M2 requer correções multifrequência. No entanto, é possível utilizar o Reach RS2/RS2+ como base para o Reach M+. Note-se que, neste caso, você não obterá todas as vantagens do receptor multibanda. Pode saber mais sobre as diferenças entre receptores monobanda e multibanda no artigo Monobanda vs. multibanda.
Além disso, você vai precisar de alguns Pontos de Controle Terrestre (GCPs). Para colocar GCP, é necessária uma base e um rover, ou pode utilizar um receptor ligado a um NTRIP.
Neste guia, estamos nos concentrando principalmente na parte da integração do equipamento GNSS. No entanto, também é necessário um VANT e um PC com uma estação de controle terrestre e software fotogramétrico. Existem 2 requisitos principais para os VANTs:
- A presença ou capacidade de instalar uma câmara com um conector de sapata
- Funcionalidade que permita acionar a câmera: pela própria câmera ou pelo piloto automático
Configuração de hardware do Reach M2/M+
Conectando o Reach M2/M+ a uma câmera utilizando HSA
O HSA permite que o Reach M2/M+ grave com precisão uma marca de tempo em cada instante que a câmara tira uma fotografia.
A câmera precisa ter uma sapata para integração com o Reach M2/M+. Se você usa o DJI Mavic ou Phantom, que não oferece acesso à sapata, pode sempre usar trabalho com GCPs.
Para conectar o Reach a uma câmera com um adaptador de sapata, utilize o cabo JST-GH de 5 pinos fornecido com o Reach M2/M+. Ligue o conector da sapata numa sapata da câmera e o conector JST-GH na porta С1 do Reach M2/M+.


Ativação da câmera
Dependendo da sua aplicação, existem várias formas de acionar uma câmera.
-
Acionamento via câmera. Algumas câmeras dispõem de uma funcionalidade de lapso de tempo que permite tirar fotos em intervalos regulares. Se a sua câmera suportar esta opção, recomendamos que a utilize, uma vez que é a forma mais fácil e direta.
tipCada câmera utiliza portas diferentes para o disparo. Pode ser uma porta USB ou HDMI. Leia o manual da câmera para saber como acionar a câmera.
-
Acionamento via piloto automático. Existem várias opções para acionar a câmera através de pilotos automáticos:
-
Acionamento do obturador da câmera em waypoints. O piloto automático pode acionar o obturador sempre que o drone atingir um ponto de passagem. Se você usar um controlador de voo baseado no ArduPilot, consulte o guia Controle de câmera em missões automáticas do ArduPilot para obter mais detalhes.
-
Acionamento do obturador da câmera em intervalos regulares. Consulte o guia Configuração do obturador da câmera do ArduPilot para saber mais.
-
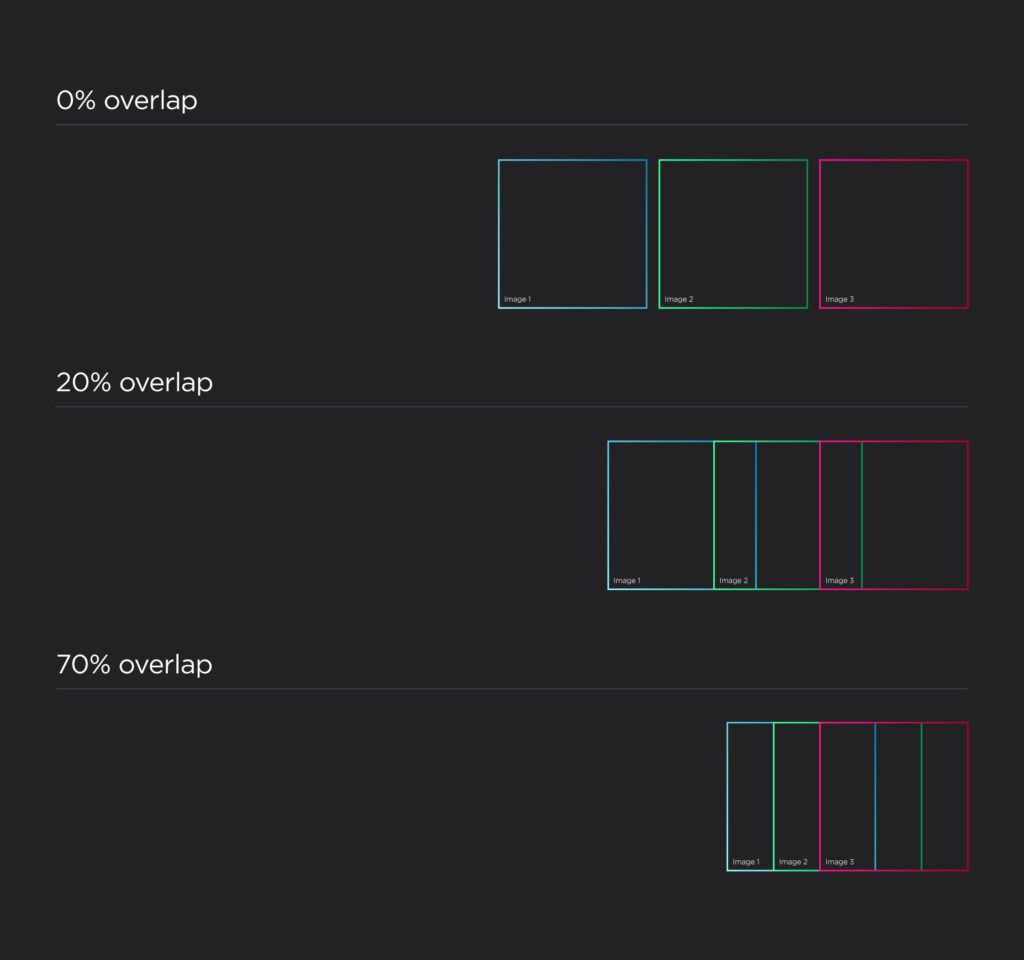
A maior parte do software da Estação de Controle Terrestre permite e até exige a preparação de um plano de missão antes do voo. É necessário configurar a câmera e o piloto automático de forma a obter imagens com sobreposições. Isto é necessário porque são necessários pontos comuns em imagens adjacentes para criar um mosaico ortogonal. Recomendamos que a sobreposição frontal seja, no mínimo, de cerca de 60% e a lateral de cerca de 30%.
Colocação da antena
A antena GNSS deve ser colocada num plano de terra. O plano de terra da antena deve ser condutor e ter pelo menos 70 x 70 mm. Uma placa metálica normal deve servir.
As antenas helicoidais não necessitam de um plano de terra. Ainda assim, um plano de terra pode melhorar significativamente a qualidade da observação.
Consulte o guia Colocação da antena para saber mais.
Isolando o Reach M2/M+ de potenciais interferências
Em alguns casos, poderá ser necessário isolar seu Reach para garantir a melhor qualidade de armazenamento de dados. A razão é que a potência de transmissão dos sinais GNSS é bastante baixa em relação ao possível ruído de outros componentes de hardware instalados no seu VANT. Isto significa que a intensidade do sinal da antena pode ser instável e, às vezes, até ser interrompido. As interrupções e perdas temporárias de sinal no receptor RTK são chamadas de salto de ciclo.
Para evitar saltos de ciclo, recomendamos que isole a unidade Reach M2/M+ e a ligue à terra para eliminar interferências. Além disso, os componentes RC, como os transmissores de rádio, também podem afetar o sinal. O Reach deve estar localizado o mais longe possível deles.
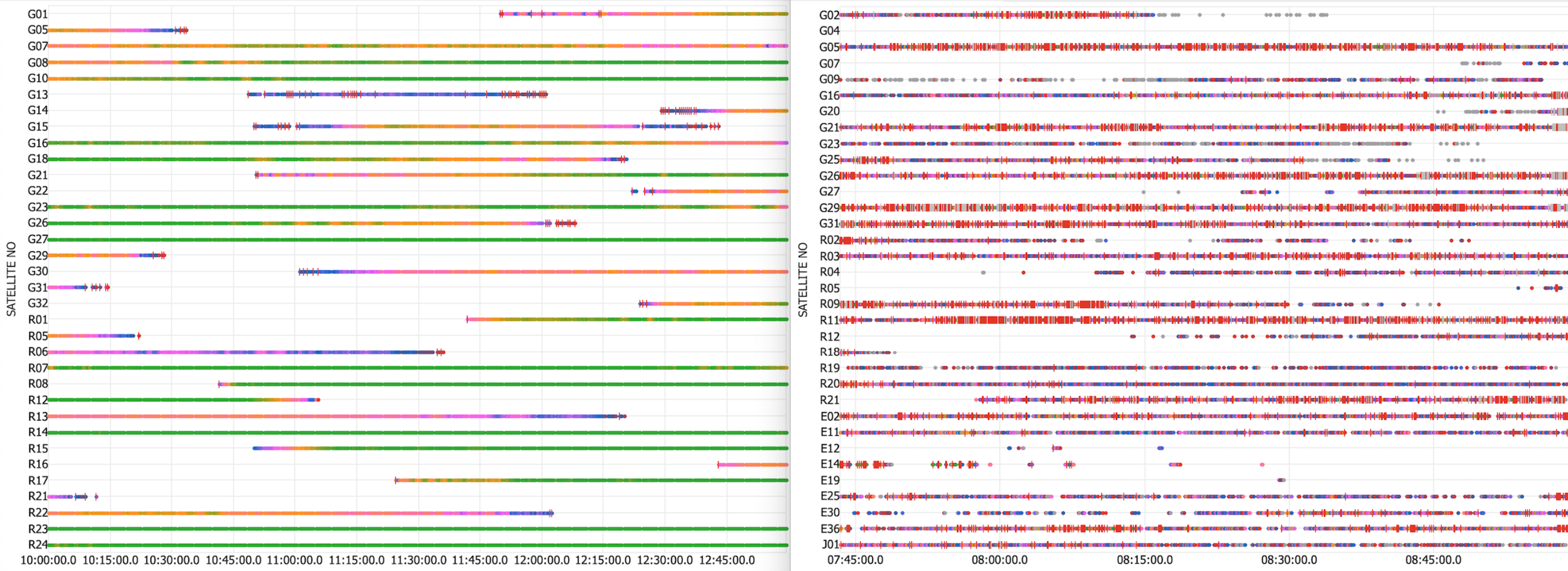
Os efeitos de uma má configuração do hardware são substanciais. A má qualidade do sinal com baixos valores de SNR, muitos saltos de ciclo criam problemas na obtenção de soluções fixas e na falta de marcas de tempo. Veja as figuras abaixo que demonstram exemplos de boa (a imagem da esquerda) e má (a da direita) recepção de satélite.
Você pode ler mais sobre a avaliação da qualidade do sinal nesta seção de nossos documentos
Crie um tópico no fórum da comunidade Emlid caso você tenha alguma dificuldade nesse estágio.
Configuração de base Reach RS2/RS2+/RS+
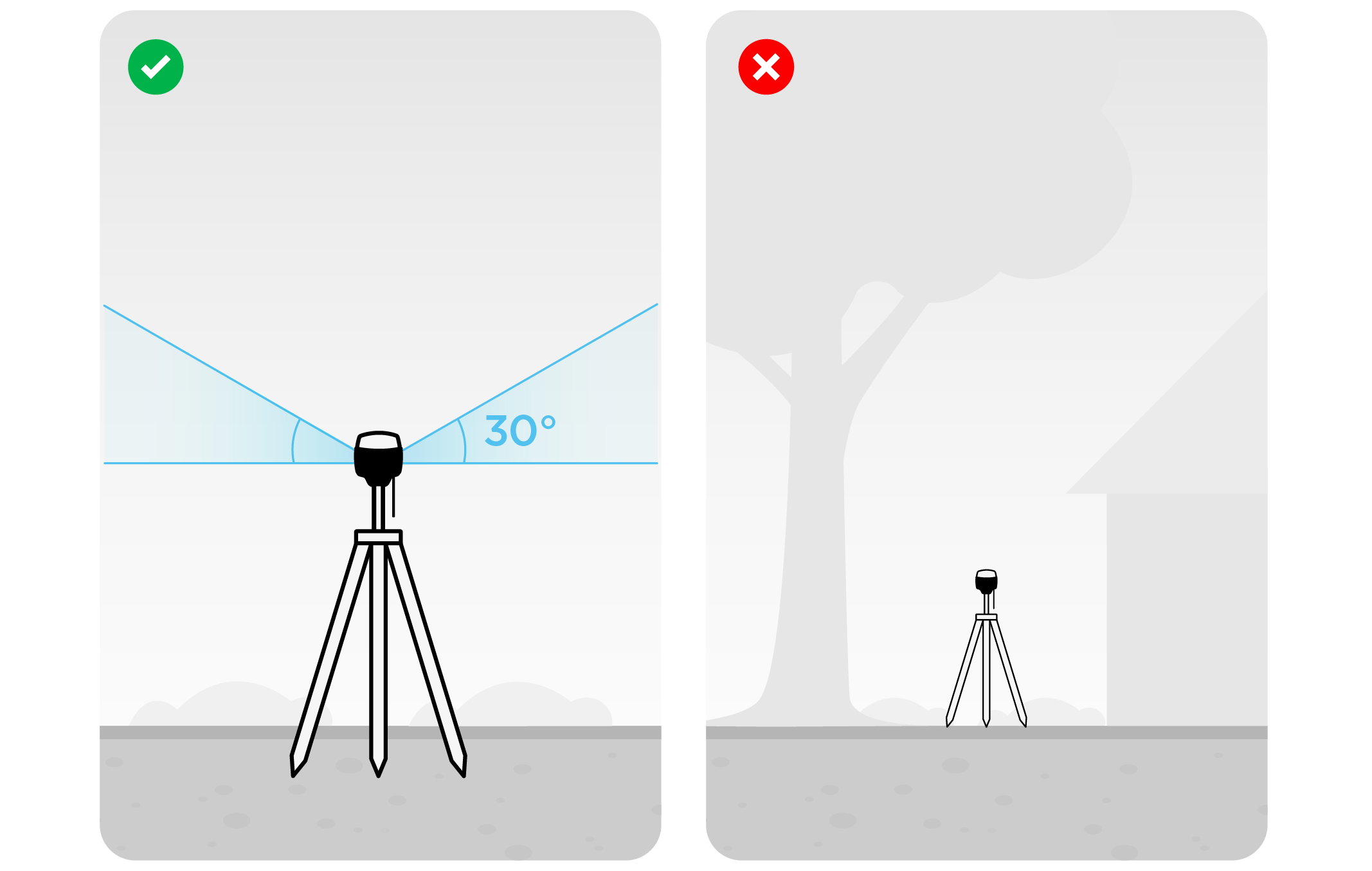
Veja a figura abaixo e escolha um local adequado para colocar a estação base Reach RS2/RS2+ ou Reach RS+. As regras básicas são:
- Bom ângulo do céu superior a 30 graus
- Longe de árvores e edifícios
- Não há electricidade nas proximidades
Consulte o guia Colocação da base para saber mais.
Configuração da base e do rover antes do voo
Configurações do rover Reach M2/M+
-
Alimente o Reach M2/M+ a partir de uma fonte de alimentação externa ou da bateria do drone.
tipConsulte o guia Fonte de alimentação para saber mais.
-
Acesse o Reach M2/M+ no Emlid Flow.
tipConsulte os guias Conectando-se ao Reach e Conectando o Reach à Internet para saber mais.
-
Vá para as configurações RTK e configure uma das seleções GNSS recomendadas e a taxa de atualização para o armazenamento de logs de marcas temporais:
note- Reach M2
- Reach M+
O Reach M2 rastreia os sistemas de satélites GPS, GLONASS, GALILEO, QZSS e BeiDou. Os dados podem ser gravados com uma taxa de atualização de 1 Hz, 5 Hz ou 10 Hz.
Para um voo de drone, é melhor definir a taxa de atualização em 10 Hz.
Seleção de GNSS Taxas de atualização permitidas pelo Reach M+ GPS + GLONASS + GALILEO + SBAS + QZSS 1 Hz GPS + GLONASS + QZSS 5 Hz GPS + GALILEO 5 Hz LLH 10 Hz -
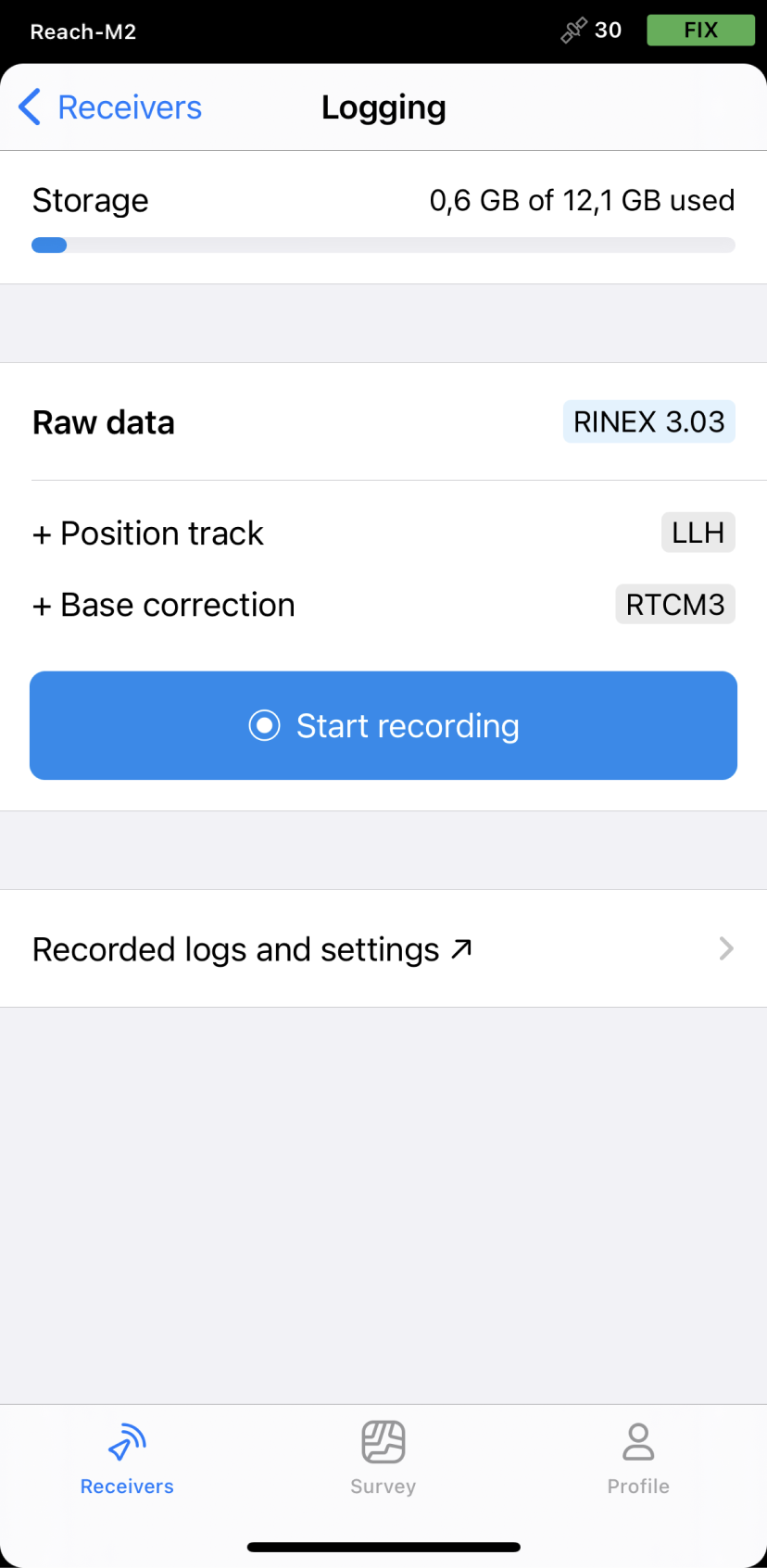
Ative o armazenamento de dados brutos na tela Armazenamento:
Configuração de base Reach RS2/RS2+/RS+
-
Ligue a unidade Reach RS2/RS2+ ou Reach RS+.
-
Acesse o receptor no Emlid Flow.
-
Vá para a tela Configurações GNSS.
-
Escolha o mesmo GNSS que para o Reach M2/M+ com uma taxa de atualização GNSS de 1 Hz.
-
Ative o armazenamento de dados brutos na tela Armazenamento.
Colocação de Pontos de Controle Terrestre
Os Pontos de Controle Terrestre (GCPs) são pontos com coordenadas conhecidas no terreno na área de interesse. Os GCPs ajudam normalmente a melhorar e a verificar a exatidão, a obter a escala e a orientação corretas do mapa. Além disso, são necessários para o posicionamento absoluto do seu mapa em relação ao mundo real que o rodeia.
Consulte o guia Colocação da base para saber mais sobre exatidão absoluta e relativa.
O Reach fornece coordenadas com precisão centimétrica em PPK. Além disso, se você colocar a base num ponto com coordenadas conhecidas, obterá as coordenadas com uma exatidão absoluta. Nesse caso, os GCPs podem ajudá-lo a verificar a exatidão.
Os GCPs devem ser claramente visíveis nas imagens do drone. Certifique-se de que a marca contrasta com o meio em volta e que é suficientemente grande. Coloque um bastão topográfico com um receptor exatamente no centro da marca para obter as suas coordenadas.
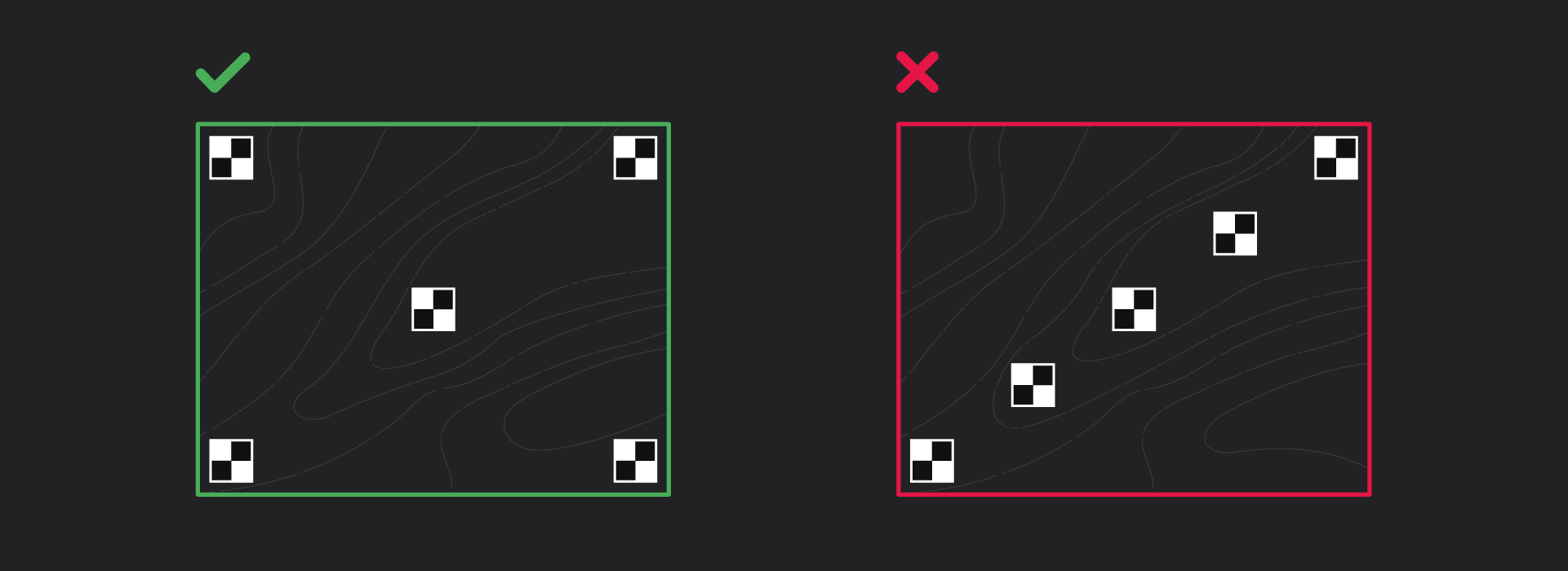
A quantidade suficiente de GCPs depende da área do local. Normalmente, é de 5 a 10 pontos. Existem algumas regras básicas para a colocação de pontos de controle:
- Eles devem ser distribuídos uniformemente na area onde o levantamento é realizado. Por exemplo, se você usa 5 pontos, defina um para cada canto e o último no centro da área
- Eles não podem estar na mesma linha
Além disso, é ideal se você tiver a possibilidade de colocar GCPs nos pontos mais altos e mais baixos do local. Isto ajuda a realizar a projeção plana correta.
É importante cumprir estes requisitos se você quiser obter a mesma exatidão em todo o gráfico.
Consulte o guia Colocação de GCPs para saber mais.
Voo de levantamento
Não demos muita atenção a este passo devido às diferenças entre definições de voo de diferentes modelos de drone. Por favor, verifique o manual do fabricante do seu drone antes do voo.
Depois de todas as configurações estiverem concluídas, você pode começar a voar com o seu drone.
Certifique-se de que a gravação de dados brutos nas unidades Reach M2/M+ e Reach RS2/RS2+ ou Reach RS+ esteja ativada antes do voo.
- O registro de dados brutos nas unidades Reach M2/M+ e Reach RS2/RS2+ ou Reach RS+ é ativado antes do voo.
- O acionamento da câmera está ativado. Acione a câmera e verifique a marca da última vez na tela Controle da câmera em Configurações no Emlid Flow.
Quando o voo estiver concluído, você pode desativar a gravação do log. Antes de desligar os dispositivos, aguarde até que o processamento dos logs esteja concluído.
Você pode baixar logs de dados brutos da base e do rover depois.
Como resultado de uma missão de mapeamento com o Reach, você irá obter o seguinte conjunto de dados:
- Registro de dados brutos de uma base
- Registro de dados brutos de um rover
- Conjunto de imagens de um drone
- Lista de GCPs
Agora você pode preparar o conjunto de dados para processamento posterior.