Integrazione ArduPilot
Questa guida illustra come configurare Reach per inviare la posizione ai piloti automatici ArduPilot.
Panoramica
Reach supporta l'output di coordinate con tecnologia RTK per Navio2 e Pixhawk. Per rendere questo possibile, abbiamo implementato un protocollo GPS personalizzato denominato ERB. Se necessario, è possibile utilizzare il formato NMEA standard del settore.
Il supporto ERB è incluso in ArduPilot a partire dalle seguenti versioni:
- ArduCopter 3.4
- ArduPlane 3.5.0
- APMrover 3.1
È possibile consultare la descrizione del protocollo ERB qui.
Configurazione consigliata
Si consiglia la seguente configurazione:
- Navio2, Edge o Pixhawk con il firmware ArduPilot. È preferibile utilizzare l'ultima versione stabile.
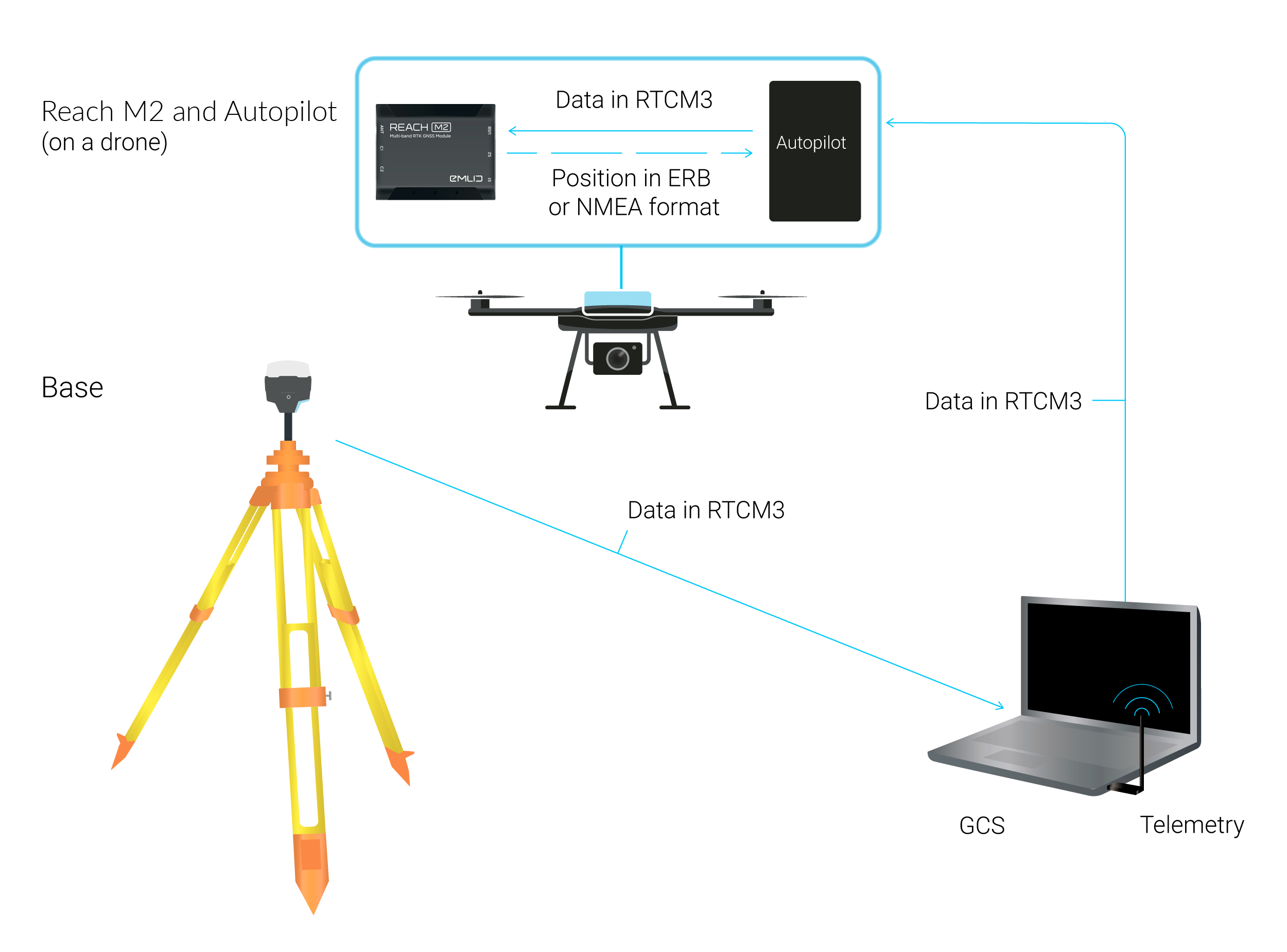
- La stazione base è l'unità Reach RS2/RS2+ o Reach RS/RS+ in modalità AP Wi-Fi, configurata come server TCP.
- GCS (Ground Control Station) è un computer portatile con Mission Planner (versione 1.3.35 e successive), collegato alla rete Wi-Fi ospitata dalla base Reach.
- Connessione telemetrica fornita tramite una radio seriale.
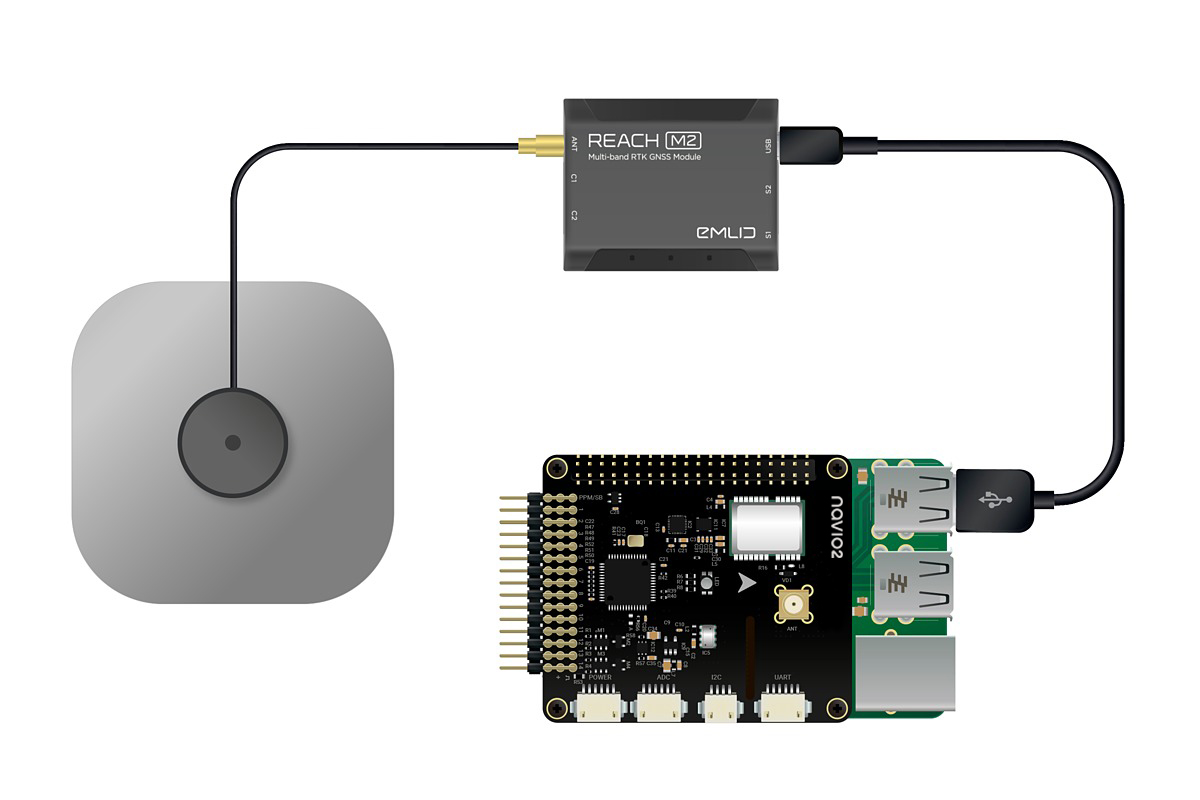
- L'unità rover Reach M2 o Reach M+ è montata su un drone e collegata a Navio2 o Pixhawk tramite il cavo da 6P a 6P. Questo tipo di connessione risolverà tre problemi contemporaneamente: alimentare Reach, consentire alla scheda ArduPilot di trasmettere le correzioni di base e consentire a Reach di restituire la soluzione RTK.
La seguente guida mostrerà come configurare Navio2 o Pixhawk e Reach per funzionare in questa configurazione. Se si desidera modificare il flusso di lavoro, dovrebbe essere facile farlo, poiché ogni parte del sistema è indipendente dalle altre.
Collegare Reach al pilota automatico
Per trasmettere i dati di posizione da Reach, collegarlo al proprio pilota automatico. È possibile collegare il proprio Reach a Pixhawk, Navio2 ed Edge.
Collegare Reach a Pixhawk
Per fornire la soluzione RTK a Pixhawk, Reach deve essere collegato tramite una porta seriale. È possibile farlo collegando il cavo seriale alla porta JST-GH del ricevitore Reach e al connettore Serial 4/5 di Pixhawk.
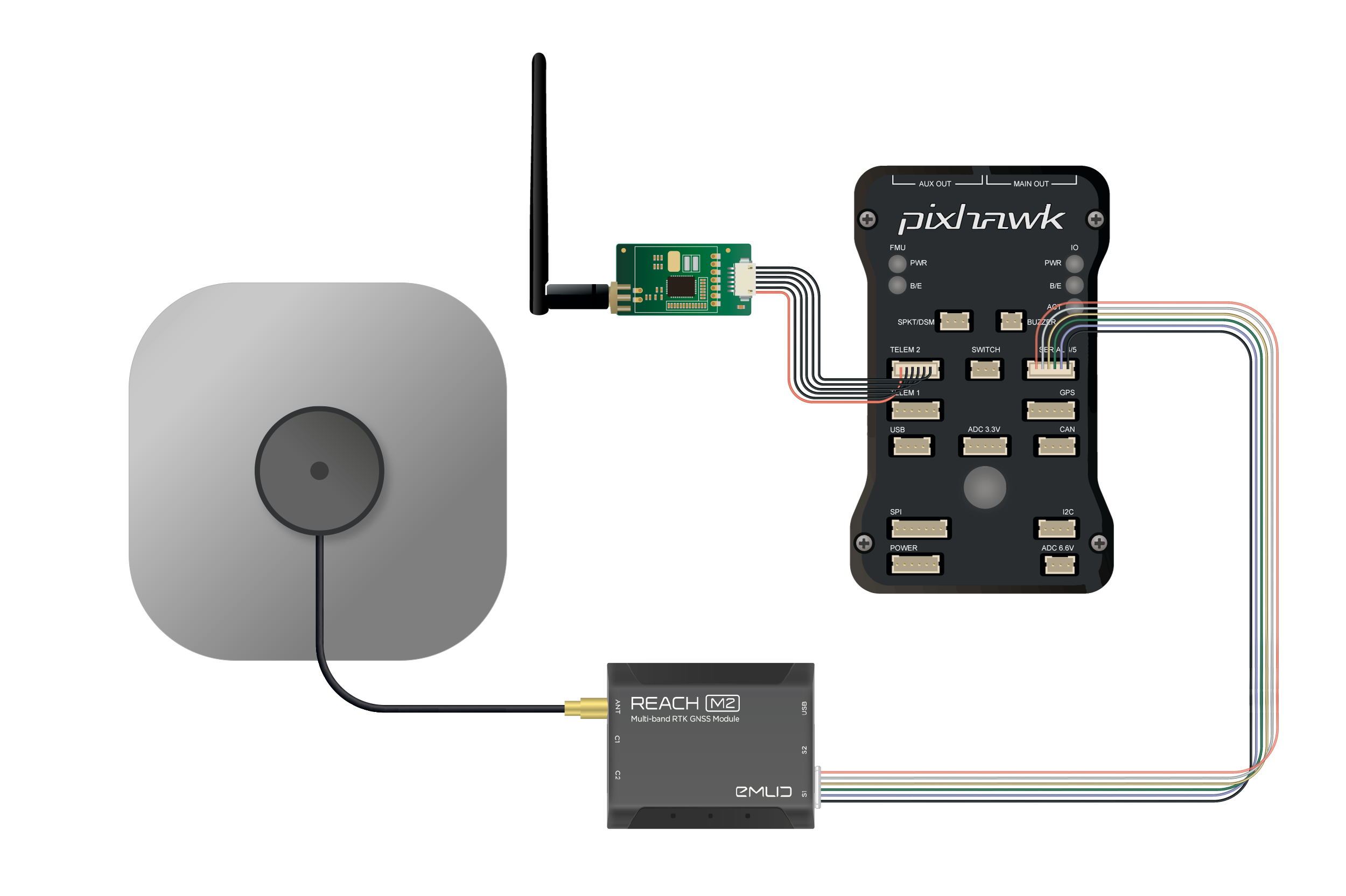
Si consiglia di alimentare Reach da una fonte di alimentazione esterna. In alcuni casi, Pixhawk potrebbe non fornire energia sufficiente per Reach.
Collegare Reach a Navio2
È possibile collegare il ricevitore Reach a Navio2 in due modi: tramite UART o USB. Per fornire a Navio2 la soluzione RTK tramite UART, collegare la porta JST-GH del ricevitore Reach alla porta UART di Navio2.
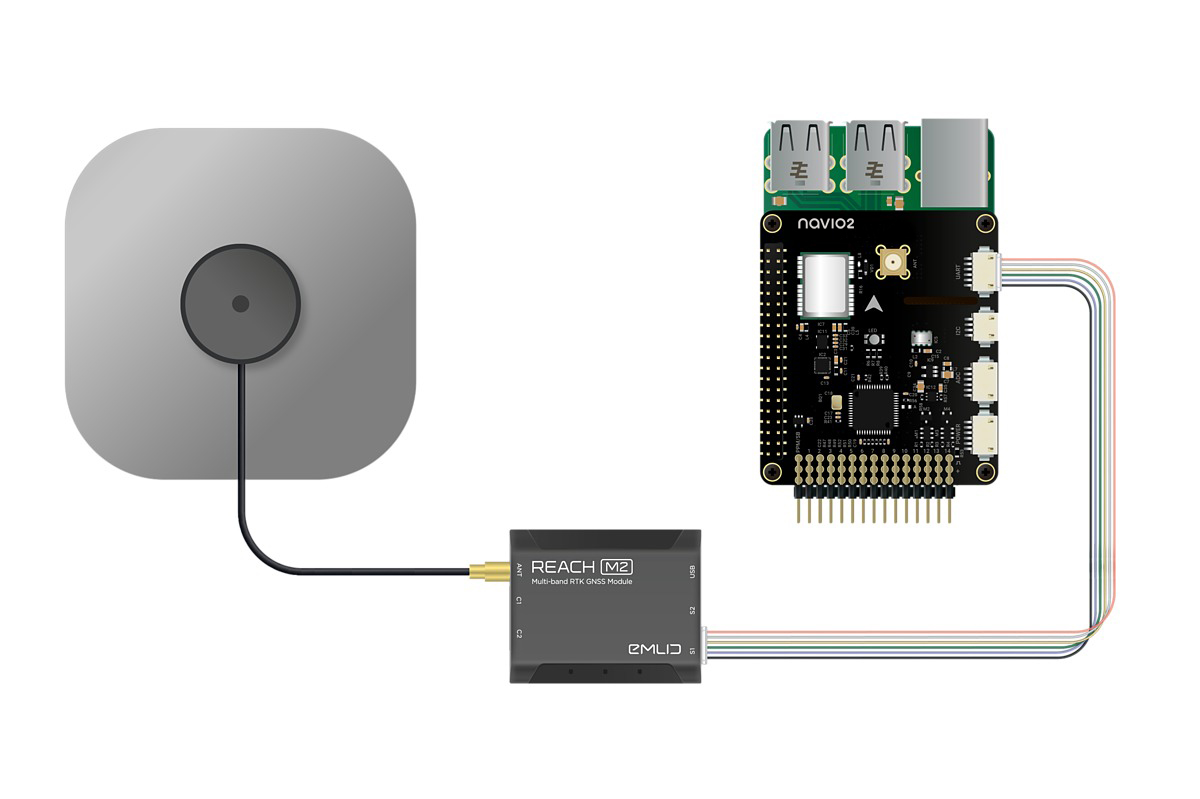
Per lavorare con l'USB, collegare la porta Micro-USB del ricevitore Reach a una porta USB del Raspberry Pi.
Configurare il modulo Reach per funzionare con ArduPilot
Configurare il proprio rover
La connessione seriale viene utilizzata per accettare le correzioni di base e inviare la soluzione contemporaneamente.
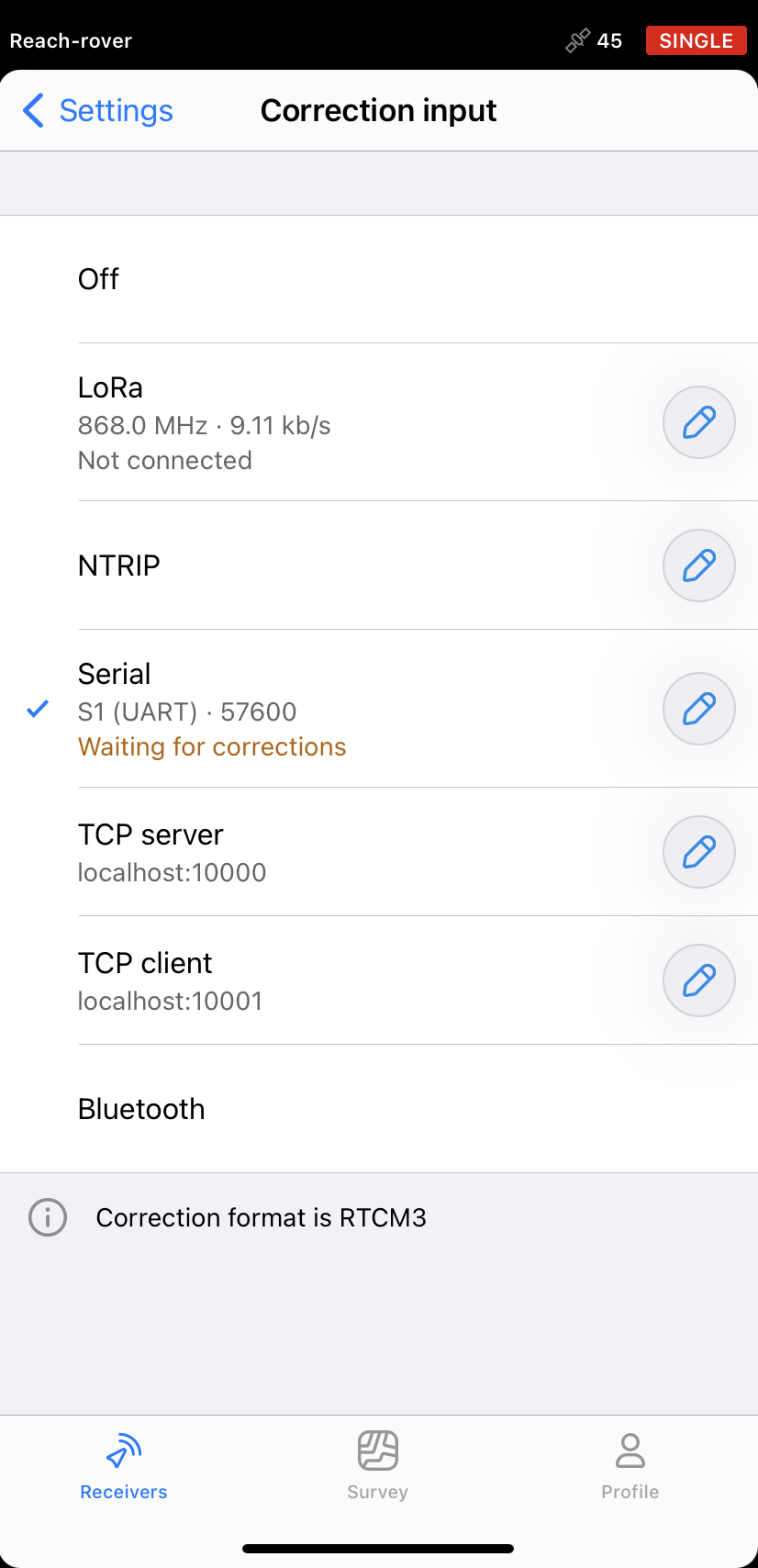
Innanzitutto, configurare l'input delle correzioni:
-
Aprire Emlid Flow e collegarsi al proprio rover.
-
Toccare Input di correzione (Correzione in ingresso).
-
Selezionare Serial (Seriale).
-
Scegliere S1 (UART) o USB a PC come porta.
-
Scegliere la velocità di trasmissione desiderata (predefinita 57600).
-
Toccare il pulsante Save (Salva) per salvare le impostazioni.
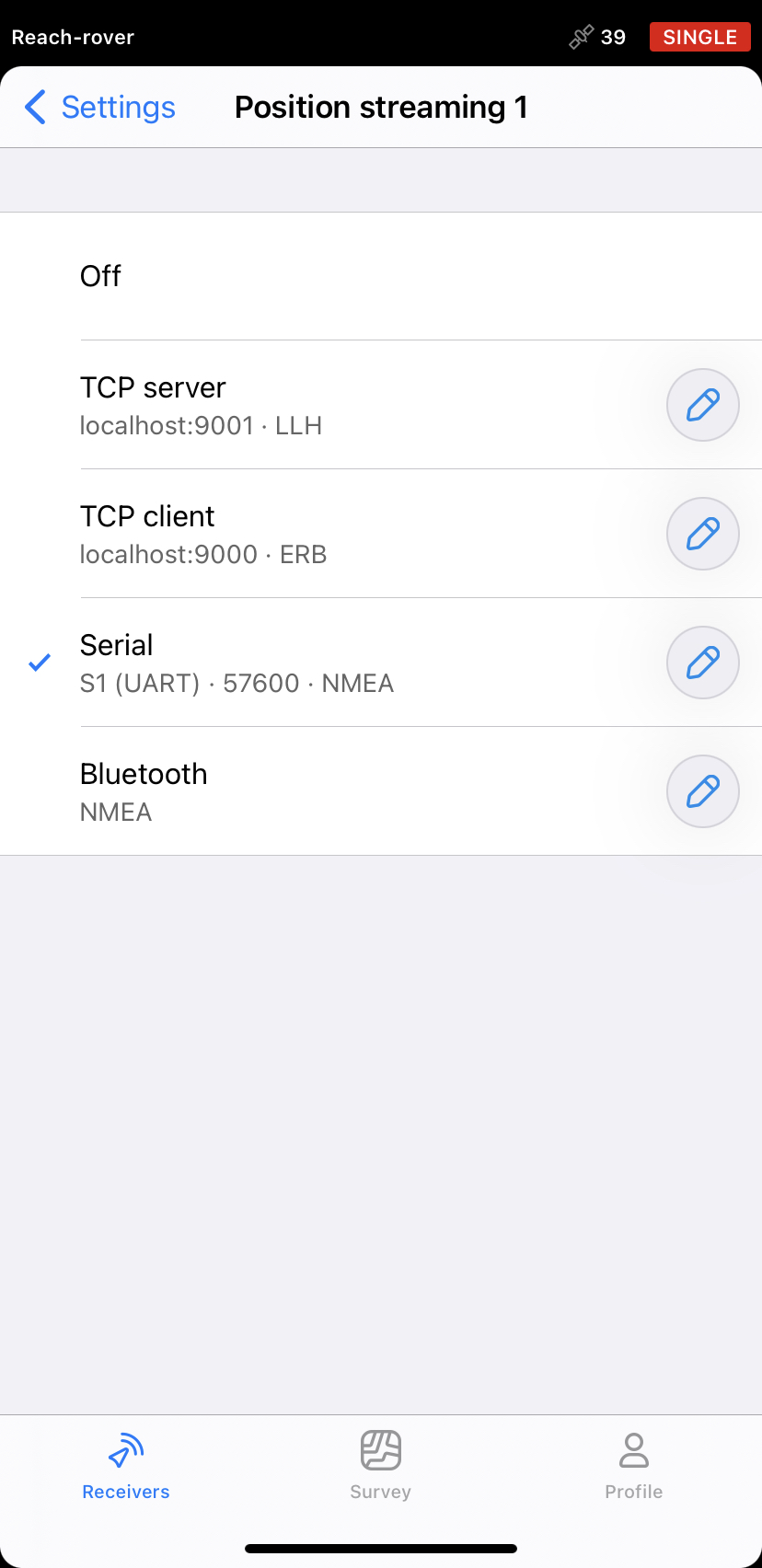
Successivamente, configurare lo streaming della posizione:
-
Tornare alla schermata Receivers (Ricevitori) e andare su Settings (Impostazioni).
-
Toccare Position streaming 1 (Trasmissione della posizione 1).
-
Selezionare Serial (Seriale).
-
Scegliere S1 (UART) o USB a PC come porta.
-
Scegliere la velocità di trasmissione desiderata (predefinita 57600).
-
Scegliere NMEA o ERB come formato di trasmissione della posizione.
-
Toccare Save (Salva) per applicare le modifiche.
Configurare un collegamento di correzione
Reach supporta diversi modi per accettare le correzioni di base, comprese le radio seriali, molto diffuse nel settore dei droni. Tuttavia, avere un collegamento radio separato solo per le correzioni di base è molto inefficiente. Per risolvere questo problema, è possibile utilizzare la radio telemetrica come vettore per le correzioni RTK. La GCS può trasmettere queste correzioni al pilota automatico con una funzione chiamata iniezione GPS. Questa funzionalità è disponibile solo in Mission Planner.
Configurare la radio per integrare le correzioni nella telemetria
Con le impostazioni predefinite, la telemetria radio non è ottimizzata per l'invio di correzioni RTK. Ciò può causare ritardi nella consegna dei dati di correzione e persino la loro perdita. Questi slittamenti peggioreranno la qualità della soluzione RTK, quindi è necessario ridurli al minimo.
La configurazione della radio viene eseguita con la telemetria disconnessa.
Per configurare una radio, procedere come segue:
Assicurarsi che la connessione MAVLink sia disabilitata prima di modificare le impostazioni della radio.
-
Fare clic su INITIAL SETUP (SETUP INIZIALE) nella barra dei menu.
-
Andare su Optional Hardware (Hardware opzionale) e selezionare Sik Radio (Radio sik) nel menu laterale.
-
Fare clic su Load Settings (Carica impostazioni) e attendere il caricamento dei parametri di entrambe le radio.
-
Deselezionare il campo ECC.
-
Scegliere RawData nel campo Mavlink.
-
Fare clic su Save Settings (Salva impostazioni).

Configurare ArduPilot per accettare la soluzione del modulo Reach
Si consiglia di utilizzare Reach solo come seconda unità GPS.
Per avviare ArduPilot su Navio2, aggiungere al comando di avvio uno dei seguenti argomenti:
-
Per la connessione UART:
-E /dev/ttyAMA0 -
Per la connessione USB:
bash -E /dev/ttyACM0
Ciò consentirà di utilizzare Reach come GPS esterno.
La configurazione di ArduPilot richiederà l'impostazione di alcuni parametri tramite Mission Planner. Dopo la connessione, procedere come segue:
-
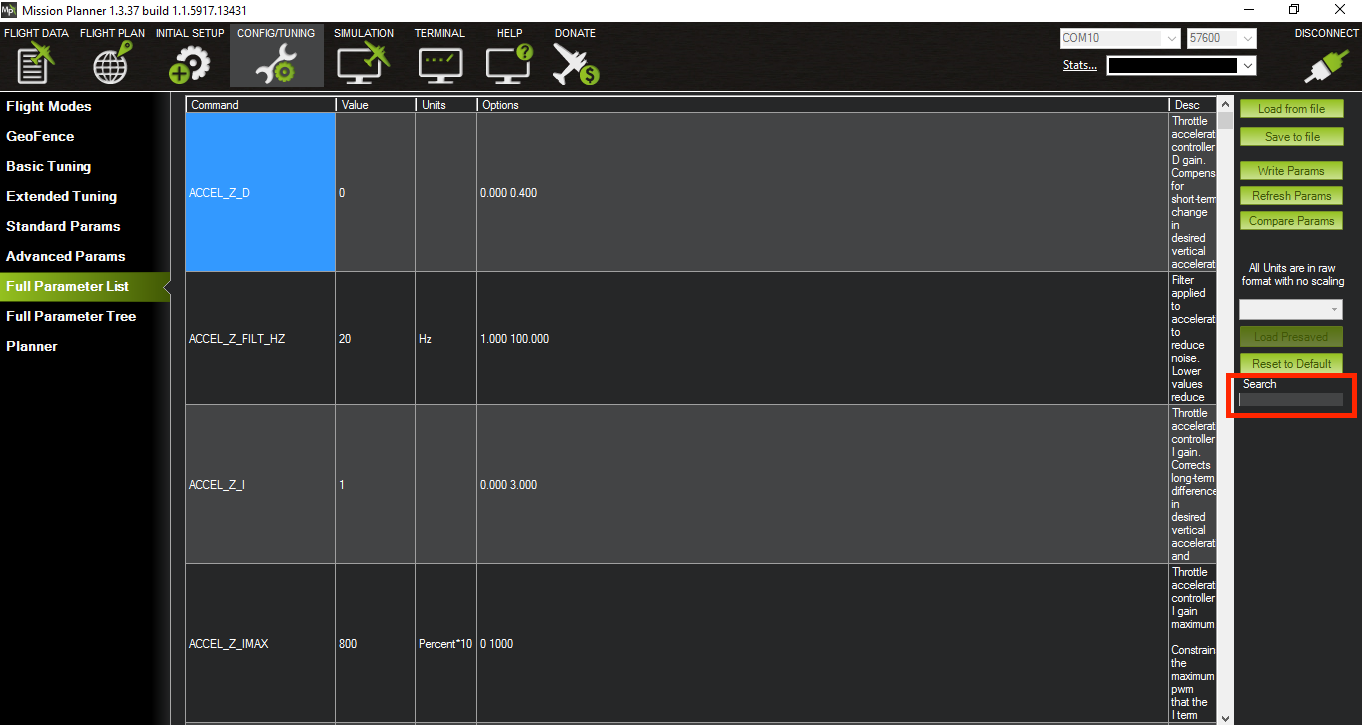
Andare al menu CONFIG (CONFIGURAZIONE).
-
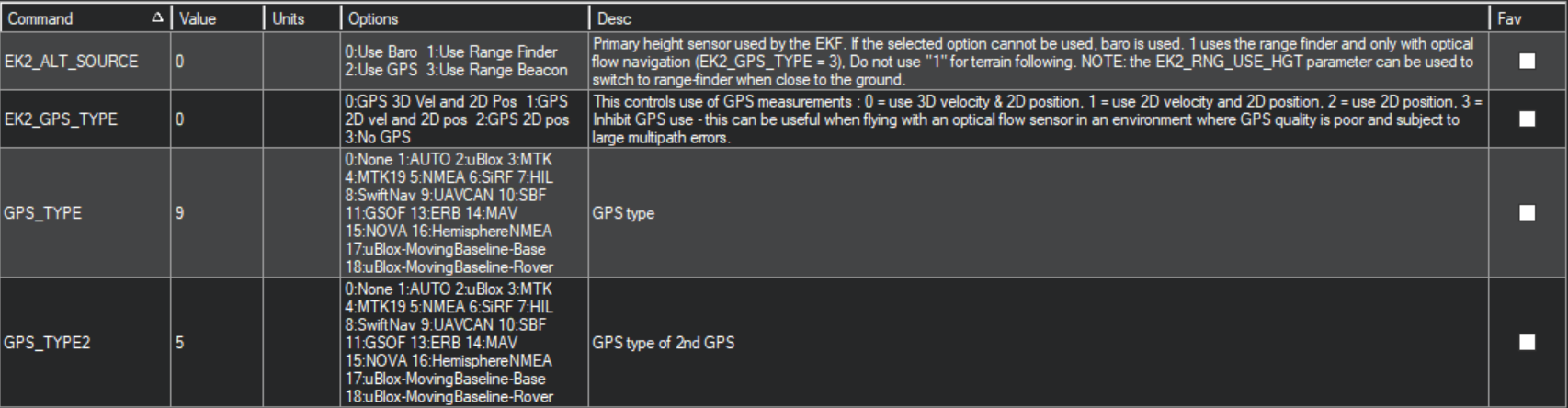
Selezionare Full Parameter List (Elenco completo dei parametri) nel menu sul lato sinistro. Per trovare rapidamente il parametro desiderato, utilizzare la casella di ricerca a destra (evidenziata in rosso).
attenzioneSe si lavora con Pixhawk, riavviarlo ogni volta che si imposta un parametro affinché la modifica abbia effetto. Scollegarlo e ricollegarlo alla porta USB.
-
Impostare il parametro GPS_TYPE2 su 5 - NMEA o 13 - ERB. Ciò abiliterà il secondo input GPS.
noteAssicurarsi di selezionare lo stesso parametro impostato in Position streaming (Trasmissione della posizione) sul proprio rover.
-
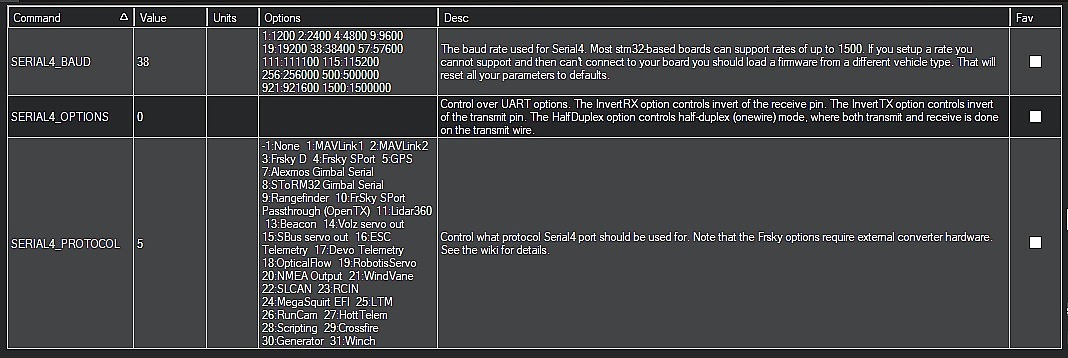
Impostare il parametro SERIAL4_BAUD sulla stessa velocità di trasmissione scelta nelle impostazioni di Position streaming (Trasmissione della posizione) di Emlid Flow. Notare le opzioni corrispondenti alle diverse velocità di trasmissione.
-
Impostare il parametro SERIAL4_PROTOCOL su 5 - GPS.
-
Impostare GPS_AUTO_SWITCH su 1 - Abilitato. Il pilota automatico passerà automaticamente da un ricevitore GPS all'altro, scegliendo quello con la soluzione migliore.

-
Impostare il parametro GPS_INJECT_TO su 1. Qui, sta per il secondo input GPS. Se si è configurato Reach come primo input, impostare questo parametro su 0.

Se Mission Planner segnala un errore di stato del segnale GPS non valido, assicurarsi che la frequenza di aggiornamento GNSS su Reach sia di 5 Hz o superiore.
Configurare la propria base
Ora è necessario configurare la base Reach per inviare le correzioni. Seguire i passaggi riportati di seguito:
-
Aprire Emlid Flow e collegarsi alla propria base.
-
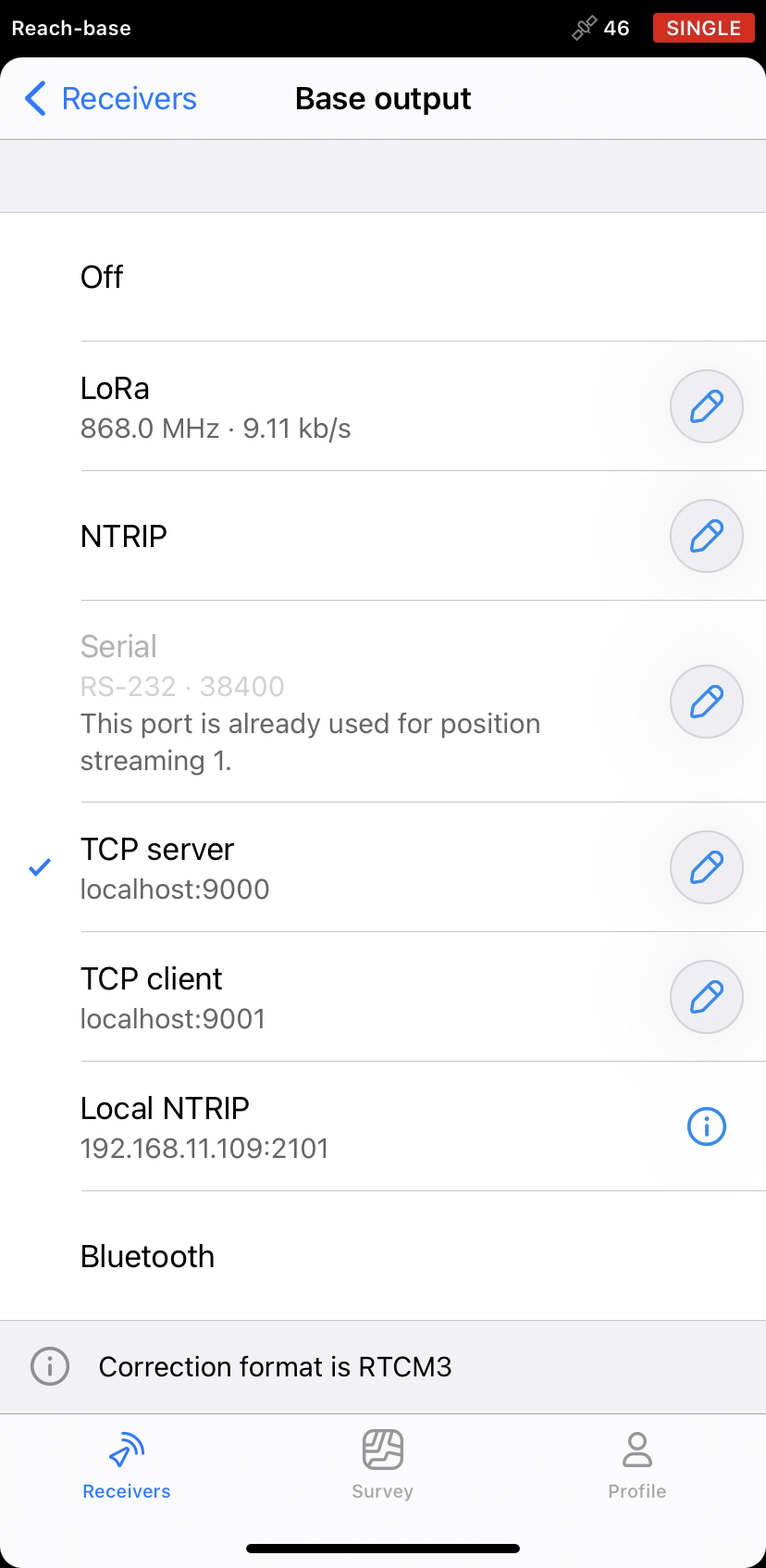
Toccare Base output (Output base).
-
Scegliere TCP server.
-
Impostare 9000 come porta.
-
Toccare il pulsante Save (Salva) per salvare le impostazioni.
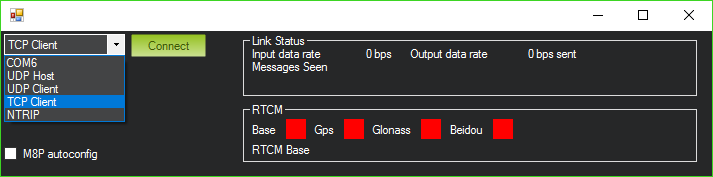
Configurare Mission Planner per iniettare le correzioni nella telemetria
Per abilitare e configurare le opzioni di iniezione GPS in Mission Planner, è necessario aprire una finestra con le impostazioni GCS avanzate. Procedere come segue:
-
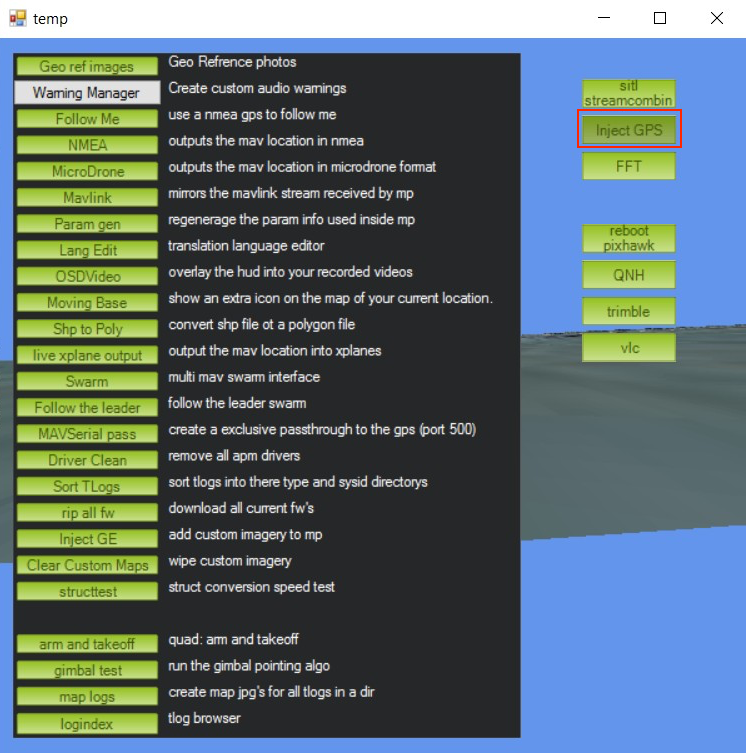
Premere la combinazione di tasti CTRL+F. Si aprirà una finestra con le impostazioni GCS avanzate.
-
Fare clic sul pulsante Inject GPS a destra.
Successivamente, nella nuova finestra, è necessario scegliere i parametri per la connessione alla base. Seguire i passaggi riportati di seguito:
-
Scegliere Client TCP e premere Connect (Connetti).
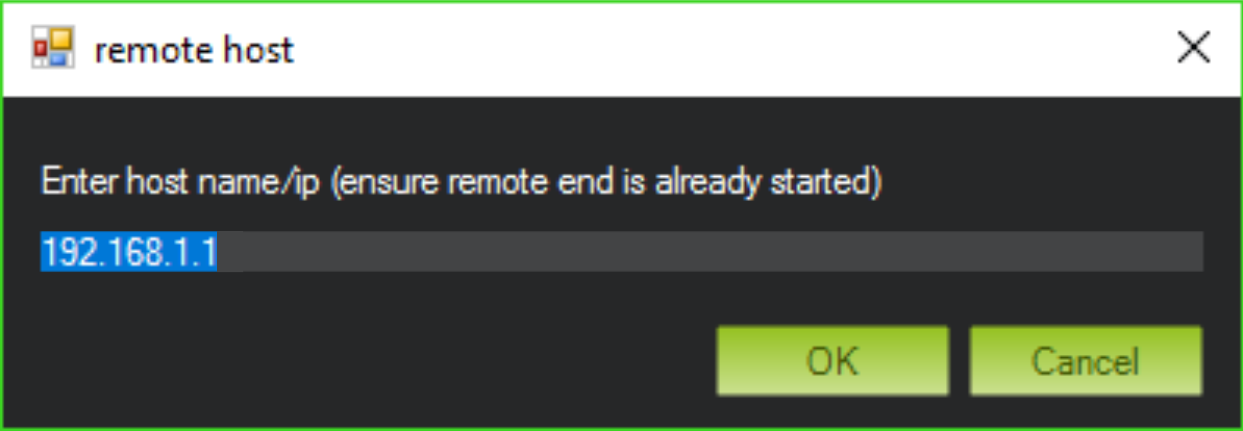
-
Inserire l'indirizzo IP della base Reach e premere OK.
-
Inserire il numero di porta del server e premere OK.
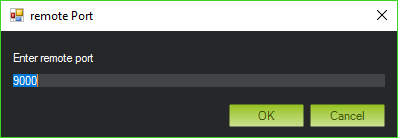
-
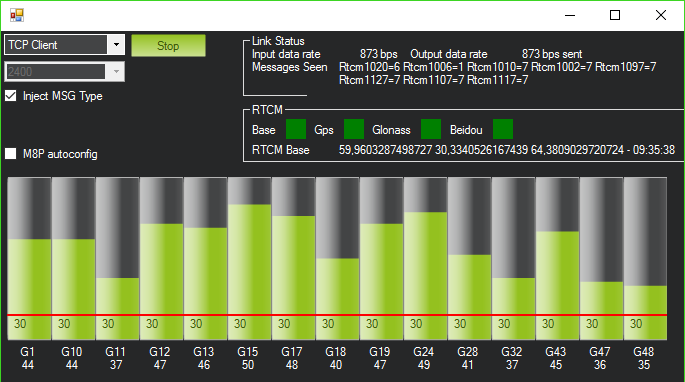
Infine, verificare che le correzioni stiano arrivando.