Configuración de la base y del rover
Introducción
Este tutorial explica cómo configurar dos dispositivos Reach M2 o Reach M+ como una base y un rover con el enlace de corrección a través de Wi-Fi.
Para configurar las correcciones de la base NTRIP, sigue los pasos de la guía Trabajar con el servicio NTRIP.
Cambiar el nombre de los dispositivos Reach
Todos los Reach tienen el mismo nombre de forma predeterminada. Para distinguir entre la base y el rover en el campo es necesario cambiarles el nombre. Siga los pasos que se indican a continuación:
- Conéctese al Reach que quiera utilizar como base.
:::consejo ¿Cómo se define Reach M2/M+?
Cuando se conectes a su Reach, todos los LED parpadearán simultáneamente. Si necesita hacer parpadear los LED durante un levantamiento, pulse la celda con el nombre de su receptor en la pantalla Receptores y acceda al botón Hacer parpadear los LED.
:::
-
Vaya a Configuración y pulse Información del receptor.
-
En Nombre del receptor y del punto de acceso, cambie el nombre de su Reach a reach-base.
El nombre que introduzca también se utilizará como etiqueta de la red Wi-Fi cuando Reach esté en modo punto de acceso.
-
Pulse Guardar.
-
Haga lo mismo con el segundo Reach. En este caso, utilice el nombre reach-rover en lugar de reach-base.
Establecer la estación base
Ahora tiene que establecer la configuración RTK en la base. Siga los pasos que se indican a continuación:
-
Conéctese a la unidad base.
-
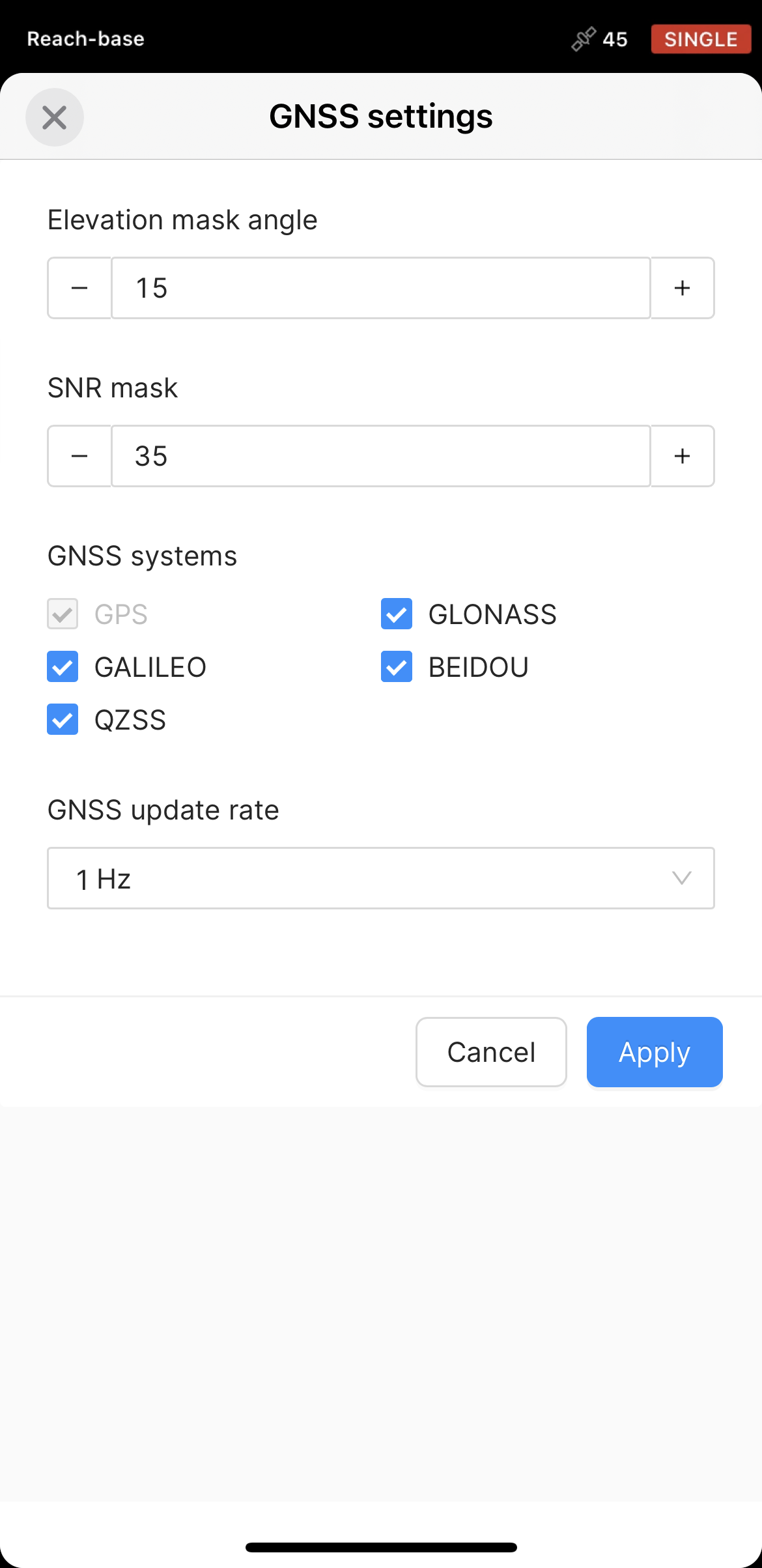
Vaya a Configuración y pulse Configuración de GNSS. Seleccione los sistemas de satélites según el dispositivo Reach que se utilice:
- Reach M2
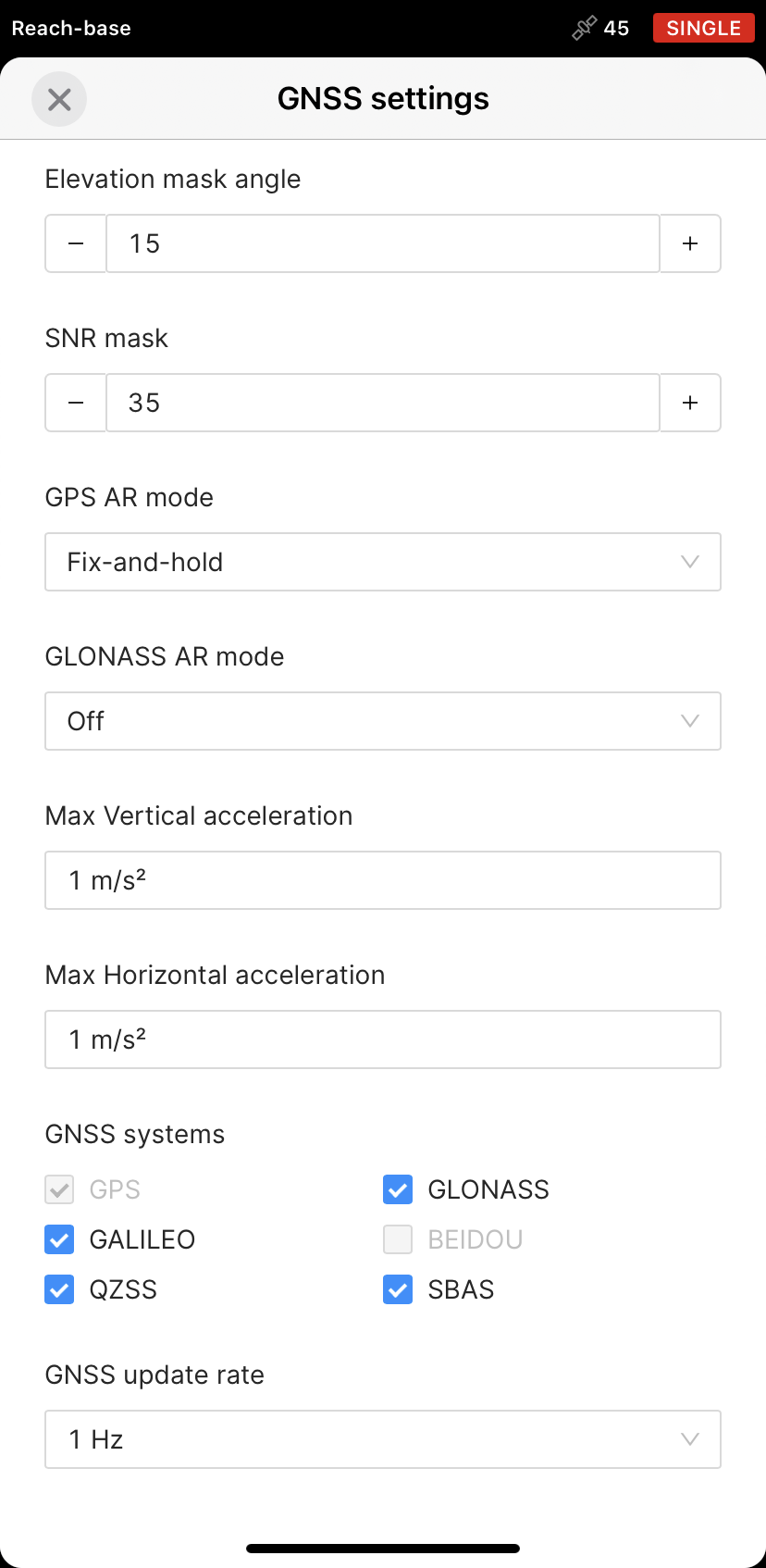
- Reach M+
Elija cada uno de los sistemas de satélites. Establezca la frecuencia de actualización GNSS en 1 Hz.
Elija GLONASS o BeiDou según su ubicación. Mientras que GLONASS cubre la mayor parte del mundo, BeiDou podría ser más eficaz en la región Asia-Pacífico. Elija el resto de los sistemas de satélites. Establezca la tasa de actualización GNSS en 1 Hz.
Tras establecer la configuración RTK, necesita configurar las correcciones de transmisión RTK mediante TCP. Siga los pasos que se indican a continuación:
-
Vuelve a la pantalla Receivers (Receptores) y pulsa Base output (Salida de la base).
-
Seleccione Servidor TCP.
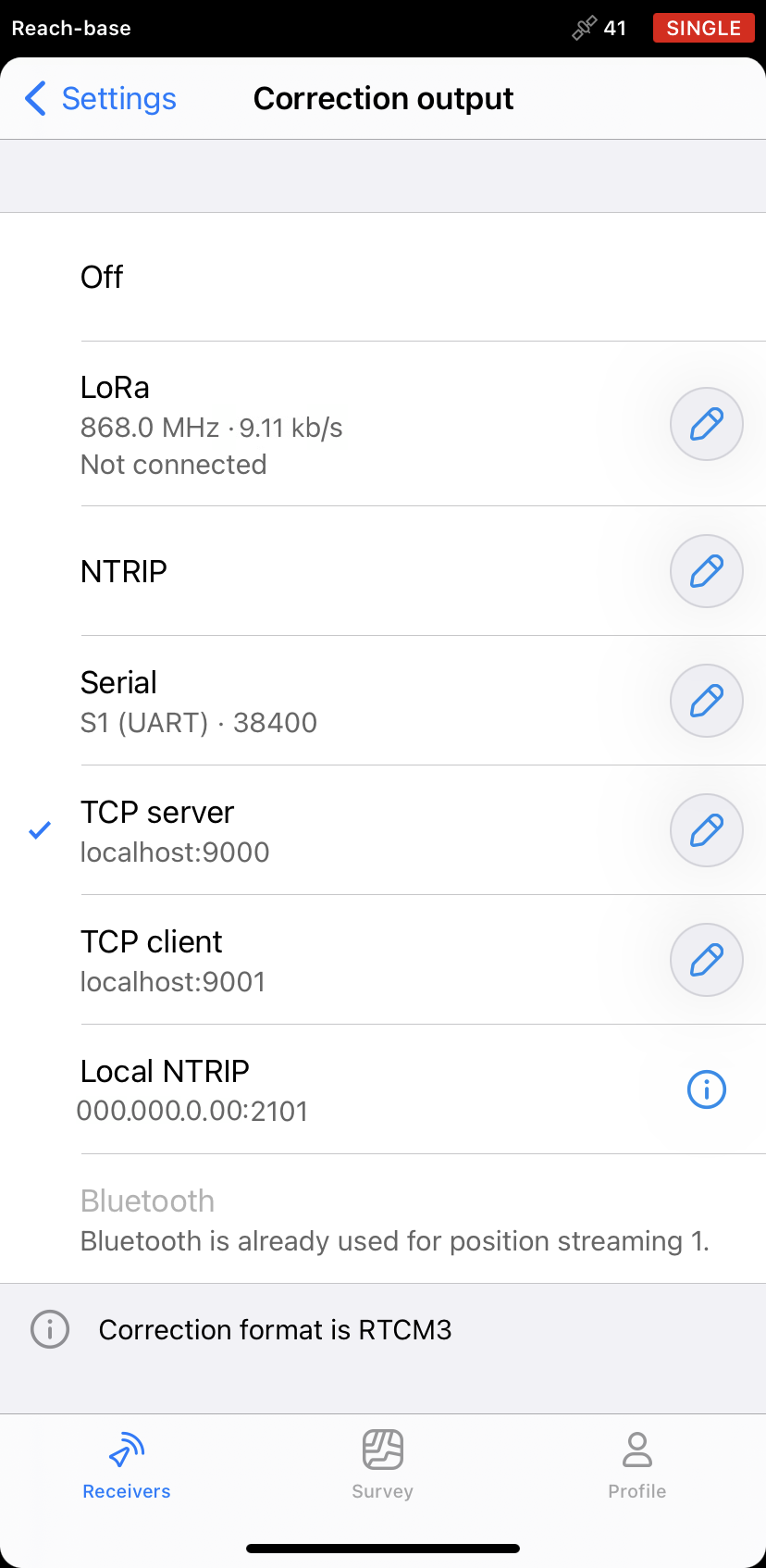
La base se configurará como localhost en el puerto TCP 9000 de forma predeterminada.
-
Ve a la pantalla Base settings (Configuración de la base) y espera hasta que la base realice un promedio de su posición.
-
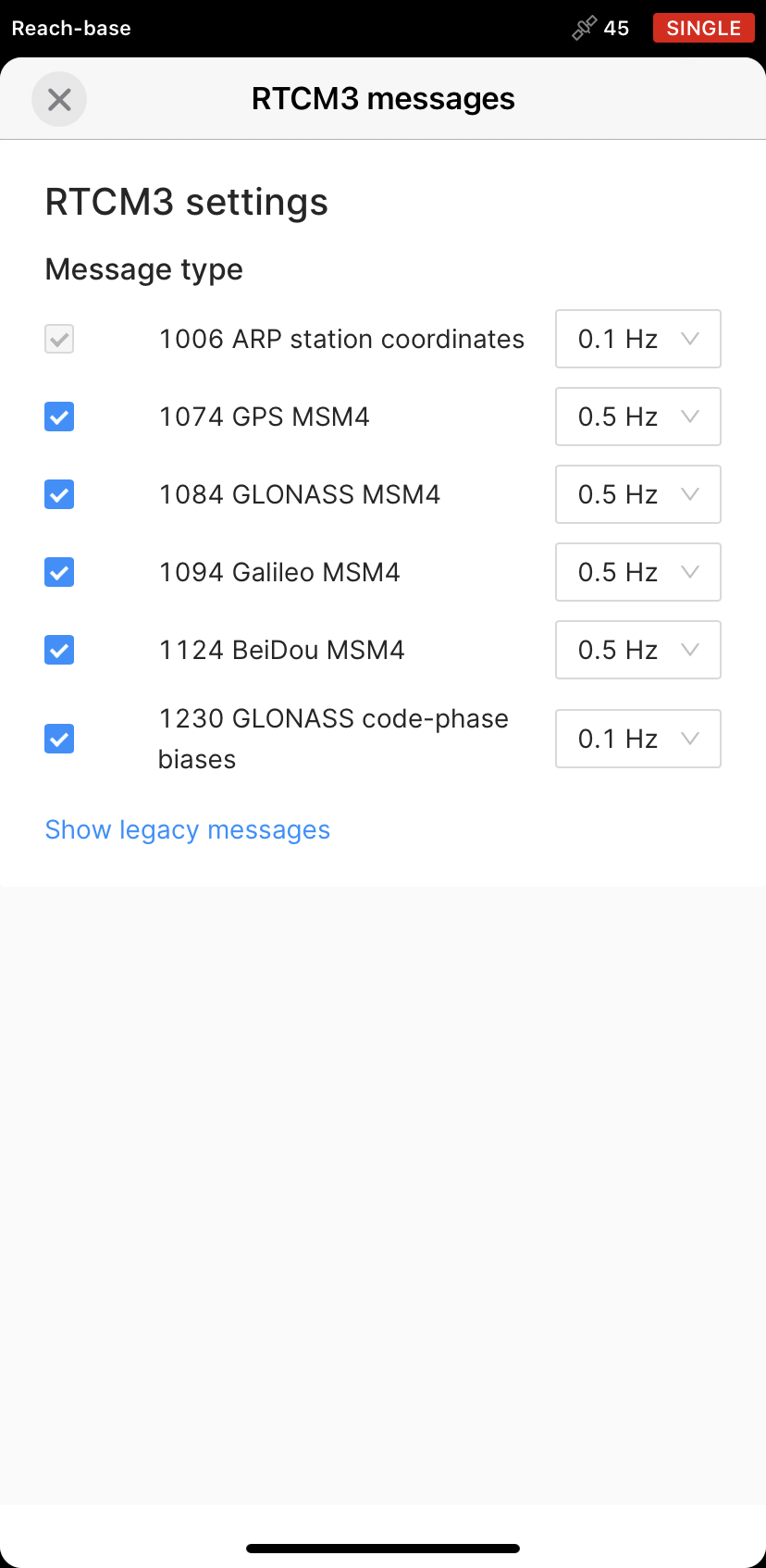
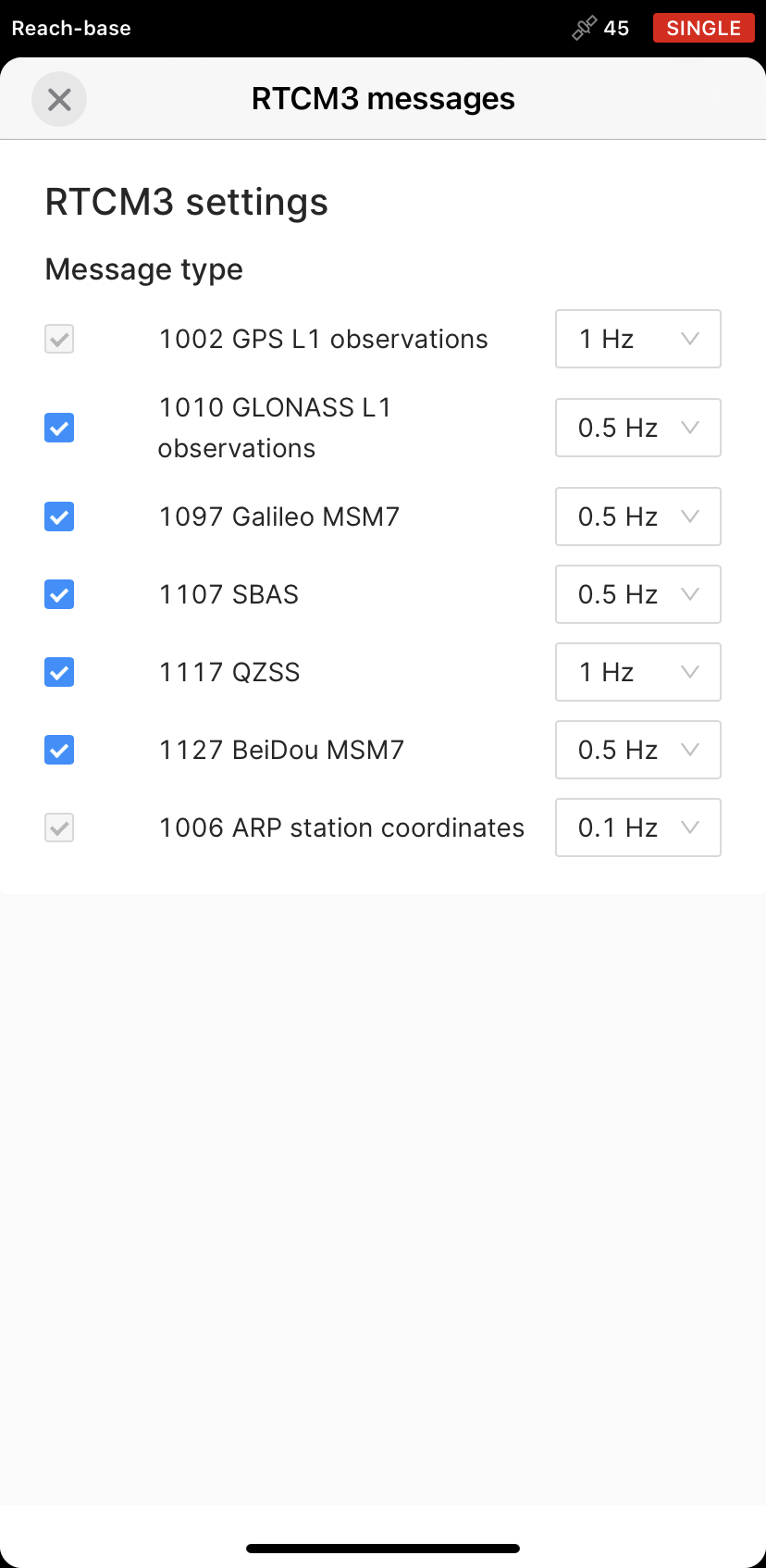
En la lista de mensajes RTCM3, seleccione la salida de los mensajes en función del dispositivo Reach en uso:
- Reach M2
- Reach M+
Seleccione esta opción para emitir coordenadas de estación ARP a 0,1 Hz, mensajes MSM4 a 1 Hz y sesgos de fase de código GLONASS a 0,1 Hz.
Seleccione para emitir observaciones GPS L1 a 1 Hz, observaciones GLONASS L1 a 0,5 Hz, Galileo MSM7 a 0,5 Hz, SBAS a 0,5 Hz, QZSS a 1 Hz, BeiDou a 0,5 Hz y coordenadas de estación ARP a 0,1 Hz.
Configure el rover
Cuando tenga lista la base, deberá configurar los ajustes RTK en el rover. Siga los pasos que se indican a continuación:
-
Conectarse a la unidad rover.
-
Vaya a Configuración y pulse Configuración de GNSS.
-
Seleccione los mismos sistemas GNSS que con la base y establezca una frecuencia de actualización GNSS de 5 Hz. Aplicar cambios.
Cuando tenga lista la base, deberá configurar los ajustes RTK en el rover. Siga los pasos que se indican a continuación:
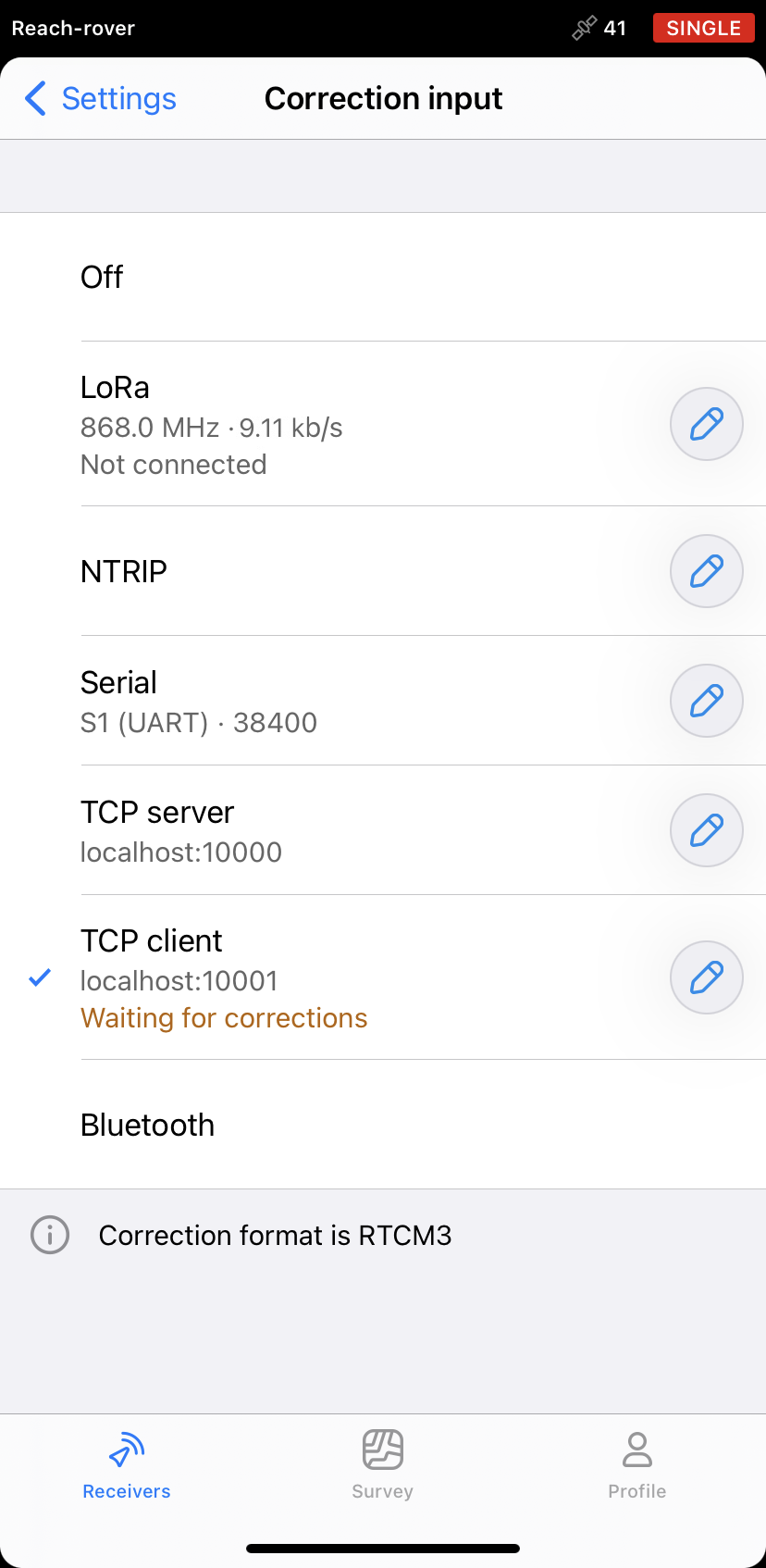
- Vuelva a la pantalla Receptores. Ve a Correction input (Entrada de correcciones) y elige TCP client (Cliente TCP).
-
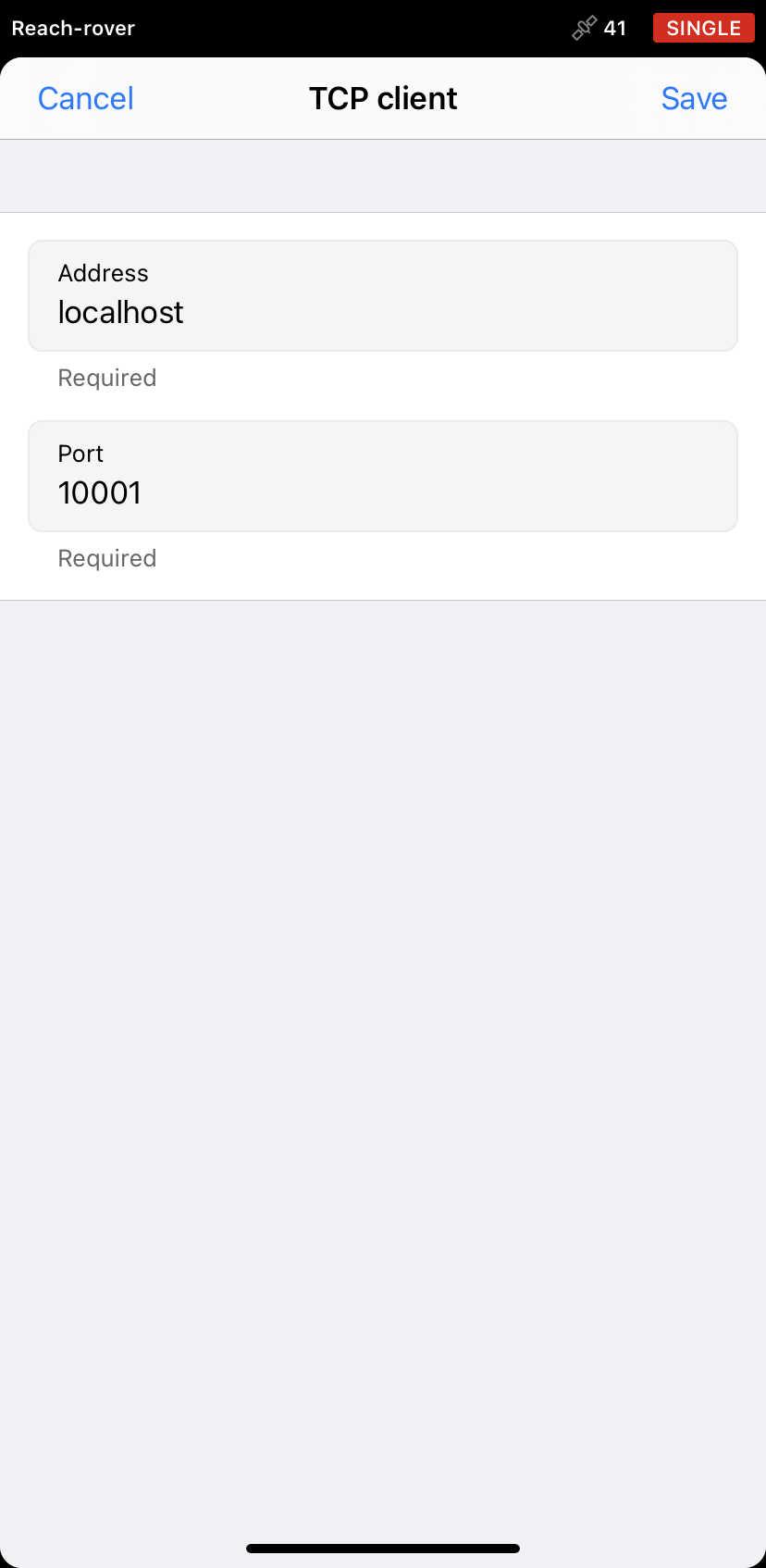
Añade la dirección IP de la base en el campo Address (Dirección).
-
Añade el puerto de corrección de base en el campo Port (Puerto).
-
Pulsa Save (Guardar) para aplicar la configuración.
-
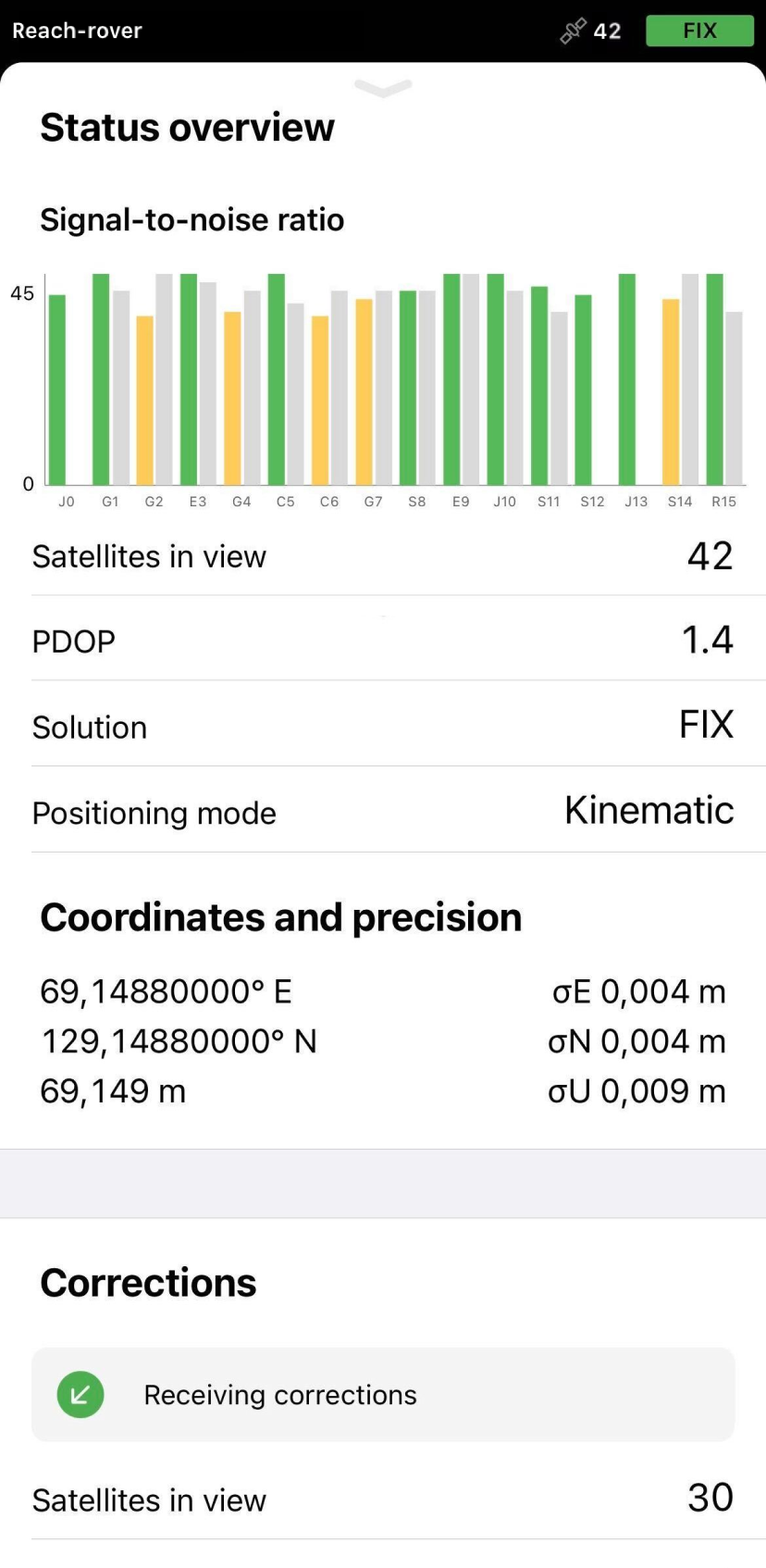
Ve a la pantalla Status (Estado). Si todo está configurado correctamente, verás la notificación Receiving corrections (Correcciones de recepción).
Ver los resultados
Puede ver el estado actual de la solución en la esquina superior derecha de la aplicación Emlid Flow:
-
SINGLE significa que el rover ha encontrado una solución basándose en su propio receptor y no se aplican correcciones de base. Para los receptores Reach, se recomienda tener una frecuencia de actualización de 1 Hz en la base y 5 Hz en el rover.
-
FLOAT significa que el rover recibe correcciones de la base, pero no puede resolver todas las ambigüedades, y en este caso, la precisión suele estar en el nivel submétrico.
-
FIX significa que el rover, utilizando las correcciones de la base, resolvió las ambigüedades en su cálculo posicional y alcanzó la solución con la precisión del nivel del centímetro.
Tras un breve periodo de tiempo, el rover obtiene una solución fija. En buenos entornos, se tardará unos minutos en obtener una solución fija. En condiciones difíciles, puede tardar un poco más. Una vez que el rover obtiene FIX, ya está todo listo para la topografía.
También puede encontrar el estado actual de la solución, así como su posición en tiempo real en la pantalla Estado.
Para obtener más información sobre la colocación de los receptores, consulta la guía Colocación de la antena.