Georreferenciamento de fotos com o Emlid Studio
Para saber mais sobre pós-processamento com nosso aplicativo de desktop multiplataforma Emlid Studio, consulte nossa documentação.
Este guia orienta-o no processo de georreferenciamento das imagens de drones no Emlid Studio, que são utilizadas para posterior mapeamento no software de fotogrametria.
Visão geral
Com a funcionalidade PPK de dados de drones, você pode facilmente adicionar geotags aos dados EXIF das imagens de drones e processá-las posteriormente no software de fotogrametria. Para realizar o georreferenciamento, são necessários os logs de dados brutos da base e do rover, ou um arquivo POS pronto com os eventos, e imagens do drone. O processo inclui duas etapas: processamento e georreferenciamento. Você pode ignorar o processamento e carregar os seus próprios arquivo _events.pos para obter fotografias com georeferenciamento.
Como começar
Para saber mais, confira o artigo Como funciona o PPK.
Como resultado da missão de mapeamento, você deve ter os seguintes arquivos:
- Log RINEX a partir de uma base
- Log RINEX de um rover
- Conjunto de imagens da câmera do drone
- Arquivo CSV do Emlid Flow com as coordenadas dos pontos de controle terrestre
Os dados RINEX serão utilizados para obter coordenadas exatas para o georreferenciamento da imagem. O arquivo CSV não é necessário nesta fase, mas é essencial para o mapeamento posterior no software de fotogrametria.
Fluxo de trabalho
Pós-processamento
Se você já pós-processou os arquivos RINEX da base e do rover e obteve o arquivo _events.pos, vá direto para a seção [Georreferenciamento] (#geotagging).
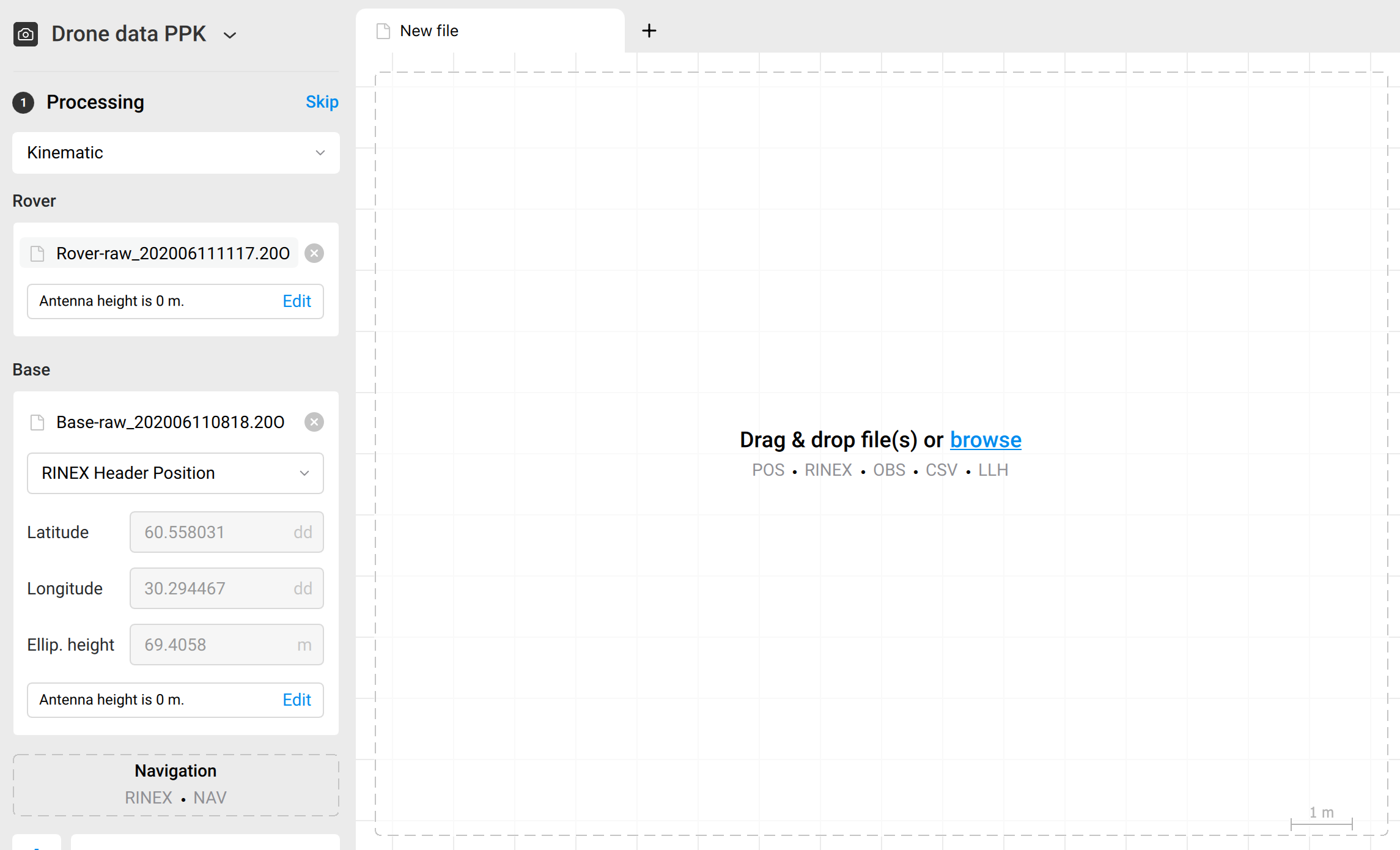
Para pós-processar os arquivos da base e do rover, siga os passos abaixo:
-
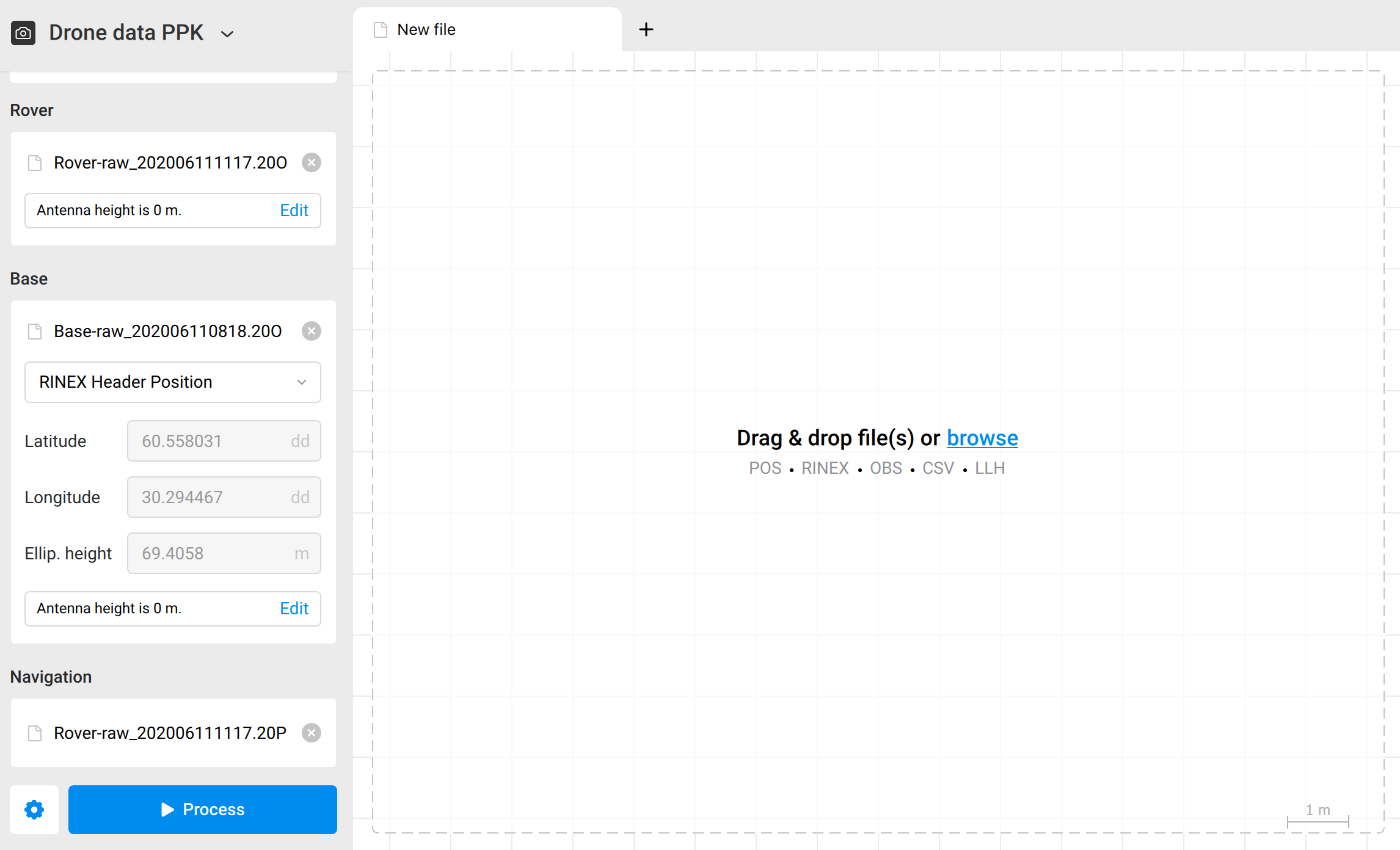
Adicione o arquivo de navegação RINEX do rover.
-
Definir a altura da antena em metros.
tipRecomendamos que deixe a altura da antena em 0. Normalmente, o software de fotogrametria tem a função de calcular o deslocamento da antena (posição central da câmera em relação à posição da antena).
-
Adicione o arquivo de navegação RINEX da base.
-
Definir as coordenadas de base.
tipPor padrão, é utilizada a posição do cabeçalho RINEX. Se você colocar a sua base sobre um ponto com coordenadas conhecidas, digite as coordenadas e a altura da antena manualmente. Desta forma, obtém-se uma exatidão absoluta.
-
Adicione o arquivo de navegação RINEX da base ou do rover.
-
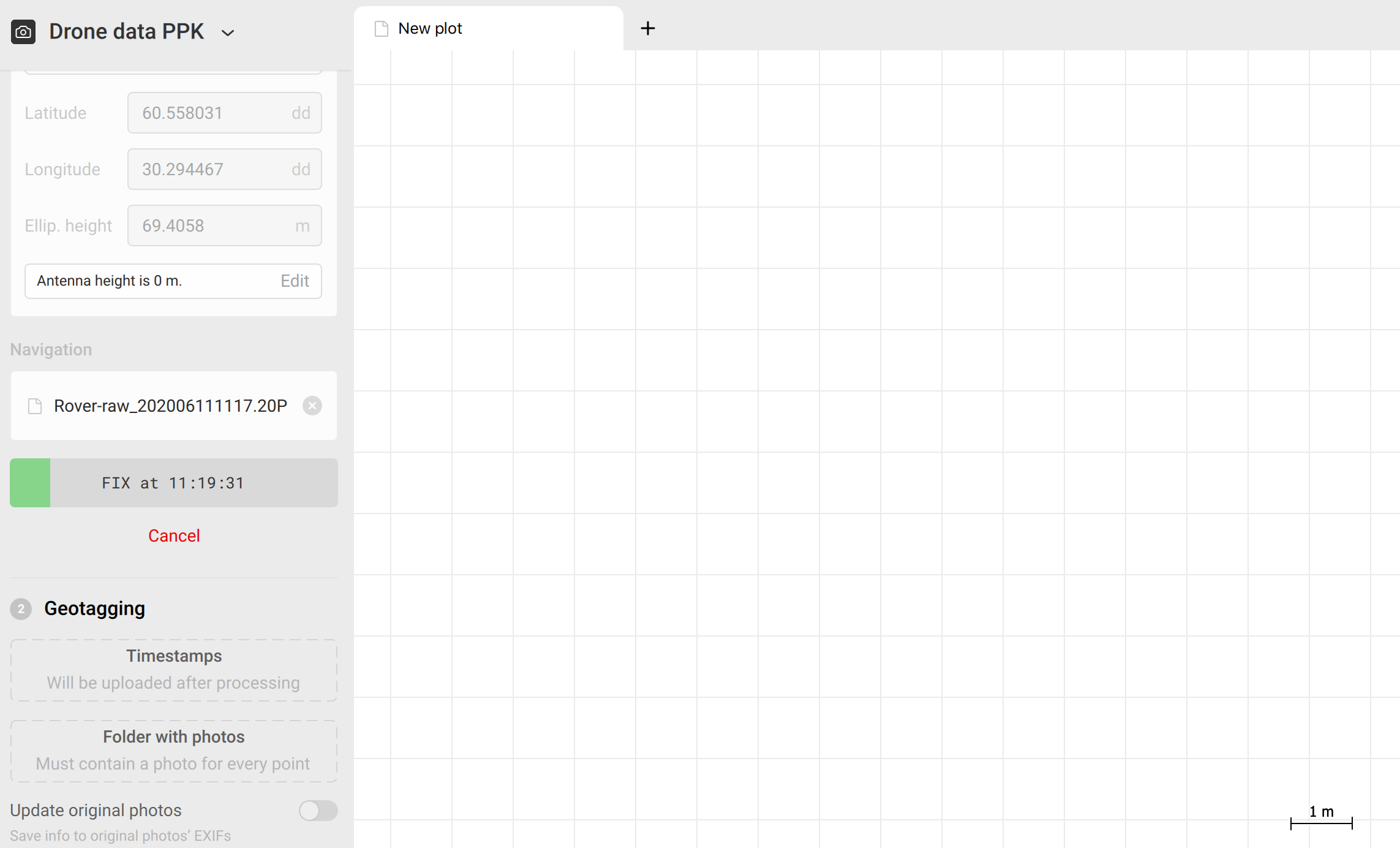
Clique em Processar. Você verá a barra de progresso no canto inferior esquerdo.
-
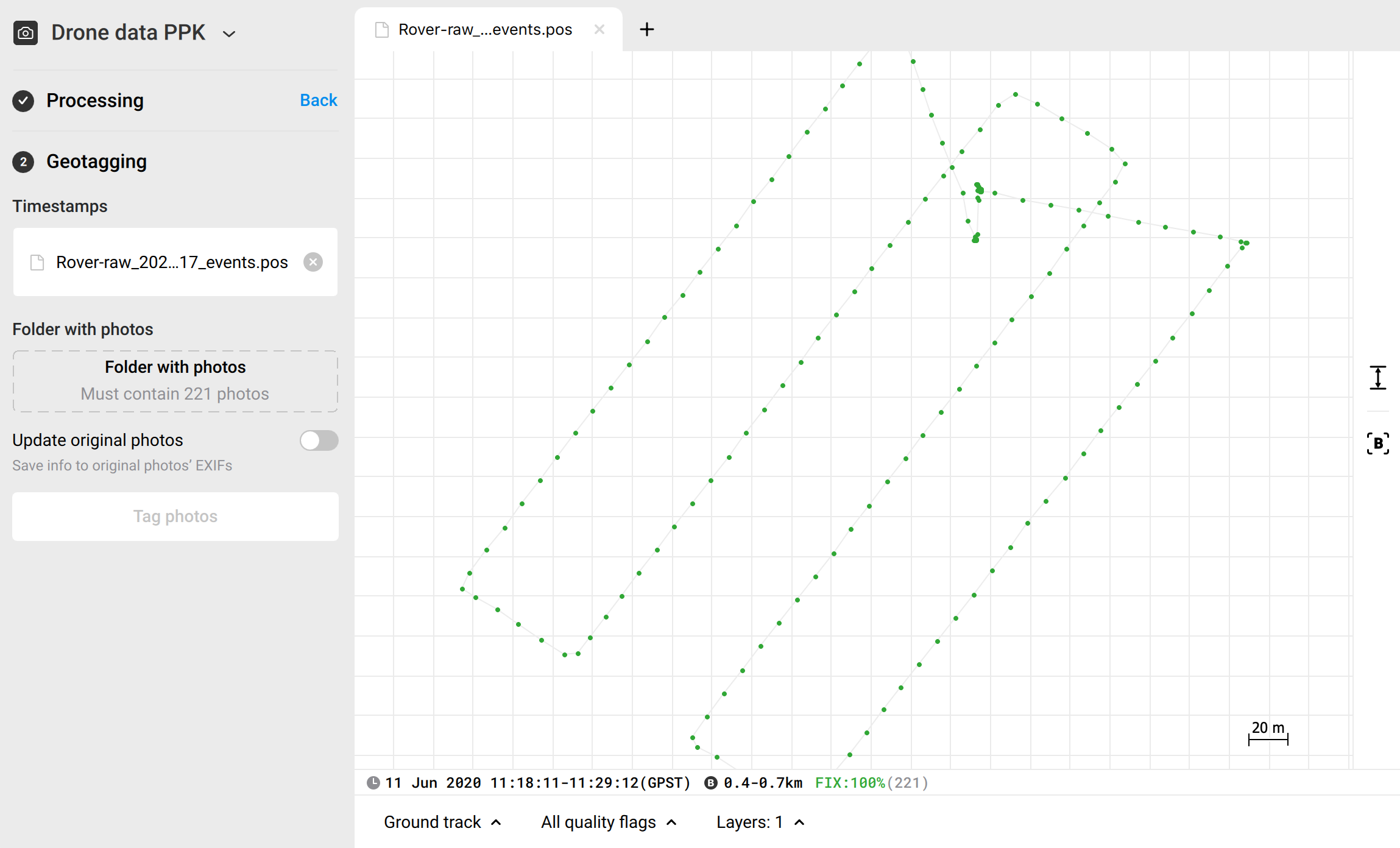
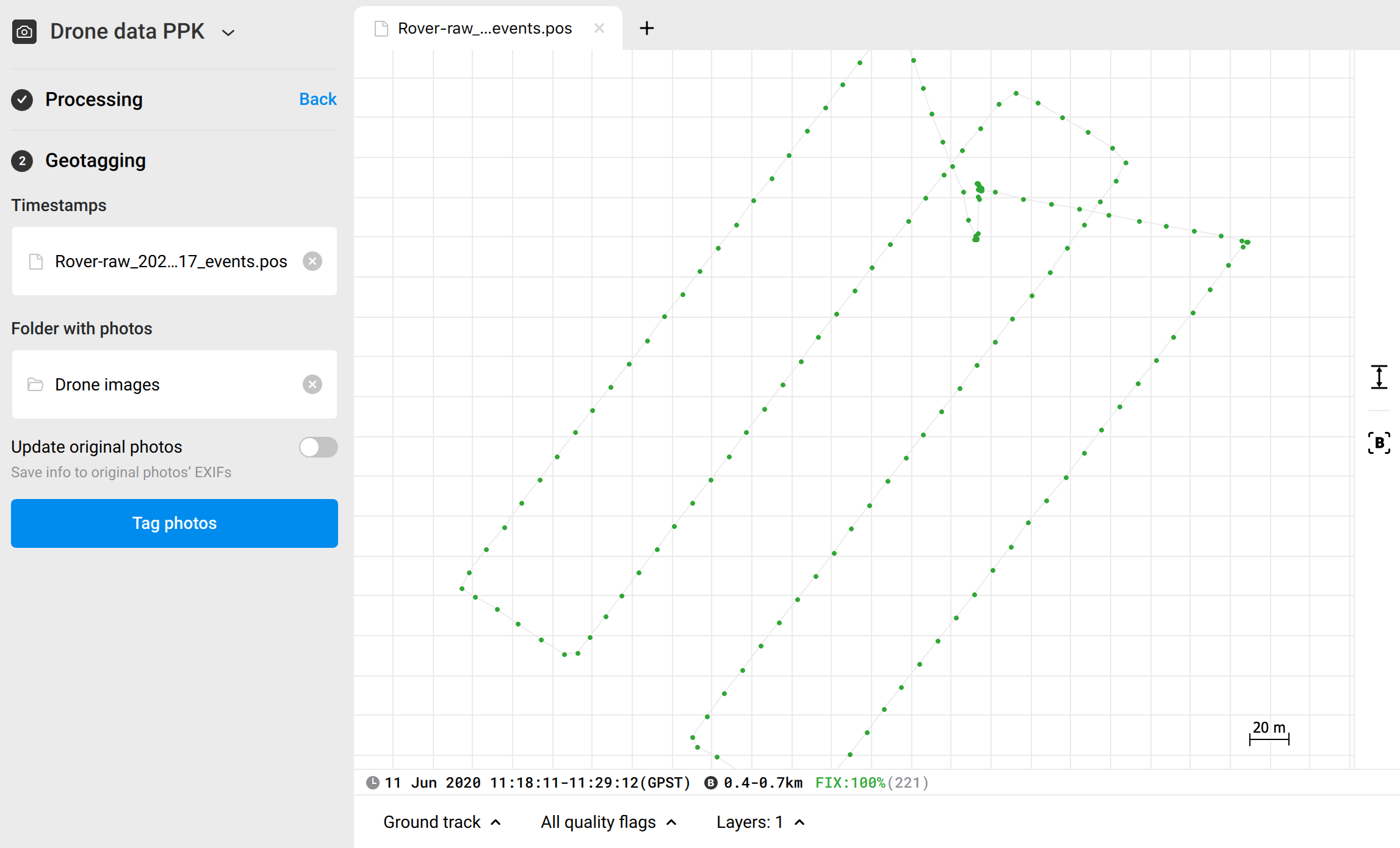
Quando o arquivo .pos estiver pronto, o Emlid Studio irá mostrá-lo no gráfico. O arquivo _events.pos com as posições precisas das fotografias será automaticamente adicionado ao campo Carimbo de data e hora (Timestamps) na seção Georreferenciamento (Geotagging).
Georreferenciamento
Se você pulou os passos acima, terá de adicionar manualmente o arquivo _events.pos. Arraste e solte-o no campo Timestamps.
Para georreferenciar suas fotografias, siga os passos abaixo:
-
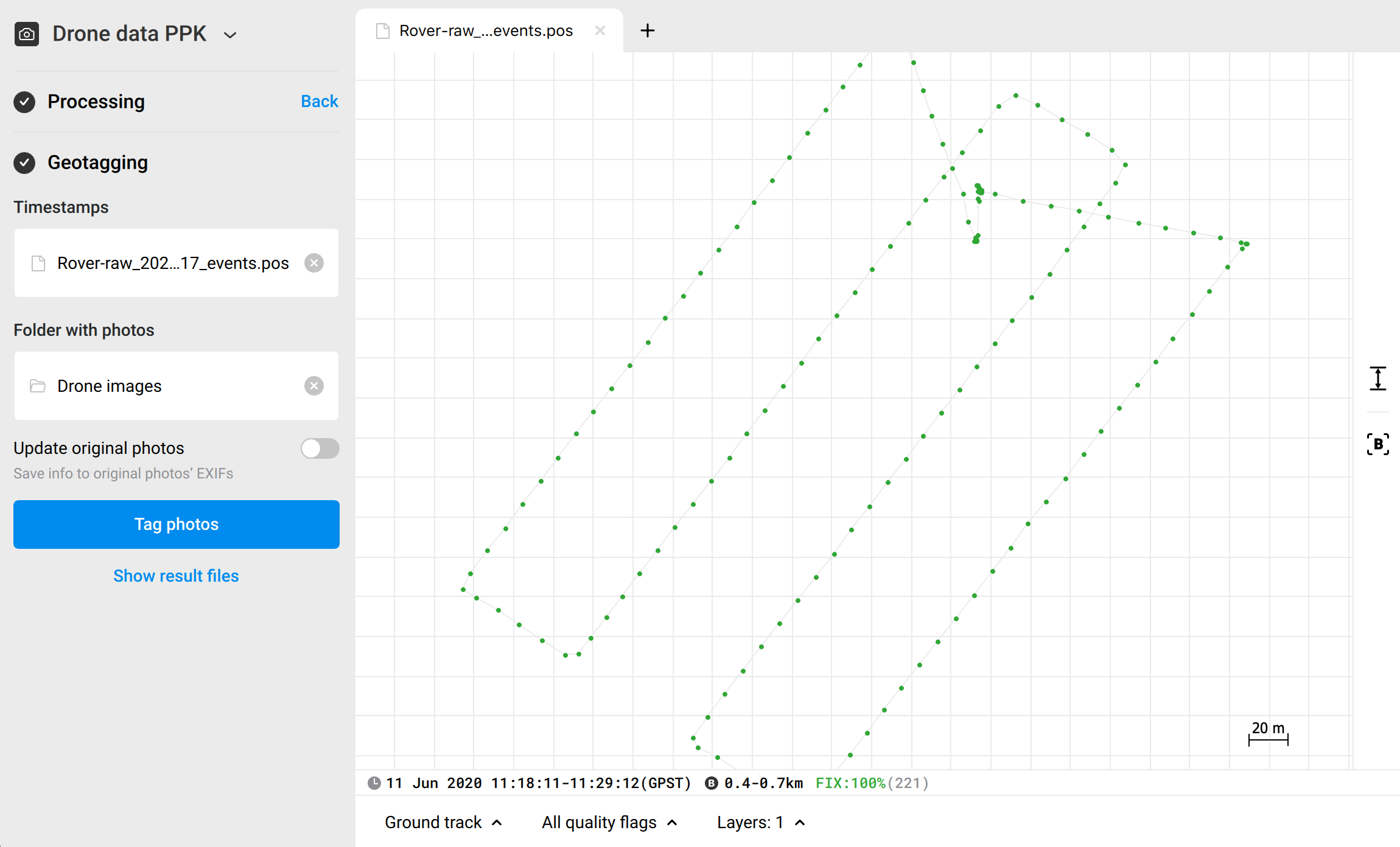
Selecione a pasta que contém as fotografias da câmera do drone.
noteO Emlid Studio só pode georeferenciar fotografias quando o número de timestamps for igual ao número de fotografias.
tipSe você quiser atualizar as fotos originais com geotags, ative Atualizar fotos originais. Por padrão, o Emlid Studio cria cópias das fotografias com geotags numa nova pasta.
-
Clique no botão Etiquetar fotos. O processo de georreferenciamento será iniciado. Quando o processamento terminar, você poderá clicar em Mostrar arquivos de resultados para ver as fotos georeferenciadas.
Assim que tiver marcado as fotografias com georeferenciamento, você pode proceder com a criação de um mapa no software de fotogrametria.
Para criar um mapa usando o Pix4DMapper, consulte o tutorial Criando o mapa com o Pix4DMapper.