Glosario
Distancia de cuadrícula 2D
La distancia de cuadrícula 2D entre los puntos A y B es la longitud de la recta AB en un plano liso.
Distancia al suelo 2D
La distancia al suelo 2D entre los puntos A y B es la longitud de la línea AB más corta en la superficie del elipsoide.
Perímetro 2D
El perímetro 2D de un objeto cerrado es la suma de las distancias 2D de sus lados sin tener en cuenta la diferencia de altura.
Posicionamiento absoluto
El posicionamiento absoluto muestra tus coordenadas globales reales en relación con la superficie de la Tierra. El posicionamiento absoluto es clave para los levantamientos RTK en los que se necesita una precisión geográfica absoluta (por ejemplo, cartografía, estudio de los límites de la propiedad, etc). En este caso, la posición absoluta de tu base es crucial para obtener resultados de alta precisión.
Exactitud
La exactitud es la proximidad de las mediciones a un valor específico. En topografía, la exactitud indica si las coordenadas obtenidas son correctas en relación con las coordenadas globales. No confundir con Precision.
Edad del diferencial
La edad del diferencial es la medida de la antigüedad de las correcciones que recibe tu receptor. Se calcula restando la hora a la que se ha generado el mensaje de corrección de la hora actual del receptor. La edad estándar del diferencial para el RTK es normalmente de 1-2 segundos.
Centro de fase de la antena
El centro de fase de la antena podría denominarse como la fuente de radiación de la antena. Todas las mediciones del GNSS se refieren al centro de fase. El centro de fase no se corresponde con el centro físico de la antena y su posición real depende de la dirección de la señal de radio entrante. Además, cada banda tiene su propio centro de fase respectivo.
Punto de referencia de la antena
El punto de referencia de la antena es el punto central situado en la parte inferior del receptor. Se utiliza para calcular la altura de la antena.
Área
El área de un objeto es la cantidad total de espacio contenido por su forma en una superficie plana.
Ratio AR
Este es el resultado de la prueba de ratio realizada sobre la posible solución "Fix", muestra cuántas veces la mejor solución es mejor que la siguiente. Si este número es superior a 3, Reach considerará fija la solución RTK.
Este parámetro corresponde únicamente a los dispositivos Reach monobanda (Reach RS/RS+, Módulo Reach/M+).
Base
La base es uno de los receptores que actúan como estación de referencia en escenarios RTK o PPK. Es una unidad estática con las coordenadas determinadas que envía correcciones a la unidad móvil o rover. Si la base se fija sobre el punto conocido, proporciona una exactitud absoluta.
Registro de correcciones de la base
Este registro contiene las correcciones de la estación base en formato RTCM3.
Línea base
La línea base es la distancia entre un rover y una base. Si la línea base es mayor que la recomendada, la solución será menos exacta, el tiempo para alcanzar la solución Fix será mayor o no se calculará en absoluto.
BeiDou
BeiDou es un sistema de navegación chino. En el año 2000, BeiDou-1 solo cubría China. Posteriormente, en 2012, BeiDou-2 comenzó a cubrir la región de Asia-Pacífico. Desde 2015, BeiDou ofrece una cobertura global.
Modo cliente
BeiDou es un sistema de navegación chino. En el año 2000, BeiDou-1 solo cubría China. Posteriormente, en 2012, BeiDou-2 comenzó a cubrir la región de Asia-Pacífico. Desde 2015, BeiDou ofrece una cobertura global. Le recomendamos que utilice este sistema si se encuentra en la región de Asia-Pacífico.
Continuo
El continuo es una estrategia para resolver las ambigüedades del RTK y el PPK. En este caso, las ambigüedades se resuelven punto por punto.
Sistema de coordenadas
El modo cliente significa que Reach se conecta a una red Wi-Fi externa.
Entrada de correcciones
Es la parte de los ajustes del rover que se encarga de configurar la recepción de las correcciones. Mediante la configuración de la entrada de correcciones en la aplicación ReachView 3, puedes elegir el modo en que tu rover recibe las correcciones: vía Serie, TCP, NTRIP, Bluetooth o LoRa. Menos estable que Fix-and-Hold, pero sin riesgo de mantener una falsa fijación.
Correcciones
Las correcciones son los datos que se utilizan para eliminar los retardos ionosféricos y troposféricos y los errores del reloj del satélite. La base estática transmite correcciones al rover en movimiento en el escenario RTK.
CORS
Es la parte de los ajustes del rover que se encarga de configurar la recepción de las correcciones. Mediante la configuración de la entrada de correcciones en la aplicación Emlid Flow, puede elegir el modo en el que su rover recibe las correcciones: a través de Serie, TCP, NTRIP, Bluetooth o LoRa. Los receptores Reach admiten la entrada de correcciones en formato RTCM3.
Dilución de precisión o DOP
La Dilución de precisión o DOP es el término utilizado para evaluar la posición geométrica de los satélites con respecto al receptor. Cuando los satélites están demasiado cerca unos de otros en el campo de visión, significa que la geometría de los satélites es débil (un valor de DOP alto).
Máscara de elevación
La máscara de elevación se puede configurar en los ajustes de RTK de la aplicación ReachView 3. Los satélites que se encuentren por debajo de la elevación establecida se excluyen del cálculo.
Delta E/N
Delta E/N entre los puntos A y B es la diferencia de sus coordenadas a lo largo de los ejes Este y Norte correspondientes.
ENU
Uno de los formatos de salida de posición disponibles para los dispositivos Reach. Protocolo de texto simple para los componentes Este, Norte y ARRIBA de la línea base, así como el estado de la solución. Si la distancia entre los satélites es suficiente y se reparten uniformemente y cubren más espacio, la geometría se considera fuerte, por lo que el valor de DOP es bajo. Cuanto más bajo sea el DOP, más exactos serán sus datos. Se considera que un buen valor de DOP es inferior a 2.
Dirección (acimut)
La dirección (acimut) de una línea AB, o del punto A al B, es un ángulo horizontal en grados, medido en el punto A en el sentido de las agujas del reloj entre la dirección hacia el norte y la dirección hacia el punto B.
ERB
Uno de los formatos de salida de posición disponibles para los dispositivos Reach. Se utiliza para la comunicación con ArduPilot.
Fix-and-Hold
La máscara de elevación puede establecerse en la configuración RTK de la aplicación EmlidFlow. Después de la primera ambigüedad, el estado fix los mantiene limitados. El estado fix es más estable, pero en caso de que la primera inicialización no fuera correcta, tardará más en recuperarse e inicializarse correctamente. Normalmente, los satélites con menor elevación proporcionan mediciones con demasiado ruido, ya que la señal atraviesa la mayor parte de la atmósfera.
Informe de sistema completo
Un informe de sistema completo es una herramienta que se utiliza para facilitar la elaboración de informes de incidencias. Viene en un archivo ZIP y contiene registros del sistema y detalles técnicos de tu dispositivo, así como alguna información privada como tus credenciales NTRIP o contraseñas de red.
Galileo
Galileo es un sistema europeo de navegación por satélite. Comenzó a operar en 2011 y ahora tiene cobertura mundial.
Punto de control en tierra o GCP
Galileo es un sistema europeo de navegación por satélite. Los GCP se utilizan activamente en la cartografía aérea y la fotogrametría. ERB son las siglas del protocolo Emlid Reach Binary.
GIS
El conector inferior externo es un conector de 9 pines situado en la parte inferior de Reach RS/RS+, RS2/RS2+ y RS3. Se utiliza para suministrar alimentación constante desde una batería externa, establecer comunicación RTK con dispositivos de terceros y transmitir la posición de Reach a otros dispositivos o aplicaciones de terceros. Utiliza el protocolo de comunicación serial RS-232.
GLONASS
Fix-and-Hold es una estrategia para resolver las ambigüedades del RTK y el PPK. Después de la primera ambigüedad, el estado fix los mantiene limitados. El estado fix es más estable, pero en caso de que la primera inicialización no fuera correcta, tardará más en recuperarse e inicializarse correctamente. Puede pensar en ello como si el estado Fix tuviera inercia.
Modo GLONASS AR
Un parámetro de procesamiento que permite activar y desactivar la resolución de ambigüedades para la señal GLONASS de manera independiente. A diferencia del GPS, todos los satélites GLONASS transmiten en frecuencias diferentes, lo que da lugar a sesgos entre canales (ICB) que son únicos para cada modelo de receptor. Por eso no recomendamos compartir el informe públicamente. El equipo de asistencia los utiliza para depurar casos complicados.
GNSS
Los dispositivos Reach pueden corregir los ICB del GLONASS, lo que permite utilizar GLONASS AR con bases que no sean de Reach, como los casters NTRIP. La recomendación general es tener siempre el GLONASS AR activado.
Dato global
El datum global es un sistema de referencia de coordenadas elipsoidales que utiliza el receptor para medir las coordenadas antes de aplicar cualquier transformación.
Grado
El grado de una línea es la medida de su inclinación, con valores mayores para pendientes más pronunciadas y 0 % para una línea horizontal.
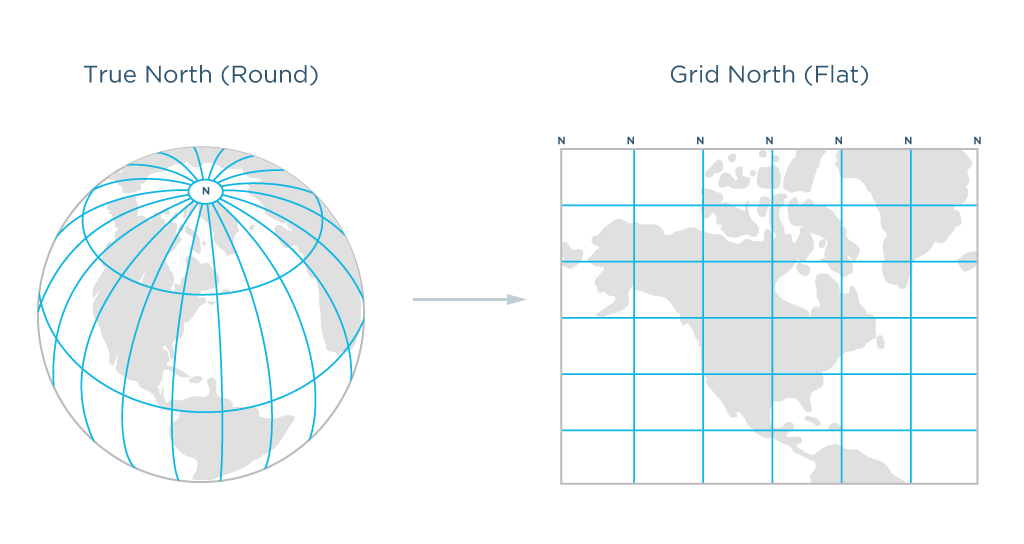
Acimut norte de cuadrícula
El acimut norte de cuadrícula es el ángulo medido en el sentido de las agujas del reloj entre una línea paralela al meridiano central y la dirección hacia un punto de interés (una línea recta entre dos puntos del plano de proyección).
Distancia de cuadrícula
La distancia de cuadrícula es la distancia medida en el plano de proyección.
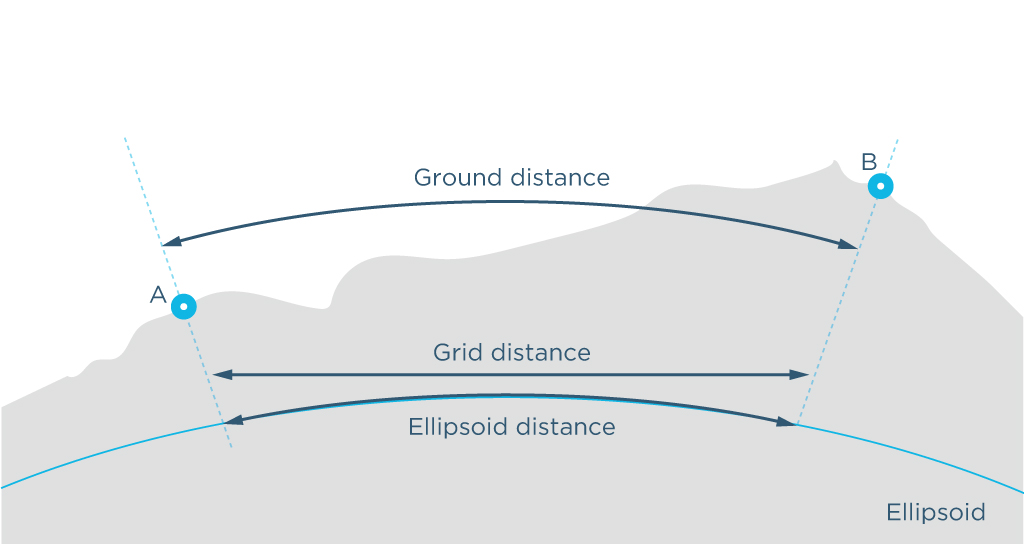
Distancia al suelo
La distancia al suelo es la distancia medida sobre la superficie real de la Tierra, teniendo en cuenta la elevación media de los puntos medidos.
GPS
El punto de control en tierra es un punto de una superficie con coordenadas conocidas. Los GCP se utilizan activamente en la cartografía aérea y la fotogrametría. Los topógrafos establecen los GCP sobre el área y los marcan para que sean visibles desde el dron. A continuación, los GCP se levantan para encontrar sus coordenadas exactas y se utilizan como puntos de referencia para el futuro procesamiento de datos.
Plano de tierra
El Sistema de información geográfica o GIS es un sistema para recopilar, almacenar, analizar y visualizar gráficamente datos espaciales e información relacionada con los objetos requeridos.
Adaptador de zapata
El Sistema de posicionamiento global o GPS es un sistema global de navegación por satélite que mide la distancia, el tiempo y la ubicación en el sistema mundial de coordenadas WGS 84. El sistema se desarrolló en 1978 y es operado por Estados Unidos.
Modo de punto de acceso
Un plano de tierra es una placa conductora que proporciona aislamiento a la antena. Puede ser un trozo de metal, el techo de un coche, el techo metálico de un edificio, etc.
La zapata es un punto en la parte superior de una cámara que se utiliza para acoplar accesorios u otros equipos a la cámara. Mediante un adaptador de zapata, puedes conectar tu cámara al Reach M+/M2 para la topografía UAV.
Este parámetro corresponde únicamente a los dispositivos Reach monobanda (Reach RS/RS+, M�ódulo Reach/M+).
Posicionamiento cinemático
El Sistema global de navegación por satélite o GNSS es un sistema diseñado para determinar la ubicación (coordenadas geográficas) de objetos terrestres, acuáticos y aéreos. Estos sistemas constan de equipos espaciales, un segmento terrestre denominado sistemas de control y receptores individuales. El funcionamiento del GNSS se basa en la medición de la distancia entre la antena del objeto (receptor) y los satélites cuya posición se conoce con gran exactitud.
LLH
Uno de los formatos de salida de posición disponibles para los dispositivos Reach. Protocolo de texto simple para la latitud, la longitud y la altura, así como el estado de la solución.
Radio LoRa
La radio de largo alcance o LoRa se utiliza para que los receptores Reach envíen o reciban correcciones sin conexión a Internet. El Reach RS+/RS2 está equipado con radio LoRa interna. Se recomienda utilizar un plano de tierra de al menos 70 × 70 mm.
Ubicación falsa
La función de ubicación falsa de los dispositivos Android te permite cambiar manualmente la ubicación de tu dispositivo a cualquier otro lugar. En el caso de los dispositivos Reach, permite que las aplicaciones de recolección de GPS obtengan las observaciones del GPS directamente del receptor en lugar del GPS interno de la unidad.
Punto de montaje
El modo de punto de acceso significa que el Reach emite su propia red Wi-Fi.
Receptor multibanda
Un receptor multibanda es un receptor que puede aceptar señales del satélite en más de una banda de frecuencia. Esto significa que el receptor tarda menos tiempo en establecer el primer estado fix, tiene una línea base más larga y tiene más posibilidades de mantener el estado fix en condiciones de visibilidad limitada del cielo.
Multitrayectoria
Galileo es un sistema europeo de navegación por satélite. El efecto multitrayectoria da lugar a un error en las mediciones de pseudodistancia y, por tanto, afecta a la exactitud posicional.
Modo nocturno
La localización en el levantamiento GNSS es una función que permite calcular los parámetros del sistema de coordenadas local o ajustar el existente para adaptarlo a los puntos de control del área de estudio.
NMEA 0183
La radio de largo alcance o LoRa se utiliza para que los receptores Reach envíen o reciban correcciones sin conexión a Internet. Reach RS3/RS2/RS2+/RS+ está equipado con radio Lora interna. El Reach M2/M+ dispone de radio LoRa externa: puedes conectarla a través del puerto S2. La radio solo funciona de una forma: o envía la corrección o la recibe. Con la modulación LoRa es posible alcanzar hasta 19 km (11,8 mi) en línea de visión.
NTRIP
La Red de transporte de RTCM a través de protocolo de Internet o NTRIP es una fuente alternativa de correcciones. NTRIP permite que tu rover reciba correcciones a través de Internet sin necesidad de que el segundo receptor local actúe como base.
Nube de puntos
La nube de puntos es un conjunto de vértices en un sistema de coordenadas tridimensional. Las nubes de puntos se crean con escáneres 3D y se utilizan en fotogrametría y modelado 3D.
Recolección de puntos
La recolección de puntos es una función de la aplicación ReachView 3 que permite encontrar las coordenadas exactas del punto. El receptor determina las coordenadas (x, y, z) de un punto del terreno y lo registra en tu proyecto para su posterior procesamiento.
Replanteo de puntos
La multitrayectoria es un efecto que se produce cuando la señal GPS es desviada por los obstáculos, por lo que el receptor GNSS detecta señales no solo directamente de los satélites, sino también de los objetos locales. El efecto multitrayectoria provoca un error en las mediciones de pseudorrango y, por tanto, afecta a la precisión posicional.
Altura del jalón
El modo nocturno permite apagar los LED hasta el siguiente reinicio del dispositivo Reach.
Registro de posiciones
Este registro contiene información sobre la posición. Los dispositivos Reach pueden registrar su posición en formato LLH, XYZ, ENU, NMEA y ERB. Mensajes compatibles: GNRMC, GNGGA, GNVTG, GNGST, GNZDA, GNEBP, GPRMC, GPGSA, GPGGA, GPGSV, GPVTG, GPGST, GPZDA, GPEBP, GLGSA, GLGSV, GAGSA, GAGSV, GBGSA y GBGSV.
Salida de la posición
Los dispositivos Reach pueden enviar los datos de posición a aplicaciones GIS de terceros y a dispositivos externos, como tractores, drones y robots, entre otros. La posición se puede compartir mediante puerto serie, TCP y Bluetooth. Una estación de referencia recoge los datos y los envía al NTRIP caster, donde se retransmiten a través del puerto de Internet al rover cliente conectado a través de un puerto determinado y autorizado.
PPK
La cinemática postprocesada es una de las técnicas utilizadas para realizar levantamientos de gran exactitud. Al igual que en RTK, se necesitan dos unidades: una base y un rover.
PPP
El Posicionamiento puntual preciso o PPP es una técnica utilizada para determinar las coordenadas exactas a nivel centimétrico del punto. El receptor colocado sobre un punto registra los datos durante un periodo determinado.
Precisión
El replanteo de puntos es una función de la aplicación Emlid Flow que permite encontrar puntos con coordenadas conocidas en el emplazamiento.
Registro de datos en bruto
Un registro de datos en bruto contiene observaciones GNSS del receptor sin el cálculo de coordenadas exactas. Se puede registrar en UBX o directamente en el formato estándar del sector, RINEX.
ReachView 3
ReachView 3 es la aplicación móvil creada por Emlid. Los dispositivos Reach pueden registrar su posición en formatos LLH, XYZ, ENU, NMEA y ERB.
Posicionamiento relativo
El posicionamiento relativo muestra tus coordenadas en relación con otro objeto de referencia. La posición se puede compartir mediante Serie, TCP y Bluetooth. Varias aplicaciones requieren diferentes formatos de los datos de posición, por eso Reach emite su posición en LLH, XYZ, ENU, NMEA y ERB.
RINEX
RINEX es un formato estándar de datos en bruto que permite almacenar las observaciones de los satélites y las mediciones de los datos de navegación realizadas por el receptor. Al igual que en RTK, se necesitan dos unidades: una base y un rover. La diferencia fundamental es que en el escenario PPK no es necesaria una conexión en tiempo real entre dos unidades. La base y el rover captan los registros por separado y estos registros se procesan juntos posteriormente utilizando un software específico de posprocesamiento, por ejemplo, RTKLIB.
RMS
La raíz cuadrada de la media del error al cuadrado. Los cálculos RMS se utilizan para evaluar la exactitud de la medición de la posición. Un dato de precisión horizontal o vertical multiplicado por tres RMS podría dar el valor de precisión horizontal o vertical respectivamente.
Rover
El rover es uno de los dos receptores GNSS que se utiliza para la recolección de datos en escenarios RTK o PPK. El rover es una unidad móvil: el topógrafo utiliza el rover para registrar los puntos, mientras que el rover recibe las correcciones de la base estática. En este caso, no necesita las coordenadas exactas de georreferenciación de los puntos, solo necesita saber que los puntos recolectados están, digamos, situados a la misma distancia unos de otros. No confundir con Exactitud.
RTCM3
QZSS son las siglas del Sistema por Satélite Cuasicenital, el sistema de satélites japonés. Atiende principalmente a la región de Asia-Pacífico, con especial atención a las necesidades japonesas de información de posicionamiento precisa y fiable. El primer satélite se lanzó el 11 de septiembre de 2010 y entró en funcionamiento en 2018.
RTK
La cinemática en tiempo real o RTK es una de las técnicas utilizadas para mejorar la exactitud de los datos recogidos desde los satélites por el receptor. Para el RTK se necesitan dos receptores: una base y un rover.
RTKCONV
RTKCONV es una herramienta de RTKLIB que convierte los datos UBX sin procesar o los datos de corrección de la base RTCM3 de un receptor al formato RINEX.
RTKLIB
RTKLIB es un paquete de programas de código abierto para el posicionamiento estándar y preciso con GNSS. Se utiliza para el procesamiento de datos PPK. Funciona con señales de GPS, GLONASS, Galileo, QZSS, BeiDou y SBAS.
RTKPLOT
RINEX es un formato estándar de datos en bruto que permite almacenar las observaciones de los satélites y las mediciones de los datos de navegación realizadas por el receptor. También permite el posprocesamiento de los datos recibidos por varias aplicaciones de diferentes fabricantes de receptores y programas.
RTKPOST
RTKPOST es una herramienta para el posprocesamiento de registros en bruto en RTKLIB. El resultado se almacena en el archivo de solución de posición en LLH WGS 84 – POS.
Puerto serie (UART, USB, RS-232)
Una interfaz de comunicación en serie en la que la información entra o sale secuencialmente bit a bit. Rover es una unidad móvil: el topógrafo utiliza el rover para registrar los puntos, mientras que el rover recibe las correcciones de la base estática.
Relación señal/ruido
El RTCM3 es un formato estándar del sector para la salida de correcciones.
Informe de sistema simple
Un informe de sistema simple es una herramienta que se utiliza para facilitar la elaboración de informes de incidencias. Para RTK se necesitan dos receptores: una base y un rover. La base envía correcciones al rover en movimiento durante la recogida de datos.
Receptor monobanda
RTKCONV es una herramienta en RTKLIB que convierte datos sin procesar UBX o datos de corrección de la base RTCM3 de un receptor a formato RINEX.
Máscara SNR
La máscara de relación señal/ruido o máscara SNR es una herramienta que filtra los satélites utilizados para la solución fix. Los satélites con un indicador SNR bajo se excluyen del cálculo. La configuración por defecto de la aplicación ReachView 3 es 35. Emlid produce la versión de RTKLIB adaptada a los productos Reach.
Estado de la solución (fix, float, single)
RTKPLOT es una herramienta de RTKLIB que permite ver y trazar las soluciones de posición de RTKPOST así como los datos de observación de RTKCONV.
Posicionamiento estático
El estado Fix significa que el posicionamiento es relativo a la base y se resuelve la ambigüedad del número entero. La precisión en el modo autónomo es centimétrica. En este archivo, obtendremos un seguimiento centimétrico del receptor.
TCP
Una interfaz de comunicación en serie en la que la información entra o sale secuencialmente bit a bit. Este tipo de comunicación se puede realizar mediante varios dispositivos como UART, USB o RS-232. Los receptores Reach pueden utilizar un puerto serie para intercambiar los datos de posición y corrección con dispositivos de terceros.
Marca de tiempo
La relación señal/ruido o SNR es el principal indicador de la calidad de la recepción. El valor es igual a la relación entre la potencia de la señal útil y la potencia del ruido. Encontrará el indicador SNR en la pantalla principal de la aplicación Emlid Flow. Cuando el indicador SNR de un satélite sea superior a 45, se marcará en verde. Las barras grises representan el indicador SNR de la estación base. Cuantos más satélites haya en una zona verde, más precisas serán sus mediciones y más rápida será su resolución de ambigüedades.
UBX
El posicionamiento estático es uno de los modos de posicionamiento. Asume que el rover Reach permanece estático.
Frecuencia de actualización
El Protocolo de control de transmisión o TCP es uno de los principales protocolos de transferencia de datos de Internet diseñado para controlar la transferencia de datos. El escenario típico para el uso del TCP es el envío de datos de corrección a una aplicación en la misma red o a un servidor con IP pública. El receptor monobanda tiene una línea base más corta en comparación con el multibanda y puede que ni siquiera encuentre un estado fix en condiciones de visibilidad del cielo limitada.
Distancia de la pendiente
La distancia en pendiente del punto A al punto B es la longitud de la línea recta AB, medida a lo largo de la pendiente, teniendo en cuenta la diferencia de altura entre los puntos.
Perímetro de la pendiente
El perímetro de la pendiente de un objeto cerrado es la suma de las distancias inclinadas de sus lados, teniendo en cuenta la diferencia de altura.
VRS
La función de marca de tiempo verifica el momento exacto en el que la cámara toma una foto. Después del vuelo, puedes procesar los registros en bruto de la base y de un rover para obtener un archivo «*_events.pos». Este archivo incluye información sobre la hora y las coordenadas de cada foto.
WGS 84
UBX es el formato de datos en bruto del GNSS. El protocolo UBX es un protocolo binario propiedad de u-blox que genera salidas en formato hexadecimal.
SINGLE significa que el rover ha encontrado una solución basándose en su propio receptor y no se aplican correcciones de base. Para los receptores Reach, se recomienda tener una frecuencia de actualización de 1 Hz en la base y 5 Hz en el rover.
FLOAT significa que el rover recibe correcciones de la base pero no puede resolver todas las ambigüedades, y en este caso, la precisión suele estar en el nivel submétrico.
FIX significa que el rover, utilizando las correcciones de la base, resolvió las ambigüedades en su cálculo posicional y alcanzó la solución con la precisión del nivel del centímetro.
XYZ
Uno de los formatos de salida de posición disponibles para los dispositivos Reach. Protocolo de texto simple para las coordenadas X, Y, Z del ECEF, así como el estado de la solución. Puede asignar a su Reach una dirección IP estática cuando lo conecte a una nueva red Wi-Fi en la aplicación Emlid Flow o en Reach Panel.
Posicionamiento estático
El posicionamiento estático es uno de los modos de posicionamiento. Asume que el rover Reach permanece estático. La restricción del sistema ayuda a resolver las ambigüedades con mayor rapidez, así como a producir mediciones con mayor precisión.
TCP
El Protocolo de control de transmisión o TCP es uno de los principales protocolos de transferencia de datos de Internet diseñado para controlar la transferencia de datos. El escenario típico para el uso del TCP es el envío de datos de corrección a una aplicación en la misma red o a un servidor con IP pública.
Marca de tiempo
La función de marca de tiempo verifica el momento exacto en el que la cámara saca una foto. Después del vuelo, puede procesar los registros en bruto de la base y de un rover para obtener un archivo «*_events.pos». Este archivo incluye información sobre la hora y las coordenadas de cada foto. Puede utilizar un software de geoetiquetado para escribir esta información en los datos EXIF de las fotos.
Acimut norte real
El acimut norte real es el ángulo comprendido entre 0 y 360 grados medido en el sentido de las agujas del reloj entre el norte real y la dirección hacia un punto de interés.
UBX
UBX es el formato de datos en bruto del GNSS. El protocolo UBX es un protocolo binario propiedad de u-blox que genera salidas en formato hexadecimal.
Tasa de actualización
La tasa de actualización es un valor que muestra la frecuencia con la que el receptor calcula e informa de su posición. Para los receptores Reach, se recomienda tener una frecuencia de actualización de 1 Hz en la base y 5 Hz en el rover.
VRS
La estación de referencia virtual o VRS es una herramienta útil para las líneas base largas. Es una estación de referencia imaginaria y no ocupada generada cerca del usuario RTK. El rover envía los datos al NTRIP caster. El NTRIP permite unir los datos de tu rover y los datos de las densas bases NTRIP y modela una base virtual junto a ti.
WGS 84
El Sistema geodésico mundial 1984 o WGS 84 es el sistema global de parámetros geodésicos de la Tierra, que incluye el sistema de coordenadas geocéntricas. Se aceptó en 1984 y define las coordenadas relativas al centro de masa de la Tierra, con un error inferior a 2 cm.
XYZ
Galileo es un sistema europeo de navegación por satélite. Protocolo de texto simple para las coordenadas X, Y, Z del ECEF, así como el estado de la solución.