Glossary
2D Grid distance
2D Grid distance between points A and B is the length of the straight line AB on a flat plane.
2D Ground distance
2D Ground distance between points A and B is the length of the shortest AB line on the surface of the ellipsoid.
2D perimeter
2D perimeter of an enclosed object is the sum of 2D distances of its sides without the height difference consideration.
Absolute positioning
Absolute positioning shows your actual global coordinates relative to the Earth’s surface. Absolute positioning is a key to RTK surveys where you need absolute geographical accuracy (e.g, mapping, surveying the borders of the property, etc). In this case, your base absolute position is crucial for high accuracy results.
Accuracy
Accuracy is the closeness of the measurements to a specific value. In surveying, accuracy refers to whether the coordinates you collected are true relative to the global coordinates. Not to be confused with Precision.
Age of corrections
Age of corrections, or Age of differential (AOD) is a measure of how old the corrections sent to the receiver are. It is calculated by subtracting the time when the correction message has been generated from the current receiver time. The standard Age of Differential for RTK is normally 1-2 seconds.
Antenna Phase Center
The antenna phase center (APC) is the effective point in a GNSS antenna to which satellite signal reception is referenced. It is not a fixed physical point–its location shifts with the direction of the incoming signal and differs by frequency band. The precise location of the antenna phase center is determined through the National Geodetic Survey’s calibration measurements, which are essential for precise GNSS positioning.
Using the obtained APC value, Emlid Flow compensates for the offset between the antenna reference point (ARP) on the bottom of Reach receivers and the APC, so you only need to enter the tripod or survey pole height.
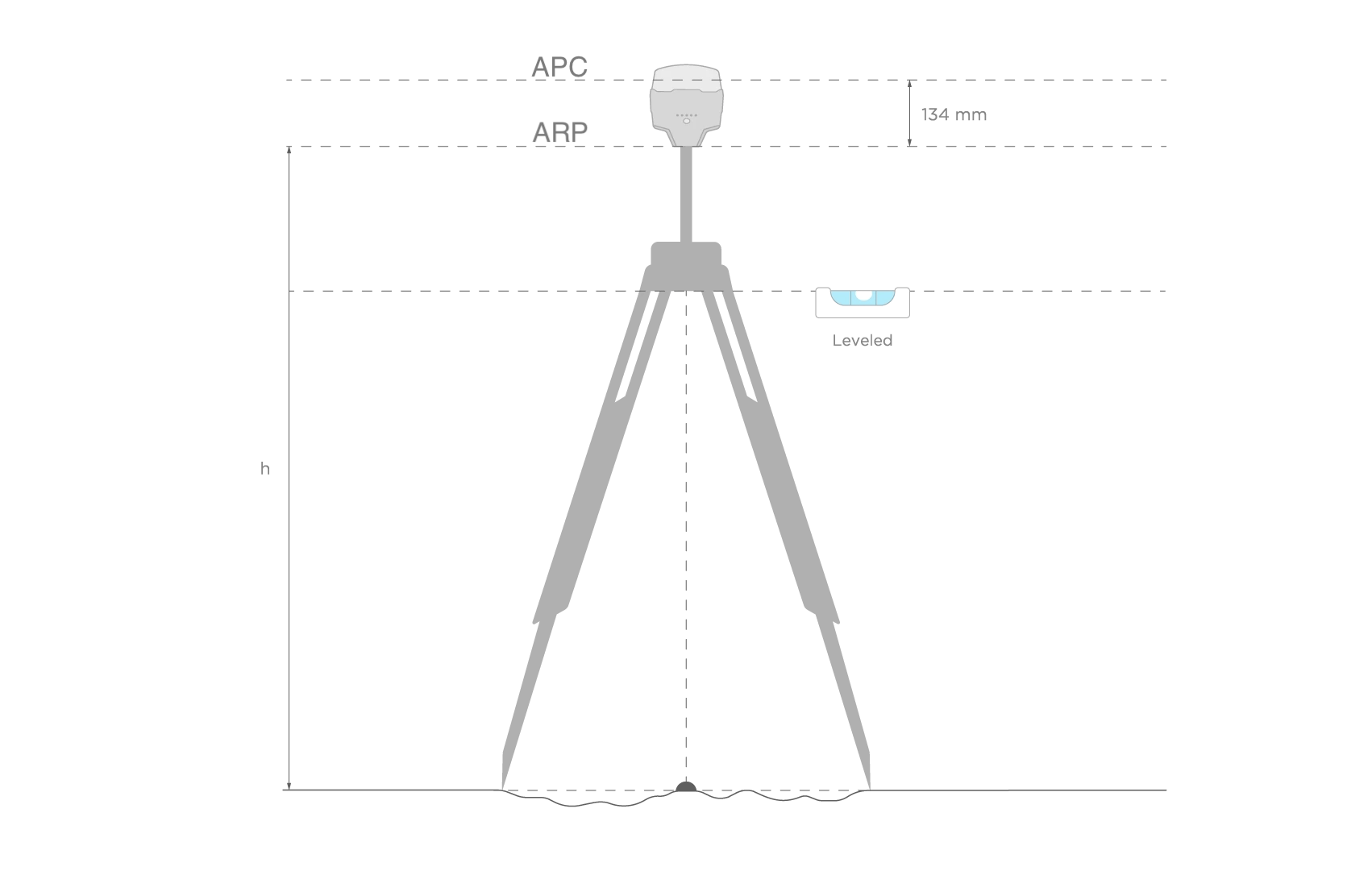
Antenna Reference Point
The antenna reference point is the center point on the bottom of the receiver. It is used for calculation of the antenna height.
Area
Area of an object is the total amount of space enclosed by its shape on flat surface.
AR ratio
This is a result of the ratio test performed on the potential “Fix” solution, it shows how many times is the best solution better than the next one. If this number is more than 3, Reach will consider RTK solution Fixed.
This parameter corresponds to single-band Reach devices only (Reach RS/RS+, Reach Module/M+).
Base
Base is one of the receivers that act as a reference station in RTK or PPK scenarios. It is a static unit with the determined coordinates that sends corrections to the moving unit or rover. If the base is set over the known point, it provides absolute accuracy.
Base Correction log
This log contains the corrections from the base station in RTCM3 format.
Baseline
Baseline is the distance between a rover and a base. If the baseline is bigger than recommended, the solution will be less accurate, the fix time will be longer or it won't be calculated at all.
Base output
Base output is the data sent by a base station to a rover. It contains corrections to improve the accuracy of positioning information. In the Emlid Flow app, on the Base output screen, you can set up how your base sends corrections in the following ways: Serial, TCP, NTRIP, Bluetooth, or LoRa. Reach devices support the base output in the RTCM3 format.
BeiDou
BeiDou is a Chinese navigation system. Back in 2000, BeiDou-1 was only covering China. Then, in 2012, BeiDou-2 began covering the Asia-Pacific region. Since 2015, BeiDou offers global coverage. We recommend using this system if you are located in the Asia-Pacific region.
Beta updates
Beta updates are pre-release software versions used for testing and feedback. They help developers find and fix issues, improve features, and gather user input to improve software quality before the official release.
Client mode
The client mode means that Reach is connected to an external Wi-Fi network.
Continuous
Continuous is a strategy for solving the ambiguities in RTK and PPK. In this case, ambiguities are resolved epoch by epoch. Less stable than Fix-and-Hold, but no risk of holding a false fix.
Coordinate system
Coordinate system is a coordinate-based local, regional or global system used to locate geographical entities. A spatial reference system defines a specific map projection, as well as transformations between different spatial reference systems.
Correction input
This is the part of the rover's settings that is responsible for configuring the acceptance of the corrections. Using the correction input configuration in the Emlid Flow app, you can choose the way your rover receives the corrections: via Serial, TCP, NTRIP, Bluetooth, or LoRa. Reach receivers support the correction input in RTCM3 format.
Corrections
The corrections are the data that is used to eliminate ionospheric and tropospheric delays, and satellite clock errors. The static base transmits corrections to the moving rover in the RTK scenario.
CORS
Continuously Operating Reference Stations or CORS network is the network of the static stations that provide exact GNSS data (carrier phase, code range, etc) and corrections as well. Surveyors can access this information to increase the accuracy of their post-processed survey data or to work in RTK on site.
Delta E/N
Delta E/N between points A and B is the difference in their coordinates along the corresponding Easting and Northing axes.
Dilution of Precision or DOP
Dilution of Precision or DOP is the term used to evaluate the geometrical position of the satellites relative to the receiver. When the satellites are too close to each other in the field of view, it means the satellite geometry is weak (a high DOP value). If the distance between the satellites is sufficient and they are allocated evenly and cover more space, the geometry is considered strong, therefore, the DOP value is low. The lower the DOP, the more accurate your data is. A good DOP value is considered to be below 2.
Direction (azimuth)
Direction (azimuth) of a line AB, or from point A to B, is a horizontal angle in degrees, measured at point A clockwise between the direction to the north and the direction to point B.
Dynamic IP address
A dynamic IP address is an Internet Protocol (IP) address that is automatically assigned to your Reach device by a DHCP (Dynamic Host Configuration Protocol) server each time your Reach device connects to the network or reboots. These addresses are temporary and can change over time, which is in contrast to static IP addresses, which remain the same.
Elevation mask
Elevation mask can be configured in RTK settings in the Emlid Flow app. Satellites lower than set elevation will be excluded from the computation. The default setting is 15 degrees. Usually, satellites with a lower elevation provide too noisy measurements as the signal passes through the most atmosphere.
Emlid Flow
Emlid Flow is the mobile app created by Emlid. It is used to control and configure the Reach receivers, create projects, collect points, etc.
ENU
One of the formats for Position streaming available for Reach devices. Simple text protocol for East, North and UP components of the baseline as well as solution status.
ERB
One of the formats for Position streaming available for Reach devices. Used for communication to ArduPilot. ERB stands for Emlid Reach Binary protocol.
External bottom connector
External bottom connector is a 9-pin connector located at the bottom of Reach RS/RS+, RS2/RS2+, and RS3. It is used to supply constant power from an external battery, to establish RTK communication with third-party devices, and to stream Reach's position to other devices or third-party apps. It uses RS-232 serial communication protocol.
Fix-and-Hold
Fix-and-Hold is a strategy for solving the ambiguities in RTK and PPK. After the first ambiguity fix holds them constrained. Fix is more stable but in case first initialization was not correct it will take longer to recover and initialize correctly. You can think of it as if Fix had inertia.
Full System report
A full system report is a tool used to facilitate issues reports. It comes in ZIP archive, and contains system logs and technical details of your device as well as some sensitive information like your NTRIP credentials or network passwords. That is why we do not recommend sharing the report publicly. These are used to debug complicated cases in support.
Galileo
Galileo is a European satellite navigation system. It first started operating in 2011 and now has global coverage.
Global datum
Global datum is an ellipsoidal coordinate reference system that is used by the receiver to measure coordinates before any transformations are applied.
Grade
Grade of a line is the measure of its steepness, with larger values standing for steeper slopes and 0% indicating a horizontal line.
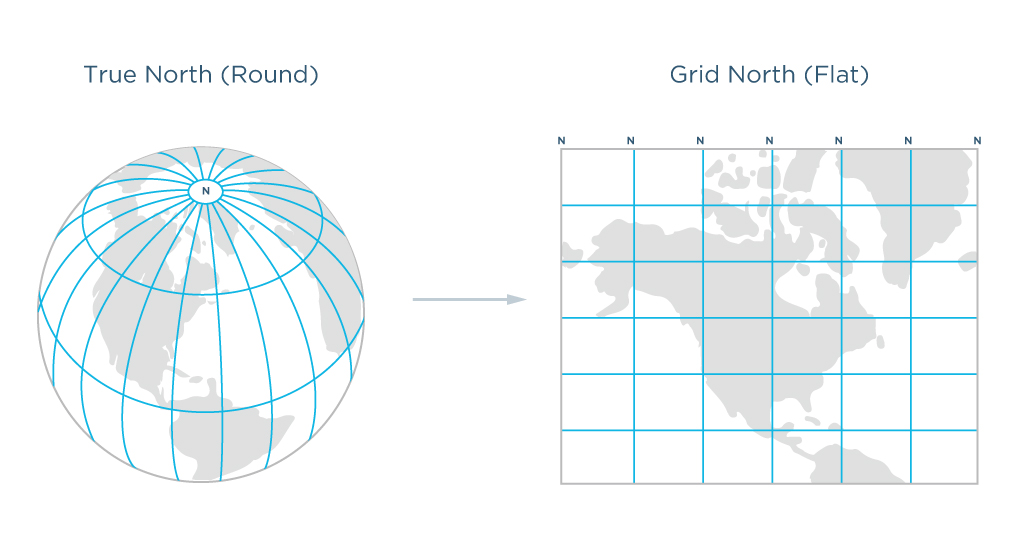
Grid North azimuth
Grid North azimuth is the angle measured clockwise between a line parallel to the central meridian, and the direction to a point of interest (a straight line between two points on the projection flat plane).
Grid distance
Grid distance is the distance measured on the projection flat plane.
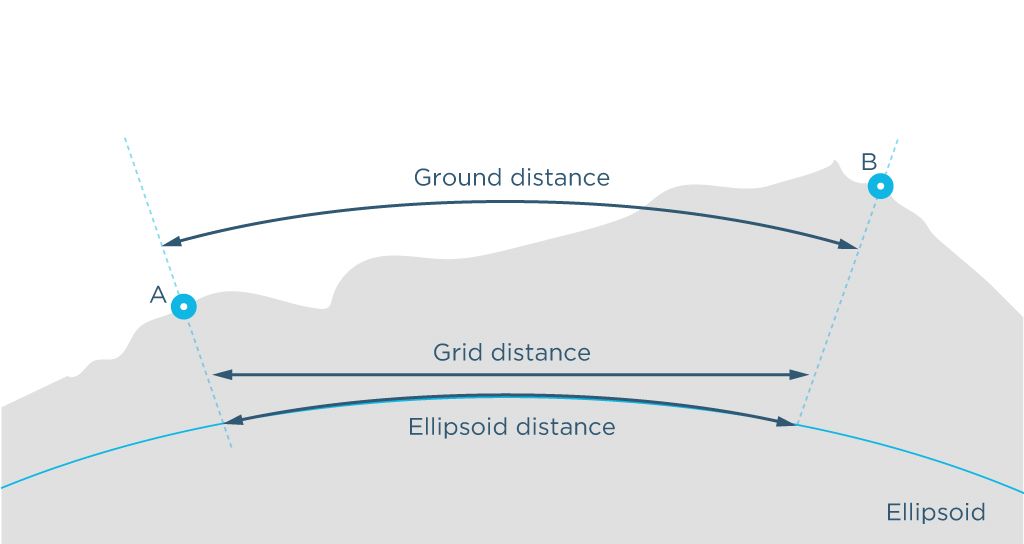
Ground distance
Ground distance is the distance measured on the actual surface of the Earth, taking the mean elevation of the measured points into account.
Ground Control Point or GCP
Ground Control Point is a point on a surface with known coordinates. The GCPs are actively used in aerial mapping and photogrammetry. The surveyors set GCPs over the area, mark them so they can be visible from the drone. The GCPs are then surveyed to find their exact coordinates and used as reference points for future data processing.
GIS
Geographic Information System or GIS is a system for collecting, storing, analyzing, and graphically visualizing spatial data and related information about required objects.
GLONASS
GLONASS is a global satellite navigation system. It was created as an alternative to GPS in Soviet Union and first launched in 1982.
GLONASS AR mode
A processing parameter enabling to turn on and off the ambiguity resolution for the GLONASS signal separately. Contrary to GPS, all GLONASS satellites transmit on different frequencies, which results in Inter Channel Biases (ICB) that are unique for each receiver model.
Reach devices can correct GLONASS ICBs, allowing for GLONASS AR with non-Reach bases such as NTRIP casters. The general recommendation is to always have GLONASS AR set to on.
This parameter corresponds to single-band Reach devices only (Reach RS/RS+, Reach Module/M+).
GNSS
Global Navigation Satellite System or GNSS is a system designed to determine the location (geographical coordinates) of land, water, and air objects. Such systems consist of space equipment, a ground segment called control systems, and individual receivers. The operation of GNSS is based on measuring the distance from the antenna on the object (receiver) to satellites whose position is known with great accuracy.
GPS
Global Positioning System or GPS is a global satellite navigation system that measures distance, time, and location in the WGS 84 world coordinate system. The system was developed in 1978, and is operated by the United States.
Ground plane
A ground plane is a conductive plate providing insulation for the antenna. It may be a piece of metal, a roof of a car, a metal roof of a building, and etc. It is recommended to use at least a 70x70 mm ground plane.
Hot shoe adapter
Hot shoe is a point on the top of a camera that is used to attach accessories or other equipment to the camera. Using hot shoe adapter, you can connect your camera to Reach M2/M+ for UAV mapping.
Hotspot mode
The hotspot mode means that the Reach is broadcasting its own Wi-Fi network.
Kinematic Positioning
Kinematic positioning is one of two positioning modes. It implies that the rover is moving during the positioning process.
LLH
One of the formats for Position streaming available for Reach devices. Simple text protocol for Latitude, Longitude, and Height as well as solution status.
Localization
Localization in GNSS surveying is a feature for calculating local coordinate system parameters or adjusting the existing one to fit control points in the survey area.
LoRa radio
Long Range or LoRa radio is used for Reach receivers to send or receive corrections without an Internet connection. Reach RS3/RS2/RS2+/RS+ is equipped with internal Lora radio. Reach M2/M+ has external LoRa radio available: you can connect it via S2 port. The radio works only one way: it either sends correction or receives them. Using LoRa modulation it is possible to hit up to 19 km (11.8 mi) in line of sight.
Mock location
Mock location feature of Android devices enables you to manually change the location of your device to any other place. In the case of Reach devices, it enables the GPS collector apps to get the GPS observations directly from the receiver instead of the internal GPS of the unit.
Mount Point
Mount point is a correction data source related to the specific physical or virtual reference station chosen or created based on your location respectively. When you get corrections from a VRS, you need to enable sending your receiver's position in the NMEA format.
Multi-band receiver
A multi-band receiver is a receiver that can accept signals from the satellite on more than one frequency band. It means the receiver takes less time to establish the first fix solution, has a longer baseline, and has more chances to maintain fix solution in the blocked sky view conditions.
Multipath
Multipath is an effect occurring when the GPS signal is deflected from the obstacles, so the GNSS receiver detects signals not only directly from the satellites but also from the local objects. Multipath effect results in an error in pseudo-range measurements and thus affects the positional accuracy.
Night mode
Night mode allows you to turn off the LEDs until the next reboot of the Reach device.
NMEA 0183
One of the formats for position streaming available for Reach devices. The most popular standard in the industry. Supported messages: GNRMC, GNGGA, GNVTG, GNGST, GNZDA, GNEBP, GPRMC, GPGSA, GPGGA, GPGSV, GPVTG, GPGST, GPZDA, GPEBP, GLGSA, GLGSV, GAGSA, GAGSV, GBGSA, GBGSV.
NTRIP
The Networked Transport of RTCM via Internet Protocol or NTRIP network is an alternative source of corrections. NTRIP allows your rover to accept corrections over the Internet with no need for the second local receiver acting as a base. A reference station collects data, then sends it to NTRIP caster, where it is retransmitted through the Internet port to the client rover connected via a particular port and authorized.
Point cloud
Point cloud is a set of vertexes in a three-dimensional coordinate system. Point clouds are created with 3D scanners and are used in photogrammetry and 3D-modeling.
Point Collection
Point collection is a feature in the Emlid Flow app that allows you to find the exact coordinates of the point. The receiver determines the coordinates (x, y, z) of a ground point and records it to your project for further processing .
Point Stakeout
Point stakeout is a feature in the Emlid Flow app that allows finding points with known coordinates on the site.
Pole Height
When preparing for point collection, configure the height of your survey pole in Emlid Flow. It will help the app to automatically calculate the antenna height.
Position log
This log contains positional information. Reach devices can log their position in LLH, XYZ, ENU, NMEA, and ERB formats.
Position streaming
Reach devices can send the position data to third-party GIS apps and external devices including tractors, drones, robots, and more. The position could be out shared via Serial, TCP, and Bluetooth. Various applications require different formats of the positional data, that is why Reach outputs its position in LLH, XYZ, ENU, NMEA, and ERB.
PPK
Post-Processed Kinematic is one of the techniques used for highly accurate surveys. Same as in RTK, one needs two units: a base and a rover. The core difference is that in PPK scenario there is no need for a real-time connection between two units. Base and rover record logs separately, and these logs are processed together later using specific post-processing software, for example, RTKLib.
PPP
Precise Point Positioning or PPP is a technique used for determining the centimeter-level accurate coordinates of the point. The receiver put over a point is recording data for a certain period. Then this data is sent to the PPP services.
Precision
Precision is the closeness of two or more measurements to each other. Precision means that the coordinates you collected are true relatively to another object. In this case, you do not need exact georeferencing coordinates of the points, you only need to know that the collected points are, say, situated on the same distance from each other. Not to be confused with Accuracy.
QZSS
QZSS stands for Quasi-Zenith Satellite System—the Japanese satellite system. It primarily serves the Asia-Pacific region, with a particular focus on Japan's needs for precise and reliable positioning information. The first satellite was launched on September 11, 2010, and became operational in 2018.
Raw data log
A raw data log contains GNSS observations from the receiver without the calculation of accurate coordinates. It can be recorded in UBX or directly in industry-standard RINEX format.
Reach Panel
Reach Panel is a tool that allows you to access your Reach in a browser, monitor its status and get additional options such as downloading a large number of logs and configuring NMEA messages output on your Reach to integrate it with old agricultural machinery.
Relative positioning
Relative positioning shows your coordinates relatively to another reference object. The base sends information about its absolute position to the rover. Using this information, the rover determines its position relative to the base with centimeter accuracy.
RINEX
RINEX is a standard raw-data format that allows storing satellite observations and navigational data measurements made by the receiver. It also allows the post-processing of the received data by various applications from different manufacturers of receivers and programs.
RMS
The square root of the average of the squared error. The RMS calculations are used to evaluate the accuracy of the position measurement.
Rover
Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
RTCM3
RTCM3 is an industry standard format for correction output.
RTK
Real-Time Kinematic or RTK is one of the techniques used to improve the accuracy of the data collected from the satellites by the receiver. For RTK one needs two receivers: a base and a rover. The base sends corrections to the moving rover during data collection.
RTKCONV
RTKCONV is a tool in RTKLIB that converts UBX raw data or RTCM3 base correction data from a receiver to RINEX format.
RTKLIB
RTKLIB is an open-source program package for standard and precise positioning with GNSS. It is used for PPK data processing. Works with signals from GPS, GLONASS, Galileo, QZSS, BeiDou, and SBAS. Emlid produces the version of RTKLib tailored for Reach products.
RTKPLOT
RTKPLOT is a tool in RTKLIB that allows viewing and plotting the position solutions from RTKPOST as well as observation data from RTKCONV.
RTKPOST
RTKPOST is a tool for post-processing raw logs in RTKLIB. The result is stored in the position solution file in LLH in geographical coordinates – POS file. In this file, we will get centimeter-accurate track of the receiver.
Serial Port (UART, USB, RS-232)
A serial communication interface in which the information transfers in or out sequentially one bit at a time. That kind of communication could be realized via various devices like UART, USB, or RS-232. Reach receivers can use a serial port to exchange the position and correction data with 3rd party devices.
Signal-to-noise ratio
Signal-to-Noise Ratio or SNR is the primary indicator of how good the reception is. The value is equal to the ratio of the power of the useful signal to the noise power. You can find the SNR indicator on the main screen of the Emlid Flow app. When the SNR of a satellite is over 45, it will be marked green. Grey bars indicate SNR of the base station. The more satellites are in a green zone, the more precise your measurements are and the faster your ambiguity resolution is.
Simple System report
A Simple System report is a tool used to facilitate issues reports. It provides information about the Emlid Flow version, configurations, and network in a plain text format.
Single-band receiver
A Single-band receiver is a device that accepts signals from the satellite on one frequency band. It has the same level of accuracy as the multi-band one. Single-band receiver has shorter baseline in comparison to multi-band, and might not even find fix solution in blocked sky view conditions.
Slope distance
Slope distance from point A to point B is the length of the straight line AB, measured along the slope, taking the height difference between the points into account.
Slope perimeter
Slope perimeter of an enclosed object is the sum of slope distances of its sides with the height difference consideration.
SNR mask
Signal-to-Noise ratio mask or SNR mask is a tool that filters the satellites used for the fix solution. Satellites with low SNR will be excluded from the computation. The default setting in Emlid Flow app is 35.
Solution status (fix, float, single)
Solution status defines the precision that can be achieved at the moment. There are three solution statuses you can see when working with Reach devices.
SINGLE means that the rover has found a solution relying on its own receiver and base corrections are not applied. Precision in standalone mode is usually at the several-meter level.
FLOAT means that the rover receives corrections from the base but cannot resolve all ambiguities, and in this case, the precision is usually at the submeter-level.
FIX means that the rover using corrections from the base resolved the ambiguities in its positional calculation and achieved the solution with the centimeter-level precision.
Static IP address
A static IP address is a fixed, unchanging Internet Protocol (IP) address manually configured for your Reach device. It does not change over time, unlike a dynamic IP address, which may be assigned by a DHCP (Dynamic Host Configuration Protocol) server and can change each time your Reach connects to the network or reboots. You can assign your Reach a static IP address when you connect it to a new Wi-Fi network in the Emlid Flow app or Reach Panel.
Static Positioning
Static positioning is one of the positioning modes. It assumes that the Reach rover is static. Constraining the system helps to resolve ambiguities faster as well as produce measurements with higher precision.
TCP
Transmission Control Protocol or TCP is one of the main Internet data transfer protocols designed to control data transfer. Typical scenario for using TCP is sending correction data to an application on the same network or to a server with public IP.
Time mark
The time mark function verifies the exact moment when the camera takes a photo. After the flight, you can process the raw logs from the base and a rover to get an «*_events.pos» file. This file includes information about the time and coordinates of each photo. You can use geotagging software to write this information to the photos' EXIF data.
True North azimuth
True North azimuth is the angle ranging from 0 to 360 degrees measured clockwise between True North and the direction to a point of interest.
UBX
UBX is the GNSS raw data format. The UBX protocol is a u-blox proprietary binary protocol that outputs in hexadecimal format.
Update rate
The update rate is a value that shows how frequently the receiver calculates and reports its position. For Reach receivers, we recommend having 1 Hz update rate on the base and 5 Hz on the rover.
VRS
Virtual Reference Station or VRS is a useful tool for long baselines. It is an imaginary, unoccupied reference station generated nearby the RTK user. The rover sends data back to the NTRIP caster. NTRIP allows the uniting of the data from your rover and the data from dense NTRIP bases and models a virtual base next to you.
WGS 84
World Geodetic System 1984 or WGS 84 is the global system of geodetic parameters of the Earth, including the system of geocentric coordinates. It was accepted in 1984 and defines coordinates relative to the Earth's center of mass, with an error of less than 2 cm.
XYZ
One of the formats for Position streaming available for Reach devices. Simple text protocol for X, Y, Z ECEF coordinates as well as solution status.