Glossário
Distância cartográfica 2D
A distância cartográfica 2D entre os pontos A e B é o comprimento da linha reta AB em um plano.
Distância terrestre 2D
A distância terrestre 2D entre os pontos A e B é o comprimento da linha AB mais curta na superfície do elipsoide.
Idade do diferencial
O perímetro 2D de um objeto fechado é a soma das distâncias 2D de seus lados sem levar em consideração a diferença de altura.
Posicionamento absoluto
O posicionamento absoluto mostra as suas coordenadas globais atuais relativamente à superfície da Terra. O posicionamento absoluto é fundamental para os levantamentos RTK em que é necessária uma exatidão geográfica absoluta (por exemplo, cartografia, levantamento dos limites da propriedade, etc.). Neste caso, a posição absoluta da base é crucial para obter resultados de elevada exatidão.
Exatidão
A exatidão é a proximidade das medições a um valor específico. Em topografia, exatidão refere-se ao fato de as coordenadas recolhidas serem verdadeiras em relação às coordenadas globais. Não confundir com Precisão.
Idade do diferencial
A idade do diferencial é a medida da idade das correções que o seu receptor está recebendo. É calculado subtraindo o instante em que a mensagem de correção foi gerada do instante atual do receptor. A idade padrão do diferencial para RTK é normalmente de 1-2 segundos.
Centro de fase da antena
O centro de fase da antena pode ser referido como a fonte de radiação da antena. Todas as medições GNSS referem-se ao centro de fase. O centro de fase não corresponde ao centro físico da antena e a sua posição real depende da direção do sinal de rádio entrante. Além disso, cada banda tem o seu próprio centro de fase, respectivamente.
Ponto de referência da antena
O ponto de referência da antena é o ponto central na parte inferior do receptor. É utilizado para o cálculo da altura da antena.
Área
A área de um objeto é a quantidade total de espaço delimitada por sua forma em uma superfície plana.
Relação AR
Este é o resultado do teste de razão realizado na solução potencial “Fix”, que mostra quantas vezes a melhor solução é melhor que a segunda opção. Se este número for superior a 3, o Reach considerará a solução RTK Fixa.
Este parâmetro corresponde apenas a dispositivos Reach monobanda (Reach RS/RS+, Reach Module/M+).
Base
A base é um dos receptores que atua como estação de referência em cenários RTK ou PPK. É uma unidade estática com as coordenadas determinadas que envia correções para a unidade móvel ou rover. Se a base for colocada sobre o ponto conhecido, ela vai proporcionar uma exatidão absoluta.
Log de correção de base
Este log contém as correções da estação de base no formato RTCM3.
Linha de base
A linha de base é a distância entre um rover e uma base. Se a linha de base for maior do que a recomendada, a solução será menos exata, o tempo de correção será mais longo ou não será sequer calculado.
BeiDou
BeiDou é um sistema de navegação chinês. Em 2000, o BeiDou-1 cobria apenas a China. Depois, em 2012, o BeiDou-2 começou a cobrir a região Ásia-Pacífico. Desde 2015, o BeiDou oferece uma cobertura global.
Modo cliente
BeiDou é um sistema de navegação chinês. Em 2000, o BeiDou-1 cobria apenas a China. Depois, em 2012, o BeiDou-2 começou a cobrir a região Ásia-Pacífico. Desde 2015, o BeiDou oferece uma cobertura global. Recomendamos a utilização deste sistema se você estiver localizado na região Ásia-Pacífico.
Contínuo
O contínuo é uma estratégia para resolver as ambiguidades em RTK e PPK. Neste caso, as ambiguidades são resolvidas época a época.
Sistema de coordenadas
O modo cliente significa que o Reach está conectado a uma rede Wi-Fi externa.
Entrada de correção
Esta é a parte das configurações do rover que é responsável por configurar a aceitação das correções. Utilizando a configuração da entrada de correção (correction input) no aplicativo Emlid Flow, você pode escolher a forma como o seu rover recebe as correções: via Serial, TCP, NTRIP, Bluetooth, ou LoRa. Os receptores Reach suportam a entrada de correção no formato RTCM3.
Correções
As correções são os dados utilizados para eliminar os atrasos ionosféricos e troposféricos e os erros do relógio do satélite. A base estática transmite correções ao rover em movimento no cenário RTK.
CORS
A rede de estações de referência em funcionamento contínuo, ou rede CORS, é a rede de estações estáticas que fornecem dados GNSS exatos (fase portadora, faixa de códigos, etc.) e também correções. Os topógrafos podem acessar esta informação para aumentar a exatidão dos seus dados de levantamento pós-processados ou para trabalhar com RTK no local. Os receptores Reach suportam a entrada de correção no formato RTCM3.
Diluição da precisão ou DOP
Diluição da precisão (Dilution of Precision), ou DOP, é o termo utilizado para avaliar a posição geométrica dos satélites em relação ao receptor. Quando os satélites estão demasiado próximos uns dos outros no campo de visão, significa que a geometria do satélite é fraca (um valor DOP elevado).
Máscara de elevação
A máscara de elevação pode ser configurada nas configurações RTK no aplicativo Emlid Flow. Os satélites mais baixos do que a elevação definida serão excluídos do cálculo.
Delta E/N
O delta E/N entre os pontos A e B é a diferença em suas coordenadas ao longo dos eixos leste e norte correspondentes.
ENU
Um dos formatos para a transmissão de posição disponível para dispositivos Reach. Protocolo de texto simples para os componentes Leste, Norte e ACIMA da linha de base, assim como para o status da solução. Se a distância entre os satélites for suficiente e estes forem distribuídos uniformemente e cobrirem mais espaço, a geometria é considerada forte, assim o valor de DOP é baixo. Quanto mais baixo for o DOP, mais exatos serão os dados. Considera-se que um bom valor de DOP é inferior a 2.
Direção (azimute)
A direção (azimute) de uma linha AB, ou do ponto A ao B, é um ângulo horizontal em graus, medido no ponto A no sentido horário entre a direção para o norte e a direção para o ponto B.
ERB
Um dos formatos para a transmissão de posição disponível para dispositivos Reach. Utilizado para comunicação com o ArduPilot.
Fix-and-Hold
Fix-and-Hold é uma estratégia para resolver as ambiguidades em RTK e PPK. Após a primeira ambiguidade, o estado fix os mantém limitados. O estado fix é mais estável, mas caso a primeira inicialização não tenha sido correta, vai demorar mais tempo a recuperar e a inicializar corretamente. Normalmente, os satélites com uma elevação mais baixa fornecem medições demasiado ruidosas, uma vez que o sinal atravessa uma faixa maior de atmosfera.
Relatório de sistema completo
Um relatório de sistema completo é uma ferramenta utilizada para facilitar os relatórios de problemas. Vem num arquivo ZIP e contém os logs do sistema e detalhes técnicos do seu dispositivo, assim como algumas informações sensíveis como suas credenciais NTRIP ou senhas de rede.
Galileo
O Galileo é um sistema europeu de navegação por satélite. Começou a funcionar em 2011 e tem atualmente uma cobertura global.
Ponto de Controle Terrestre ou GCP
O Ponto de Controle Terrestre é um ponto numa superfície com coordenadas conhecidas. Os GCPs são utilizados ativamente na cartografia aérea e na fotogrametria. ERB é a sigla do protocolo Emlid Reach Binary.
GIS
O conector inferior externo é um conector de 9 pinos localizado na parte inferior do Reach RS/RS+, RS2/RS2+ e RS3. Ele é usado para fornecer energia constante a partir de uma bateria externa, para estabelecer comunicação RTK com dispositivos de terceiros e para transmitir a posição do Reach para outros dispositivos ou aplicativos de terceiros. Ele usa o protocolo de comunicação serial RS-232.
GLONASS
Fix-and-Hold é uma estratégia para resolver as ambiguidades em RTK e PPK. Após a primeira ambiguidade, o estado fix os mantém limitados. O estado fix é mais estável, mas caso a primeira inicialização não tenha sido correta, vai demorar mais tempo a recuperar e a inicializar corretamente. Pode pensar-se nisso como se o Fix tivesse inércia.
Modo GLONASS AR
Um parâmetro de processamento que permite ativar e desativar a resolução de ambiguidades para o sinal GLONASS separadamente. Ao contrário do GPS, todos os satélites GLONASS transmitem em frequências diferentes, o que resulta em desvios inter-canal (ICB) que são únicos para cada modelo de receptor. É por isso que não recomendamos o compartilhamento público do relatório. Estes são utilizados para depurar casos complicados no suporte.
GNSS
Os dispositivos Reach podem corrigir os ICBs do GLONASS, permitindo o uso de GLONASS AR com bases não-Reach, como os lançadores NTRIP. A recomendação geral é ter o GLONASS AR sempre configurado como ativado.
Datum global
O datum global é um sistema de referência de coordenadas elipsoidais usado pelo receptor para medir as coordenadas antes da aplicação de qualquer transformação.
Greide
O greide de uma linha é a medida de sua inclinação, com valores maiores representando inclinações mais acentuadas e 0% indicando uma linha horizontal.
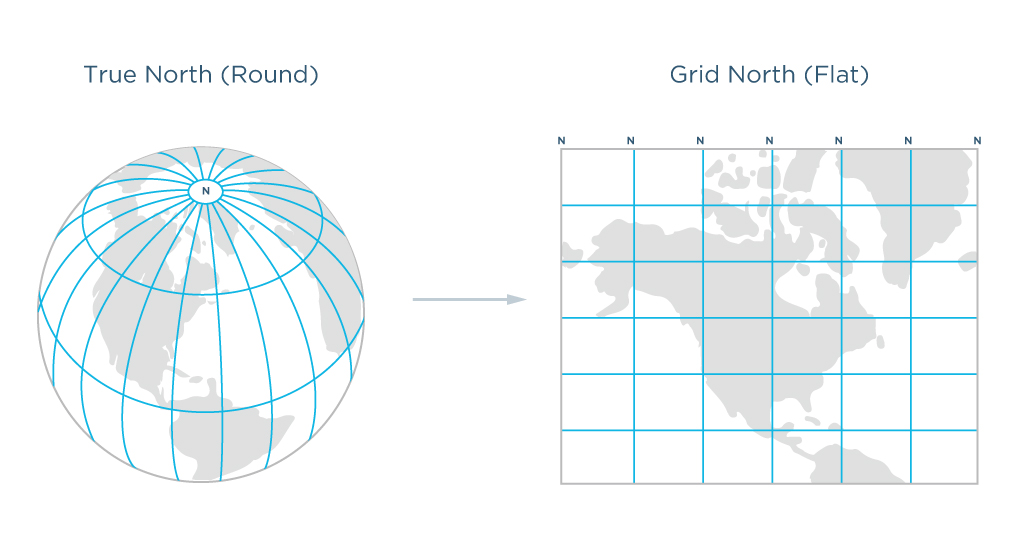
Azimute norte cartográfico
O azimute norte cartográfico é o ângulo medido no sentido horário entre uma linha paralela ao meridiano central e a direção de um ponto de interesse (uma linha reta entre dois pontos no plano da projeção).
Distância cartográfica
A distância cartográfica é a distância medida no plano da projeção.
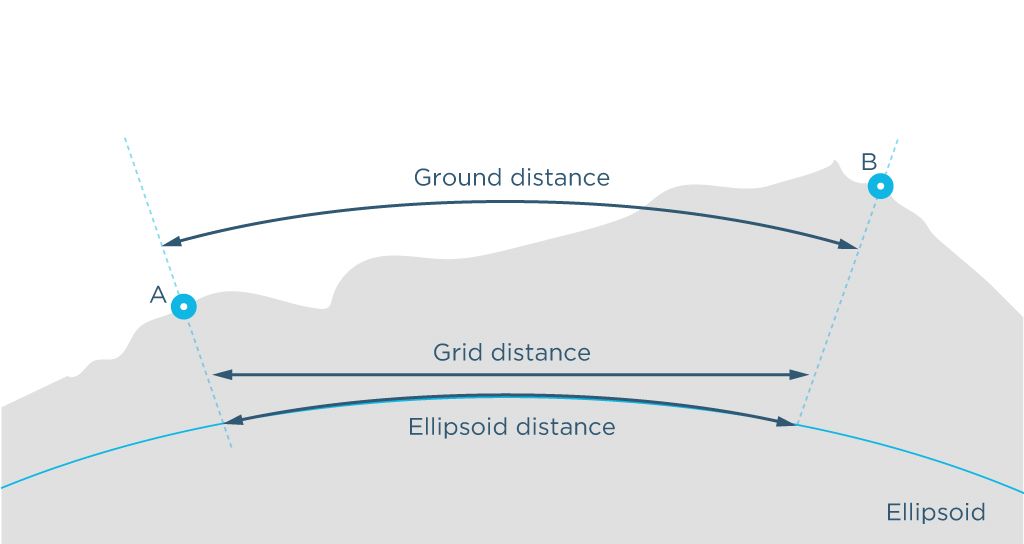
Distância terrestre
A distância terrestre é a distância medida na superfície real da Terra, levando em conta a elevação média dos pontos medidos.
GPS
O Ponto de Controle Terrestre é um ponto numa superfície com coordenadas conhecidas. Os GCPs são utilizados ativamente na cartografia aérea e na fotogrametria. Os topógrafos definem os GCPs sobre a área e os marcam para que sejam visíveis a partir do drone. Os GCPs são então levantados para encontrar as suas coordenadas exatas e utilizados como pontos de referência para posterior processamento dos dados.
Plano de terra
Um Sistema de Informação Geográfica ou GIS é um sistema para recolher, armazenar, analisar e visualizar graficamente dados espaciais e informações relacionadas sobre os objetos necessários.
Adaptador de sapata
O Sistema de Posicionamento Global ou GPS é um sistema global de navegação por satélite que mede a distância, o tempo e a localização no sistema mundial de coordenadas WGS 84. O sistema foi desenvolvido em 1978 e é operado pelos Estados Unidos.
Modo hotspot
Um plano de terra é uma placa condutora que fornece isolamento para a antena. Pode ser uma peça de metal, o teto de um automóvel, o telhado metálico de um edifício, etc.
A sapata é um ponto na parte superior de uma câmera utilizado para fixar acessórios ou outro equipamento à câmera. Usando um adaptador de sapata, você pode conectar a sua câmara ao Reach M2/M+ para mapeamento com VANTs.
Este parâmetro corresponde apenas a dispositivos Reach monobanda (Reach RS/RS+, Reach Module/M+).
Posicionamento cinemático
O Sistema Global de Navegação por Satélite ou GNSS é um sistema concebido para determinar a localização (coordenadas geográficas) de objectos terrestres, aquáticos e aéreos. Estes sistemas são constituídos por equipamentos espaciais, um segmento terrestre denominado sistemas de controle e receptores individuais. O funcionamento do GNSS baseia-se na medição da distância entre a antena do objeto (receptor) e os satélites cuja posição é conhecida com grande exatidão.
LLH
Um dos formatos para a transmissão de posição disponível para dispositivos Reach. Protocolo de texto simples para Latitude, Longitude e Altura, bem como para o status da solução.
Rádio LoRa
O rádio de longo alcance ou LoRa é utilizado para que os receptores Reach enviem ou recebam correções sem uma conexão à Internet. O Reach RS2/RS2+/RS+ está equipado com um rádio Lora interno. Recomenda-se a utilização de um plano de terra de, pelo menos, 70x70 mm.
Localização simulada (mock location)
A funcionalidade de localização simulada (mock location) dos dispositivos Android permite alterar manualmente a localização do seu dispositivo para qualquer outro local. No caso dos dispositivos Reach, permite que as aplicações de GPS obtenham as observações GPS diretamente do receptor em vez de usar o GPS interno da unidade.
Estação de referência
O modo hotspot significa que o Reach está transmitindo a sua própria rede Wi-Fi.
Receptor multibanda
Um receptor multibanda é um receptor que pode aceitar sinais do satélite em mais de uma banda de frequência. Isto significa que o receptor demora menos tempo para estabelecer a primeira solução de fixação, tem uma linha de base mais longa e tem mais chances de manter a solução de fixação em situações de céu bloqueado.
Multitrajetória
Multitrajetória é um efeito que ocorre quando o sinal GPS é desviado dos obstáculos, de forma que o receptor GNSS detecta não apenas os sinais que vêm diretamente dos satélites, mas também de objetos locais. O efeito multitrajetória resulta num erro nas medições de pseudo-alcance, afetando assim a exatidão posicional.
Modo noturno
A localização no levantamento GNSS é um recurso para calcular os parâmetros do sistema de coordenadas local ou ajustar o existente para se adequar aos pontos de controle na área de levantamento.
NMEA 0183
O rádio de longo alcance ou LoRa é utilizado para que os receptores Reach enviem ou recebam correções sem uma conexão à Internet. O Reach RS2/RS2+/RS+ está equipado com um rádio Lora interno. O Reach M2/M+ tem disponível um rádio LoRa externo: você pode conectá-lo através da porta S2. O rádio só funciona de uma forma: ou envia correções ou as recebe. Utilizando a modulação LoRa, é possível atingir até 19 km (11,8 mi) em linha de visão.
NTRIP
A rede NTRIP (Networked Transport of RTCM via Internet Protocol) é uma fonte alternativa de correções. O NTRIP permite que o seu rover aceite correções através da Internet, sem a necessidade de um segundo receptor local funcionando como base.
Nuvem de pontos
A nuvem de pontos é um conjunto de vértices num sistema de coordenadas tridimensional. As nuvens de pontos são criadas com scanners 3D e são utilizadas em fotogrametria e modelagem 3D.
Coleta de pontos
A coleta de pontos é uma funcionalidade do aplicativo Emlid Flow que permite encontrar as coordenadas exatas do ponto. O receptor determina as coordenadas (x, y, z) de um ponto no solo e registra no seu projeto para processamento posterior.
Locação de pontos
Multitrajetória é um efeito que ocorre quando o sinal GPS é desviado dos obstáculos, de forma que o receptor GNSS detecta não apenas os sinais que vêm diretamente dos satélites, mas também de objetos locais. O efeito multitrajetória resulta num erro nas medições de pseudo-alcance, afetando assim a exatidão posicional.
Altura do bastão
O modo noturno permite que você desligue os LEDs até a próxima reinicialização do dispositivo Reach.
Log de posições
Este log contém informações de posição. Os dispositivos Reach podem registrar a sua posição nos formatos LLH, XYZ, ENU, NMEA, e ERB. Mensagens suportadas: GNRMC, GNGGA, GNVTG, GNGST, GNZDA, GNEBP, GPRMC, GPGSA, GPGGA, GPGSV, GPVTG, GPGST, GPZDA, GPEBP, GLGSA, GLGSV, GAGSA, GAGSV, GBGSA, GBGSV.
Transmissão de posição
Os dispositivos Reach podem enviar os dados de posição para aplicações GIS de terceiros e dispositivos externos, incluindo tratores, drones, robôs e muito mais. A posição pode ser compartilhada através de Serial, TCP, e Bluetooth. Uma estação de referência coleta dados e os envia para o NTRIP caster, onde são retransmitidos através da porta Internet para o rover cliente conectado através de uma porta específica e autorizada.
PPK
A cinemática pós-processada (Post-Processed Kinematic - PPK) é uma das técnicas utilizadas para levantamentos de elevada exatidão. Assim como em RTK, são necessárias duas unidades: uma base e um rover.
PPP
O Posicionamento por Ponto Preciso ou PPP é uma técnica utilizada para determinar as coordenadas exatas do ponto a um nível centimétrico. O receptor colocado sobre um ponto está registrando dados durante um determinado período.
Precisão
A locação de pontos (point stakeout) é uma funcionalidade do aplicativo Emlid Flow que permite encontrar pontos com coordenadas conhecidas no local.
Log de dados brutos
Um log de dados brutos contém observações GNSS do receptor sem o cálculo de coordenadas exatas. Pode ser gravado em UBX ou diretamente no formato RINEX, padrão da indústria.
Emlid Flow
O Emlid Flow é o aplicativo móvel criado pela Emlid. É utilizada para controlar e configurar os receptores Reach, criar projetos, coletar pontos, etc.
Posicionamento relativo
O posicionamento relativo mostra as suas coordenadas relativamente a outro objeto de referência. A base envia informações sobre a sua posição absoluta para o rover. Utilizando esta informação, o rover determina a sua posição relativamente à base com uma exatidão centimétrica.
RINEX
O RINEX é um formato normalizado de dados brutos que permite armazenar observações de satélite e medições de dados de navegação realizadas pelo receptor. Permite também o pós-processamento dos dados recebidos por várias aplicações de diferentes fabricantes de receptores e programas. A principal diferença é que no cenário PPK não é necessária uma conexão em tempo real entre duas unidades. A base e o rover registram os registros separadamente e estes registros são posteriormente processados em conjunto utilizando software específico de pós-processamento, por exemplo, RTKLib.
RMS
A raiz quadrada da média do erro ao quadrado. Os cálculos RMS são utilizados para avaliar a exatidão da medição da posição. Uma diluição horizontal ou vertical da precisão multiplicada por três RMS pode dar o valor da precisão horizontal ou vertical, respectivamente.
Rover
O Rover é um dos dois receptores GNSS que é utilizado para coletar dados em cenários RTK ou PPK. O rover é uma unidade móvel: o topógrafo utiliza o rover para registrar os pontos, enquanto o rover recebe as correções da base estática. Neste caso, não são necessárias coordenadas georreferenciadas exatas dos pontos, basta saber que os pontos recolhidos estão, digamos, situados à mesma distância uns dos outros. Não deve ser confundido com Precisão.
RTCM3
QZSS é a sigla de Quasi-Zenith Satellite System, o sistema de satélites japonês. Ela atende principalmente à região da Ásia-Pacífico, com foco especial nas necessidades do Japão de informações de posicionamento precisas e confiáveis. O primeiro satélite foi lançado em 11 de setembro de 2010 e entrou em operação em 2018.
RTK
A cinemática em tempo real (Real-Time Kinematic - RTK) é uma das técnicas utilizadas para melhorar a exatidão dos dados obtidos dos satélites pelo receptor. Para o RTK são necessários dois receptores: a base e um rover.
RTKCONV
O RTKCONV é uma ferramenta no RTKLIB que converte dados brutos UBX ou dados de correção de base RTCM3 de um receptor para o formato RINEX.
RTKLIB
O RTKLIB é um pacote de programas de código aberto para posicionamento padrão e preciso com GNSS. É utilizado para o processamento de dados PPK. Funciona com sinais de GPS, GLONASS, Galileo, QZSS, BeiDou e SBAS.
RTKPLOT
O RINEX é um formato normalizado de dados brutos que permite armazenar observações de satélite e medições de dados de navegação realizadas pelo receptor. Permite também o pós-processamento dos dados recebidos por várias aplicações de diferentes fabricantes de receptores e programas.
RTKPOST
RTKPOST é uma ferramenta para pós-processamento de logs brutos no RTKLIB. O resultado é armazenado no arquivo de solução de posição em LLH WGS 84 - arquivo POS.
Porta serial (UART, USB, RS-232)
Uma interface de comunicação serial em que a informação é transferida sequencialmente, para dentro ou para fora, um bit de cada vez. Esse tipo de comunicação pode ser realizado através de vários dispositivos como UART, USB ou RS-232.
Relação sinal-ruído
O RTCM3 é um formato padrão da indústria para a saída de correção.
Relatório de sistema simples
Um relatório de sistema simples é uma ferramenta utilizada para facilitar os relatórios de problemas. Fornece informações sobre a versão do Emlid Flow, as configurações e a rede num formato de texto simples. A base envia correções para o rover em movimento durante a coleta de dados.
Receptor monobanda
O RTKCONV é uma ferramenta no RTKLIB que converte dados brutos UBX ou dados de correção de base RTCM3 de um receptor para o formato RINEX.
Máscara SNR
A máscara de relação sinal-ruído (Signal-to-Noise ratio) ou máscara SNR é uma ferramenta que filtra os satélites utilizados para a solução de fixação. Os satélites com baixa SNR serão excluídos do cálculo. A configuração padrão predefinida no aplicativo Emlid Flow é 35. A Emlid produz a versão da RTKLib adaptada aos produtos Reach.
Status da solução (fix, float, single)
O RTKPLOT é uma ferramenta do RTKLIB que permite visualizar e traçar as soluções de posição do RTKPOST, bem como os dados de observação do RTKCONV.
Posicionamento estático
SINGLE significa que o rover encontrou uma solução com base no seu próprio receptor e que não serão aplicadas correções de base. A precisão em modo standalone situa-se geralmente no nível de vários metros. Neste arquivo, obteremos uma localização do receptor com exatidão centimétrica.
TCP
Uma interface de comunicação serial em que a informação é transferida para dentro ou para fora sequencialmente, um bit de cada vez. Esse tipo de comunicação pode ser realizado através de vários dispositivos como UART, USB ou RS-232. Os receptores Reach podem utilizar uma porta serial para trocar dados de posição e de correção com dispositivos de terceiros.
Marca de tempo
A relação sinal-ruído ou SNR é o principal indicador da qualidade da recepção. O valor é igual à razão da potência do sinal útil em relação à potência do ruído. Você pode encontrar o indicador SNR na tela principal do aplicativo Emlid Flow. Quando a SNR de um satélite for superior a 45, este será marcado em verde. As barras cinzentas indicam a SNR da estação de base. Quanto mais satélites estiverem numa zona verde, mais precisas serão as suas medições e mais rápida será a resolução da ambiguidade.
UBX
O posicionamento estático é um dos modos de posicionamento. Assume que o rover Reach está estático.
Taxa de atualização
O protocolo de controle de transmissão (Transmission Control Protocol - TCP) é um dos principais protocolos de transferência de dados da Internet criado para controlar a transferência de dados. O cenário típico de utilização do TCP é o envio de dados de correção para um aplicativo na mesma rede ou para um servidor com IP p�úblico. O receptor monobanda tem uma linha de base mais curta em comparação com o receptor multibanda e poderá nem sequer encontrar uma solução fixa em condições de céu bloqueado.
Distância de declividade
A distância de declividade do ponto A ao ponto B é o comprimento da linha reta AB, medida ao longo do declive, levando em conta a diferença de altura entre os pontos.
Perímetro de declividade
O perímetro de declividade de um objeto fechado é a soma das distâncias de declividade de seus lados levando em consideração a diferença de altura.
VRS
A função de marca de tempo verifica o momento exato em que a câmera tira uma fotografia. Após o voo, você pode processar os logs brutos da base e de um rover para obter um arquivo "*_events.pos". Este arquivo inclui informações sobre a hora e as coordenadas de cada fotografia.
WGS 84
UBX é o formato de dados brutos GNSS. O protocolo UBX é um protocolo binário de propriedade da u-blox que produz resultados em formato hexadecimal.
A taxa de atualização é um valor que indica a frequência com que o receptor calcula e comunica a sua posição. Para os receptores Reach, recomendamos uma taxa de atualização de 1 Hz na base e de 5 Hz no rover.
FLOAT significa que o rover recebe correções da base, mas não consegue resolver todas as ambiguidades e, neste caso, a precisão geralmente fica em nível submétrico.
FIX significa que o rover, utilizando as correções da base, resolveu as ambiguidades no seu cálculo posicional e obteve a solução com uma precisão de centímetros.
XYZ
Um dos formatos para a transmissão de posição disponível para dispositivos Reach. Protocolo de texto simples para as coordenadas X, Y, Z da ECEF, bem como para o status da solução. Você pode atribuir ao seu Reach um endereço IP estático ao conectá-lo a uma nova rede Wi-Fi no aplicativo Emlid Flow ou no Reach Panel.
Posicionamento estático
O posicionamento estático é um dos modos de posicionamento. Assume que o rover Reach está estático. A restrição do sistema ajuda a resolver ambiguidades mais rapidamente, bem como a produzir medições com maior precisão.
TCP
O protocolo de controle de transmissão (Transmission Control Protocol - TCP) é um dos principais protocolos de transferência de dados da Internet criado para controlar a transferência de dados. O cenário típico de utilização do TCP é o envio de dados de correção para um aplicativo na mesma rede ou para um servidor com IP público.
Marca de tempo
A função de marca de tempo verifica o momento exato em que a câmera tira uma fotografia. Após o voo, pode processar os registos brutos da base e de um rover para obter um ficheiro "*_events.pos". Este arquivo inclui informações sobre a hora e as coordenadas de cada fotografia. Pode utilizar software de marcação geográfica para escrever esta informação nos dados EXIF das fotografias.
Azimute norte verdadeiro
O azimute norte verdadeiro é o ângulo que varia de 0 a 360 graus, medido no sentido horário, entre o norte verdadeiro e a direção de um ponto de interesse.
UBX
UBX é o formato de dados brutos GNSS. O protocolo UBX é um protocolo binário de propriedade da u-blox que produz resultados em formato hexadecimal.
Taxa de atualização
A taxa de atualização é um valor que indica a frequência com que o receptor calcula e comunica a sua posição. Para os receptores Reach, recomendamos uma taxa de atualização de 1 Hz na base e de 5 Hz no rover.
VRS
A Estação de Referência Virtual ou VRS é uma ferramenta útil para linhas de base longas. É uma estação de referência imaginária e desocupada gerada nas proximidades do usuário RTK. O rover envia os dados de volta para o NTRIP caster. O NTRIP permite unir os dados do seu rover e os dados das densas bases NTRIP para assim modelar uma base virtual próxima a você.
WGS 84
O Sistema Geodésico Mundial 1984 ou WGS 84 é o sistema global de parâmetros geodésicos da Terra, que inclui o sistema de coordenadas geocêntricas. Foi aceito em 1984 e define coordenadas relativas ao centro de massa da Terra, com um erro inferior a 2 cm.
XYZ
O Galileo é um sistema europeu de navegação por satélite. Protocolo de texto simples para as coordenadas X, Y, Z da ECEF, bem como para o status da solução.