Glossar
2D-Gitterabstand
2D-Gitterabstand zwischen den Punkten A und B ist die Länge der Geraden AB auf einer ebenen Fläche.
2D-Bodenabstand
Der 2D-Bodenabstand zwischen den Punkten A und B ist die Länge der kürzesten Linie AB auf der Oberfläche des Ellipsoids.
Alter des Differentials
Der 2D-Perimeter eines eingeschlossenen Objekts ist die Summe der 2D-Abstände seiner Seiten ohne Berücksichtigung der Höhendifferenz.
Absolute Positionierung
Die absolute Positionierung zeigt Ihre tatsächlichen globalen Koordinaten relativ zur Erdoberfläche an. Die absolute Positionierung ist der Schlüssel zu RTK-Vermessungen, bei denen Sie absolute geografische Genauigkeit benötigen (z. B. Kartierung, Vermessung der Grundstücksgrenzen usw.). In diesem Fall ist die absolute Basisposition entscheidend für eine hohe Genauigkeit der Ergebnisse.
Genauigkeit
Die Genauigkeit ist die Annäherung der Messungen an einen bestimmten Wert. In der Vermessung bezieht sich die Genauigkeit darauf, ob die von Ihnen erfassten Koordinaten im Verhältnis zu den globalen Koordinaten richtig sind. Nicht zu verwechseln mit Präzision.
Alter des Differentials
Das Alter des Differentials ist das Maß dafür, wie alt die Korrekturen sind, die Ihr Empfänger erhält. Es wird berechnet, indem die Zeit, zu der die Korrekturmeldung erzeugt wurde, von der aktuellen Empfängerzeit abgezogen wird. Das Standard-Differential-Alter für RTK beträgt in der Regel 1-2 Sekunden.
Phasenzentrum der Antenne
Das Phasenzentrum der Antenne kann als Strahlungsquelle der Antenne bezeichnet werden. Alle GNSS-Messungen beziehen sich auf das Phasenzentrum. Das Phasenzentrum entspricht nicht dem physikalischen Zentrum der Antenne und seine tatsächliche Position hängt von der Richtung des ankommenden Funksignals ab. Darüber hinaus hat jedes Band sein eigenes Phasenzentrum.
Antennenreferenzpunkt
Der Antennenreferenzpunkt ist der mittlere Punkt auf der Unterseite des Empfängers. Er wird für die Berechnung der Antennenhöhe verwendet.
Bereich
Die Fläche eines Objekts ist der gesamte Raum, der von seiner Form auf einer ebenen Fläche eingeschlossen wird.
AR-Verhältnis
Dies ist das Ergebnis des Ratio-Tests, der für die potenzielle “Fix”-Lösung durchgeführt wurde. Es zeigt, wie oft die beste Lösung besser ist als die nächste. Wenn diese Zahl größer als 3 ist, betrachtet Reach die RTK-Lösung als Fixed-Lösung (Zentimetergenauigkeit).
Dieser Parameter gilt nur für Reach-Einzelband-Geräte (Reach RS/RS+, Reach Modul/M+).
Basis
Die Basis ist einer der Empfänger, die in RTK- oder PPK-Szenarien als Referenzstation dienen. Es handelt sich um eine statische Einheit mit den ermittelten Koordinaten, die Korrekturen an die bewegliche Einheit oder den Rover sendet. Wird die Basis über den bekannten Punkt gesetzt, ist absolute Genauigkeit gewährleistet.
Basiskorrekturprotokoll
Dieses Protokoll enthält die Korrekturen der Basisstation im RTCM3-Format.
Basislinie
Die Basislinie ist der Abstand zwischen einem Rover und einer Basis. Wenn die Basislinie größer als empfohlen ist, wird die Lösung weniger genau, die Fixzeit wird länger oder sie wird überhaupt nicht berechnet.
Ausgabe der Basis
BeiDou ist ein chinesisches Navigationssystem. Damals, im Jahr 2000, deckte BeiDou-1 nur China ab. In der Emlid Flow-App können Sie auf dem Bildschirm Basisausgabe einstellen, wie Ihre Basis-Korrekturen auf die folgenden Arten sendet: Seriell, TCP, Ntrip, Bluetooth oder LoRa. Seit 2015 bietet BeiDou eine globale Abdeckung.
Client-Modus
BeiDou ist ein chinesisches Navigationssystem. Damals, im Jahr 2000, deckte BeiDou-1 nur China ab. Im Jahr 2012 begann BeiDou-2 mit der Abdeckung des asiatisch-pazifischen Raums. Seit 2015 bietet BeiDou eine globale Abdeckung. Wir empfehlen die Verwendung dieses Systems, wenn Sie im asiatisch-pazifischen Raum ansässig sind.
Beta-Updates
Beta-Updates sind Vorabversionen von Software, die für Tests und Feedback verwendet werden. In diesem Fall werden Mehrdeutigkeiten Epoche für Epoche aufgelöst.
Koordinatensystem
Der Client-Modus bedeutet, dass der Reach mit einem externen WLAN-Netzwerk verbunden ist.
Korrektureingabe
Dies ist der Teil der Rover-Einstellungen, der für die Annahme der Korrekturen verantwortlich ist. In diesem Fall werden Mehrdeutigkeiten Epoche für Epoche aufgelöst. Weniger stabil als Fix-and-Hold, aber kein Risiko, einen falschen Fix zu halten.
Korrekturen
Bei den Korrekturen handelt es sich um die Daten, die verwendet werden, um ionosphärische und troposphärische Verzögerungen sowie Satellitenuhrfehler zu eliminieren. Im RTK-Szenario überträgt die stationäre Basis Korrekturen an den sich bewegenden Rover.
Korrektureingabe
Das Netz der kontinuierlich arbeitenden Referenzstationen (Continuously Operating Reference Stations, CORS) besteht aus statischen Stationen, die genaue GNSS-Daten (Trägerphase, Codebereich usw.) und auch Korrekturen liefern. Mit der Konfiguration des Korrektureingangs in der Emlid Flow App können Sie wählen, wie Ihr Rover die Korrekturen empfängt: über Seriell, TCP, Ntrip, Bluetooth oder LoRa. Reach-Empfänger unterstützen den Korrektureingang im Format RTCM3.
Korrekturen
Verdünnung der Präzision oder DOP (Dilution of Precision) ist der Begriff, der zur Bewertung der geometrischen Position der Satelliten relativ zum Empfänger verwendet wird. Wenn die Satelliten im Sichtfeld zu nahe beieinander liegen, bedeutet dies, dass die Satellitengeometrie schwach ist (ein hoher DOP-Wert).
Höhenmaske
Die Höhenmaske kann in den RTK-Einstellungen in der Emlid Flow App konfiguriert werden. Satelliten, die niedriger als die eingestellte Elevation sind, werden von der Berechnung ausgeschlossen.
Delta E/N
Delta E/N zwischen den Punkten A und B ist die Differenz ihrer Koordinaten entlang der entsprechenden Ost- und Nordachse.
ENU
Eines der für Reach-Geräte verfügbaren Formate für das Positionsstreaming. Einfaches Textprotokoll für die Ost-, Nord- und UP-Komponenten der Basislinie sowie den Lösungsstatus. Wenn der Abstand zwischen den Satelliten ausreichend ist und sie gleichmäßig verteilt sind und einen größeren Raum abdecken, wird die Geometrie als stark angesehen, weshalb der DOP-Wert niedrig ist. Je niedriger der DOP-Wert ist, desto genauer sind Ihre Daten. Als guter DOP-Wert gilt ein Wert von unter 2.
Richtung (Azimut)
Die Richtung (Azimut) einer Linie AB oder von Punkt A nach B ist ein horizontaler Winkel in Grad, gemessen am Punkt A im Uhrzeigersinn zwischen der Richtung nach Norden und der Richtung nach Punkt B.
ERB
Eines der für Reach-Geräte verfügbaren Formate für das Positionsstreaming. Wird für die Kommunikation mit ArduPilot verwendet.
Höhenmaske
Die Höhenmaske kann in den RTK-Einstellungen in der Emlid Flow App konfiguriert werden. Nach dem ersten Fix der Mehrdeutigkeit hält sie (die Strategie/der Algorithmus) die anderen Mehrdeutigkeiten in Schach. Fix ist stabiler, aber wenn die erste Initialisierung nicht korrekt war, dauert es länger, bis es wiederhergestellt und korrekt initialisiert ist. In der Regel liefern Satelliten mit einer niedrigeren Elevation zu verrauschte Messungen, da das Signal die meiste Atmosphäre durchläuft.
Emlid Flow
Emlid Flow ist die von Emlid entwickelte Mobilanwendung. Es dient der Steuerung und Konfiguration der Reach-Empfänger, der Erstellung von Projekten, dem Erfassen von Punkten usw.
Galileo
Galileo ist ein europäisches Satellitennavigationssystem. Es wurde 2011 in Betrieb genommen und deckt inzwischen die ganze Welt ab.
Bodenkontrollpunkt oder GCP
Galileo ist ein europäisches Satellitennavigationssystem. Die GCPs werden aktiv in der Luftbildvermessung und Photogrammetrie eingesetzt. ERB steht für Emlid Reach Binary Protokoll.
GIS
Der externe untere Anschluss ist ein 9-poliger Anschluss, der sich an der Unterseite von Reach RS/RS+, RS2/RS2+ und RS3 befindet. Es dient zur konstanten Stromversorgung über eine externe Batterie, zum Aufbau der RTK-Kommunikation mit Geräten von Drittanbietern und zum Streamen der Reach-Position an andere Geräte oder Apps von Drittanbietern. Es verwendet das serielle Kommunikationsprotokoll RS-232.
Fix-and-Hold
Fix-and-Hold ist eine Strategie zur Lösung der Mehrdeutigkeiten bei RTK und PPK. Nach dem ersten Fix der Mehrdeutigkeit hält sie (die Strategie/der Algorithmus) die anderen Mehrdeutigkeiten in Schach. Fix ist stabiler, aber wenn die erste Initialisierung nicht korrekt war, dauert es länger, bis es wiederhergestellt und korrekt initialisiert ist. Man kann sich das so vorstellen, als hätte Fix eine Trägheit.
Vollständiger Systembericht
Ein vollständiger Systembericht ist ein Hilfsmittel zur Erstellung von Problemberichten. Er wird als ZIP-Archiv bereitgestellt und enthält Systemprotokolle und technische Details Ihres Geräts sowie einige sensible Informationen wie Ihre Ntrip-Anmeldedaten oder Netzwerkpasswörter. Deshalb raten wir davon ab, den Bericht zu veröffentlichen. Diese werden verwendet, um komplizierte Fälle im Support zu debuggen.
GNSS
Galileo ist ein europäisches Satellitennavigationssystem. Es wurde erst 2011 in Betrieb genommen und deckt nun die ganze Welt ab.
Globales Datum
Das globale Datum ist ein ellipsoidisches Koordinatenreferenzsystem, das vom Empfänger zur Messung von Koordinaten verwendet wird, bevor Transformationen vorgenommen werden.
Steigung
Die Steigung einer Linie ist das Maß für ihre Steilheit, wobei größere Werte für steilere Steigungen stehen und 0 % eine horizontale Linie anzeigt.
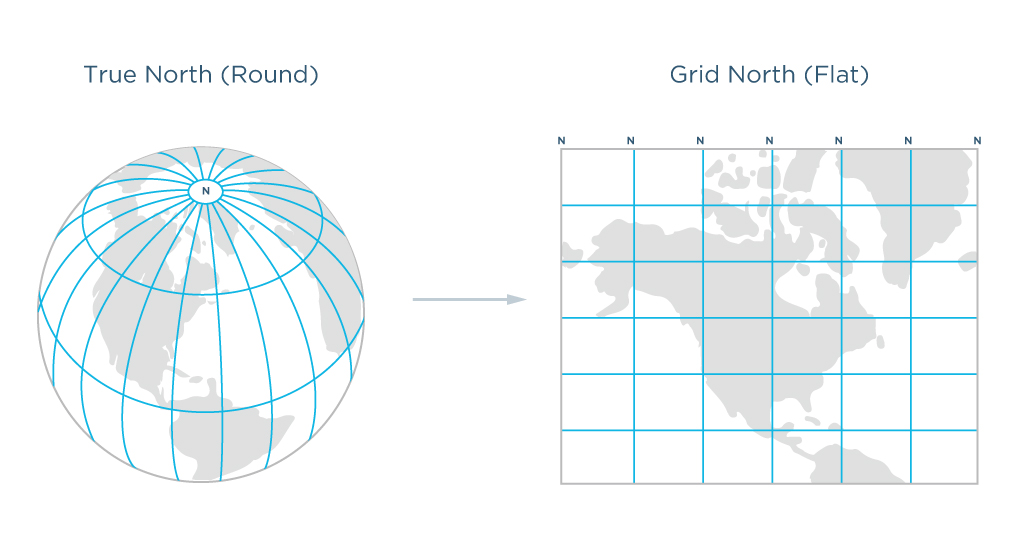
Gitternord-Azimut
Der Gitternord-Azimut ist der im Uhrzeigersinn gemessene Winkel zwischen einer zum Zentralmeridian parallelen Linie und der Richtung zu einem Punkt von Interesse (eine gerade Linie zwischen zwei Punkten auf der Projektionsebene).
Gitterabstand
Der Gitterabstand ist der auf der ebenen Projektionsfläche gemessene Abstand.
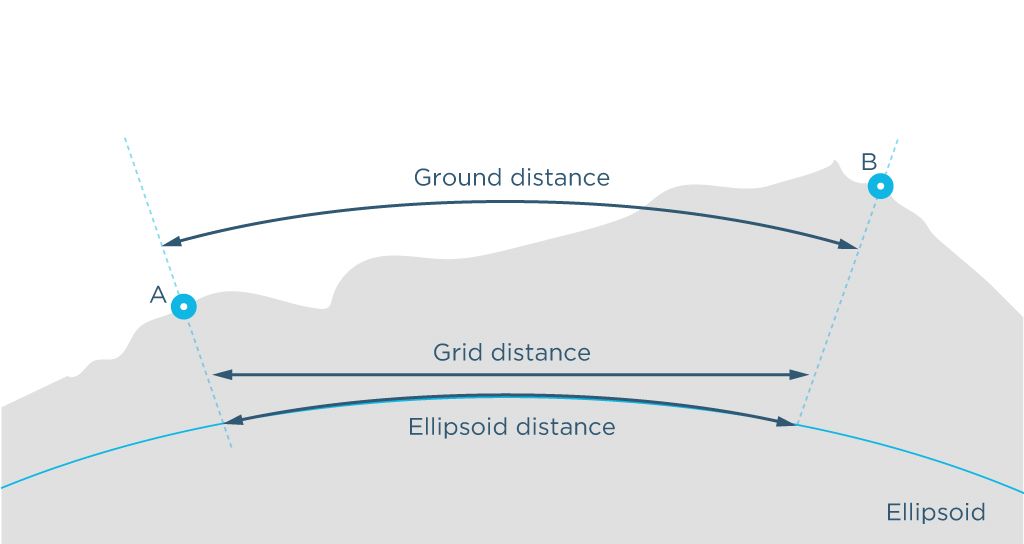
Bodenabstand
Die Bodenentfernung ist die auf der tatsächlichen Erdoberfläche gemessene Entfernung, wobei die mittlere Höhe der gemessenen Punkte berücksichtigt wird.
GPS
Ein Bodenkontrollpunkt ist ein Punkt auf einer Fläche mit bekannten Koordinaten. Die GCPs werden aktiv in der Luftbildmessung und Photogrammetrie eingesetzt. Die Vermesser setzen GCPs über dem Bereich und markieren sie so, dass sie von der Drohne aus sichtbar sind. Die GCPs werden dann vermessen, um ihre genauen Koordinaten zu ermitteln und als Referenzpunkte für die weitere Datenverarbeitung zu verwenden.
GIS
Ein Geoinformationssystem (GIS) ist ein System zur Erfassung, Speicherung, Analyse und grafischen Darstellung von räumlichen Daten und damit verbundenen Informationen über bestimmte Objekte.
GLONASS
GLONASS ist ein globales Satellitennavigationssystem. Das System wurde 1978 entwickelt und wird von den Vereinigten Staaten betrieben.
GLONASS AR-Modus
Ein Verarbeitungsparameter, mit dem die Mehrdeutigkeitsauflösung für das GLONASS-Signal separat ein- und ausgeschaltet werden kann. Im Gegensatz zu GPS senden alle GLONASS-Satelliten auf unterschiedlichen Frequenzen, was zu Inter Channel Biases (ICB) führt, die für jedes Empfängermodell einzigartig sind.
Reach-Geräte können GLONASS-ICBs korrigieren, so dass GLONASS AR mit Nicht-Reach-Basen wie Ntrip-Caster möglich ist. Generell wird empfohlen, GLONASS AR immer auf „Ein” zu stellen.
Dieser Parameter gilt nur für Reach-Einzelband-Geräte (Reach RS/RS+, Reach Modul/M+).
Kinematische Positionierung
Das globale Navigationssatellitensystem (GNSS) ist ein System zur Bestimmung des Standorts (geografische Koordinaten) von Land-, Wasser- und Luftobjekten. Solche Systeme bestehen aus Weltraumausrüstung, einem Bodensegment, dem sogenannten Kontrollsystem, und einzelnen Empfängern. Die Funktionsweise von GNSS basiert auf der Messung der Entfernung zwischen der Antenne am Objekt (Empfänger) und den Satelliten, deren Position mit großer Genauigkeit bekannt ist.
LLH
Eines der f�ür Reach-Geräte verfügbaren Formate für das Positionsstreaming. Einfaches Textprotokoll für Breitengrad, Längengrad und Höhe sowie den Lösungsstatus.
LoRa-Funkgerät
Long Range oder das LoRa-Funkgerät wird für Reach-Empfänger verwendet, um Korrekturen ohne Internetverbindung zu senden oder zu empfangen. Reach RS2/RS2+/RS+ ist mit einem internen LoRa-Funkgerät ausgestattet. Es wird empfohlen, eine Massefläche von mindestens 70x70 mm zu verwenden.
Mock Location
Mit der Mock Location-Funktion zum Vortäuschen des Standorts von Android-Geräten können Sie den Standort Ihres Geräts manuell zu einem beliebigen anderen Ort ändern. Im Falle von Reach-Geräten können die GPS Collector-Apps die GPS-Beobachtungen direkt vom Empfänger abrufen und nicht vom internen GPS des Geräts.
Hotspot-Modus
Der Hotspot-Modus bedeutet, dass der Reach sein eigenes WLAN-Netzwerk ausstrahlt.
Multiband-Empfänger
Ein Multiband-Empfänger ist ein Empfänger, der Signale vom Satelliten auf mehr als einem Frequenzband empfangen kann. Das bedeutet, dass der Empfänger weniger Zeit benötigt, um die erste Fixed-Lösung zu ermitteln, eine längere Basislinie hat und mehr Chancen hat, die Fixed-Lösung auch bei nicht vorhandener freier Sicht zum Himmel aufrechtzuerhalten.
Mehrwegeeffekt
Galileo ist ein europäisches Satellitennavigationssystem. Der Mehrwegeffekt führt zu einem Fehler in der Pseudo-Entfernungsmessung und beeinträchtigt somit die Positionsgenauigkeit.
Nachtmodus
Die Lokalisierung in der GNSS-Vermessung ist eine Funktion zur Berechnung der Parameter des lokalen Koordinatensystems oder zur Anpassung des bestehenden Systems an die Kontrollpunkte im Vermessungsbereich.
LoRa-Funk
Long Range oder das LoRa-Funkgerät wird für Reach-Empfänger verwendet, um Korrekturen ohne Internetverbindung zu senden oder zu empfangen. Reach RS3/RS2/RS2+/RS+ ist mit einem internen Lora-Funkgerät ausgestattet. Der Reach M2/M+ verfügt über ein externes LoRa-Funkgerät: Sie können es über den S2-Port anschließen. Das Radio funktioniert nur auf eine Weise: Es sendet entweder Korrekturen oder empfängt sie. Mit der LoRa-Modulation ist es möglich, bis zu 19 km (11,8 mi) in Sichtweite zu arbeiten.
Virtueller Standort
Mit der Virtueller-Standort-Funktion zum Vortäuschen des Standorts von Android-Geräten können Sie den Standort Ihres Geräts manuell zu einem beliebigen anderen Ort ändern. Im Falle von Reach-Geräten können die GPS Collector-Apps die GPS-Beobachtungen direkt vom Empfänger abrufen und nicht vom internen GPS des Geräts.
Punktwolke
Eine Punktwolke ist eine Menge von Eckpunkten in einem dreidimensionalen Koordinatensystem. Punktwolken werden mit 3D-Scannern erstellt und in der Photogrammetrie und 3D-Modellierung verwendet.
Punktesammlung
Die Punktsammlung ist eine Funktion in der Emlid Flow App, mit der Sie die genauen Koordinaten des Punktes finden können. Der Empfänger ermittelt die Koordinaten (x, y, z) eines Bodenpunktes und speichert sie in Ihrem Projekt zur weiteren Verarbeitung.
Mehrwegeeffekt
Der Mehrwegeeffekt ist ein Effekt, der auftritt, wenn das GPS-Signal von Hindernissen abgelenkt wird, so dass der GNSS-Empfänger nicht nur Signale direkt von den Satelliten, sondern auch von lokalen Objekten empfängt. Der Mehrwegeffekt führt zu einem Fehler in der Messung der Pseudostrecke und beeinträchtigt somit die Positionsgenauigkeit.
Stabhöhe
Im Nachtmodus können Sie die LEDs bis zum nächsten Neustart des Reach-Geräts ausschalten.
Positionsprotokoll
Dieses Protokoll enthält Positionsdaten. Reach-Geräte können ihre Position in den Formaten LLH, XYZ, ENU, NMEA und ERB aufzeichnen. Unterstützte Nachrichten: GNRMC, GNGGA, GNVTG, GNGST, GNZDA, GNEBP, GPRMC, GPGSA, GPGGA, GPGSV, GPVTG, GPGST, GPZDA, GPEBP, GLGSA, GLGSV, GAGSA, GAGSV, GBGSA, GBGSV.
Ntrip
Das Ntrip-Netz (Networked Transport of RTCM via Internet Protocol) ist eine alternative Quelle für Korrekturen. Ntrip ermöglicht es Ihrem Rover, Korrekturen über das Internet anzunehmen, ohne dass ein zweiter lokaler Empfänger als Basis benötigt wird. Eine Referenzstation erfasst Daten und sendet sie an den Ntrip-Caster, der sie über den Internet-Port an den über einen bestimmten Port angeschlossenen und autorisierten Client-Rover weiterleitet.
Punktwolke
Die kinematische Nachbearbeitung ist eine der Techniken, die für hochgenaue Vermessungen eingesetzt werden. Wie bei RTK benötigt man zwei Einheiten: Basis und Rover.
PPP
Die Präzise Punktpositionierung oder PPP ist eine Technik zur Bestimmung der zentimetergenauen Koordinaten eines Punktes. Der Empfänger, der über einem Punkt angebracht ist, zeichnet Daten f�ür einen bestimmten Zeitraum auf.
Präzision
Die Punktabsteckung ist eine Funktion in der Emlid Flow App, die es ermöglicht, Punkte mit bekannten Koordinaten am Standort zu finden.
Rohdatenprotokoll
Ein Rohrdatenprotokoll enthält GNSS-Beobachtungen des Empfängers ohne Berechnung der genauen Koordinaten. Es kann im UBX-Format oder direkt im branchenüblichen RINEX-Format aufgezeichnet werden.
Emlid Flow
Emlid Flow ist die von Emlid entwickelte Mobilanwendung. Reach-Geräte können ihre Position in den Formaten LLH, XYZ, ENU, NMEA und ERB aufzeichnen.
Positionsstreaming
Die relative Positionierung zeigt Ihre Koordinaten relativ zu einem anderen Referenzobjekt an. Die Position kann über Seriell, TCP und Bluetooth weitergegeben werden. Verschiedene Anwendungen erfordern unterschiedliche Formate der Positionsdaten, deshalb gibt Reach seine Position in LLH, XYZ, ENU, NMEA und ERB aus.
PPK
RINEX ist ein Standard-Rohdatenformat, das die Speicherung von Satellitenbeobachtungen und Navigationsdatenmessungen durch den Empfänger ermöglicht. Wie bei RTK benötigt man zwei Einheiten: eine Basis und einen Rover. Der Hauptunterschied besteht darin, dass im PPK-Szenario keine Echtzeitverbindung zwischen zwei Einheiten erforderlich ist. Basis und Rover zeichnen die Protokolle getrennt auf, und diese Protokolle werden später mit einer speziellen Nachverarbeitungssoftware, z. B. RTKLib, zusammen verarbeitet.
RMS
Die Quadratwurzel aus dem Durchschnitt des quadratischen Fehlers. Die RMS-Berechnungen werden zur Bewertung der Genauigkeit der Positionsmessung verwendet. Eine horizontale oder vertikale Verdünnung der Präzision, multipliziert mit drei RMS, könnte den horizontalen bzw. vertikalen Genauigkeitswert ergeben.
Präzision
Der Rover ist einer der beiden GNSS-Empfänger, die für die Datenerfassung in RTK- oder PPK-Szenarien verwendet werden. Der Rover ist eine bewegliche Einheit: Der Vermesser benutzt den Rover zur Aufzeichnung der Punkte, während der Rover die Korrekturen von der statischen Basis erhält. In diesem Fall benötigen Sie keine exakten Georeferenzierungskoordinaten der Punkte, Sie müssen nur wissen, dass die erfassten Punkte z. B. im gleichen Abstand zueinander liegen. Nicht zu verwechseln mit Genauigkeit.
RTCM3
QZSS steht für Quasi-Zenith Satellite System – das japanische Satellitensystem. Es bedient in erster Linie den asiatisch-pazifischen Raum, wobei der Schwerpunkt auf dem Bedarf Japans an präzisen und zuverlässigen Positionsdaten liegt. Der erste Satellit wurde am 11. September 2010 gestartet und ist seit 2018 in Betrieb.
Rohdatenprotokoll
Ein Rohrdatenprotokoll enthält GNSS-Beobachtungen des Empfängers ohne Berechnung der genauen Koordinaten. Für RTK benötigt man zwei Empfänger: Basis und Rover.
RTKCONV
RTKCONV ist ein Werkzeug in der RTKLIB, das UBX-Rohdaten oder RTCM3-Basiskorrekturdaten von einem Empfänger in das Format RINEX konvertiert.
RTKLIB
RTKLIB ist ein Open-Source-Programmpaket für die standardisierte und präzise Positionierung mit GNSS. Es wird für die PPK-Datenverarbeitung verwendet. Anhand dieser Informationen bestimmt der Rover seine Position relativ zur Basis mit Zentimetergenauigkeit.
RTKPLOT
RINEX ist ein Standard-Rohdatenformat, das die Speicherung von Satellitenbeobachtungen und Navigationsdatenmessungen durch den Empfänger ermöglicht. Es ermöglicht auch die Nachbearbeitung der empfangenen Daten durch verschiedene Anwendungen von unterschiedlichen Herstellern von Empfängern und Programmen.
RTKPOST
RTKPOST ist ein Werkzeug zur Nachbearbeitung von Rohprotokollen in der RTKLIB. Das Ergebnis wird in der Positionslösungsdatei in LLH WGS 84 - POS-Datei gespeichert.
Serielle Schnittstelle (UART, USB, RS-232)
Eine serielle Kommunikationsschnittstelle, bei der die Informationen sequentiell Bit für Bit ein- oder ausgegeben werden. Der Rover ist eine bewegliche Einheit: Der Vermesser benutzt den Rover zur Aufnahme der Punkte, während der Rover die Korrekturen von der statischen Basis erhält.
Signal-Rausch-Verhältnis
RTCM3 ist ein Industriestandardformat für die Korrekturausgabe.
Einfacher Systembericht
Ein einfacher Systembericht ist ein Hilfsmittel zur Erstellung von Ausgabeberichten. Für RTK benötigt man zwei Empfänger: eine Basis und einen Rover. Die Basis sendet während der Datenerfassung Korrekturen an den sich bewegenden Rover.
Einzelband-Empfänger
RTKCONV ist ein Werkzeug in der RTKLIB, das UBX-Rohdaten oder RTCM3-Basiskorrekturdaten von einem Empfänger in das RINEX-Format konvertiert.
SNR-Maske
Die Maske des Signal-Rausch-Verhältnisses oder SNR-Maske ist ein Werkzeug, das die für die Fixed-Lösung verwendeten Satelliten filtert. Es wird für die PPK-Datenverarbeitung verwendet. Die Standardeinstellung in der Emlid Flow App ist 35. Emlid produziert die für Reach-Produkte maßgeschneiderte Version von RTKLib.
Lösungsstatus (Fix, Float, Single)
RTKPLOT ist ein Werkzeug im RTKLIB, mit dem die Positionslösungen von RTKPOST sowie die Beobachtungsdaten von RTKCONV angezeigt und gezeichnet werden können.
Statische Positionierung
SINGLE bedeutet, dass der Rover eine Lösung gefunden hat, die sich auf seinen eigenen Empfänger stützt, und dass keine Basiskorrekturen angewendet werden. Die Präzision im Standalone-Modus liegt in der Regel im Bereich von mehreren Metern. In dieser Datei erhalten wir eine zentimetergenaue Spur des Empfängers.
TCP
Eine serielle Kommunikationsschnittstelle, bei der die Informationen sequentiell Bit für Bit ein- oder ausgegeben werden. Diese Art der Kommunikation kann über verschiedene Geräte wie UART, USB oder RS-232 realisiert werden. Reach-Empfänger können über eine serielle Schnittstelle die Positions- und Korrekturdaten mit Geräten anderer Hersteller austauschen.
Zeitmarkierung
Das Signal-Rausch-Verhältnis (SNR) ist der wichtigste Indikator für die Qualität des Empfangs. Der Wert ist gleich dem Verhältnis zwischen der Leistung des Nutzsignals und der Rauschleistung. Sie finden die SNR-Anzeige auf dem Hauptbildschirm der Emlid Flow App. Wenn das SNR eines Satelliten über 45 liegt, wird er grün markiert. Graue Balken zeigen das SNR der Basisstation an. Je mehr Satelliten sich in der grünen Zone befinden, desto präziser sind Ihre Messungen und desto schneller wird die Mehrdeutigkeit aufgelöst.
UBX
Die statische Positionierung ist einer der Positionierungsmodi. Dabei wird davon ausgegangen, dass der Reach-Rover statisch ist.
Einzelband-Empfänger
Das Transmission Control Protocol (TCP) ist eines der wichtigsten Internet-Datenübertragungsprotokolle zur Steuerung der Datenübertragung. Ein typisches Szenario für die Verwendung von TCP ist das Senden von Korrekturdaten an eine Anwendung im gleichen Netz oder an einen Server mit öffentlicher IP. Einzelband-Empfänger haben im Vergleich zu Multiband-Empfängern eine kürzere Basislinie und finden möglicherweise nicht einmal eine Fix--Lösung, wenn keine freie Sicht zum Himmel vorhanden ist.
Neigungsabstand
Der Neigungsabstand von Punkt A nach Punkt B ist die Länge der Geraden AB, gemessen entlang des Hanges, unter Berücksichtigung der Höhendifferenz zwischen den Punkten.
Perimeter der Böschung
Der Neigungsumfang eines geschlossenen Objekts ist die Summe der Neigungsabstände seiner Seiten unter Berücksichtigung der Höhendifferenz.
VRS
Die Zeitmarkierungsfunktion verifiziert den genauen Zeitpunkt, zu dem die Kamera ein Foto aufnimmt. Satelliten mit niedrigem SNR werden von der Berechnung ausgeschlossen. Diese Datei enthält Informationen über die Zeit und die Koordinaten der einzelnen Fotos.
WGS 84
UBX ist das GNSS-Rohdatenformat. Das UBX-Protokoll ist ein proprietäres Binärprotokoll von u-blox, das im Hexadezimalformat ausgegeben wird.
SINGLE bedeutet, dass der Rover eine Lösung gefunden hat, die sich auf seinen eigenen Empfänger stützt, und dass keine Basiskorrekturen angewendet werden. Für Reach-Empfänger empfehlen wir eine Aktualisierungsrate von 1 Hz auf der Basis und 5 Hz auf dem Rover.
FLOAT bedeutet, dass der Rover Korrekturen von der Basis erhält, aber nicht alle Mehrdeutigkeiten auflösen kann, und in diesem Fall liegt die Genauigkeit in der Regel im Submeterbereich.
FIX bedeutet, dass der Rover mit Hilfe von Korrekturen von der Basis die Mehrdeutigkeiten in seiner Positionsberechnung beseitigt und die Lösung mit Zentimetergenauigkeit erreicht hat.
XYZ
Eines der für Reach-Geräte verfügbaren Formate für das Positionsstreaming. Einfaches Textprotokoll für X-, Y- und Z-ECEF-Koordinaten sowie für den Lösungsstatus. Sie können Ihrem Reach eine statische IP-Adresse zuweisen, wenn Sie ihn über die Emlid Flow App oder das Reach Panel mit einem neuen WLAN-Netzwerk verbinden.
Statische Positionierung
Die statische Positionierung ist einer der Positionierungsmodi. Dabei wird davon ausgegangen, dass der Reach Rover statisch ist. Die Einschränkung des Systems trägt dazu bei, Mehrdeutigkeiten schneller aufzulösen und Messungen mit höherer Präzision durchzuführen.
TCP
Das Transmission Control Protocol (TCP) ist eines der wichtigsten Internet-Datenübertragungsprotokolle zur Steuerung der Datenübertragung. Ein typisches Szenario für die Verwendung von TCP ist das Senden von Korrekturdaten an eine Anwendung im gleichen Netz oder an einen Server mit öffentlicher IP.
Zeitmarkierung
Die Zeitmarkierungsfunktion verifiziert den genauen Zeitpunkt, zu dem die Kamera ein Foto aufnimmt. Nach dem Flug können Sie die Raw-Protokolle von der Basis und einem Rover verarbeiten, um eine Datei *_events.pos” zu erhalten. Diese Datei enthält Informationen über die Zeit und die Koordinaten der einzelnen Fotos. Sie können Geotagging-Software verwenden, um diese Informationen in die EXIF-Daten der Fotos zu schreiben.
Nordazimut
Der Nordazimut ist der im Uhrzeigersinn gemessene Winkel von 0 bis 360 Grad zwischen Norden und der Richtung zu einem Punkt von Interesse.
UBX
UBX ist das GNSS-Rohdatenformat. Das UBX-Protokoll ist ein proprietäres Binärprotokoll von u-blox, das im Hexadezimalformat ausgegeben wird.
Aktualisierungsrate
Die Aktualisierungsrate ist ein Wert, der angibt, wie häufig der Empfänger seine Position berechnet und meldet. Für Reach-Empfänger empfehlen wir eine Aktualisierungsrate von 1 Hz auf der Basis und 5 Hz auf dem Rover.
VRS
Die virtuelle Referenzstation (VRS) ist ein nützliches Instrument für lange Basislinien. Es handelt sich um eine imaginäre, unbesetzte Referenzstation, die in der Nähe des RTK-Nutzers generiert wird. Der Rover sendet Daten an den Ntrip-Caster zurück. Ntrip ermöglicht die Zusammenführung der Daten Ihres Rovers und der Daten von dichten Ntrip-Basen und modelliert eine virtuelle Basis neben Ihnen.
WGS 84
World Geodetic System 1984 oder WGS 84 ist das globale System der geodätischen Parameter der Erde, einschließlich des Systems der geozentrischen Koordinaten. Es wurde 1984 angenommen und definiert Koordinaten relativ zum Massenschwerpunkt der Erde mit einem Fehler von weniger als 2 cm.
XYZ
Galileo ist ein europäisches Satellitennavigationssystem. Einfaches Textprotokoll für X-, Y- und Z-ECEF-Koordinaten sowie für den Lösungsstatus.