Configuração da base e do rover
Introdução
Este tutorial mostra como configurar dois dispositivos Reach M2 ou Reach M+ como uma base e um rover com um link de correção através de Wi-Fi.
Para configurar as correções de base NTRIP, siga os passos do guia Trabalhando com o serviço NTRIP.
Mudar o nome dos dispositivos Reach
Por padrão, todo Reach tem o mesmo nome. Para distinguir entre a base e o rover no campo, é necessário mudar seus nomes. Siga os passos abaixo:
- Conecte-se ao Reach que você pretende utilizar como base.
Quando você se conectar ao seu Reach, todos os LEDs piscarão simultaneamente. Se precisar piscar os LEDs durante um levantamento, toque na célula com o nome do seu receptor na tela Receptores e tenha acesso ao botão Piscar LEDs.
-
Vá para Configurações e toque em Informações do receptor.
-
Em Nome do receptor e do hotspot, altere o nome do seu Reach para reach-base.
O nome inserido também será usado como nome de rede Wi-Fi quando o Reach estiver no modo hotspot.
-
Pressione Salvar.
-
Faça o mesmo com o segundo Reach. No entanto, use o nome reach-rover em vez de reach-base.
Configure uma estação de base
Agora você precisa definir as configurações RTK na base. Siga os passos abaixo:
-
Conecte-se à unidade base.
-
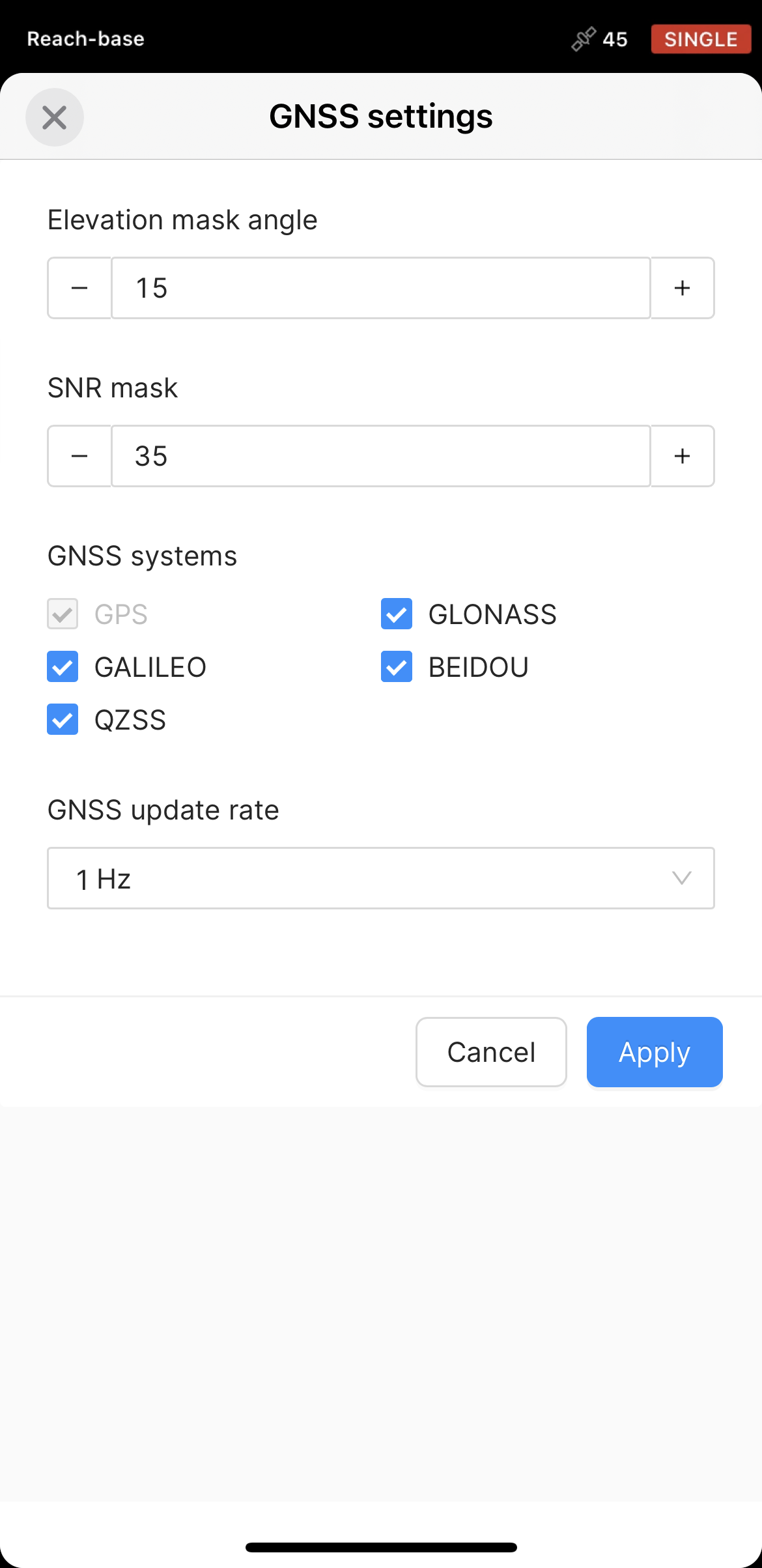
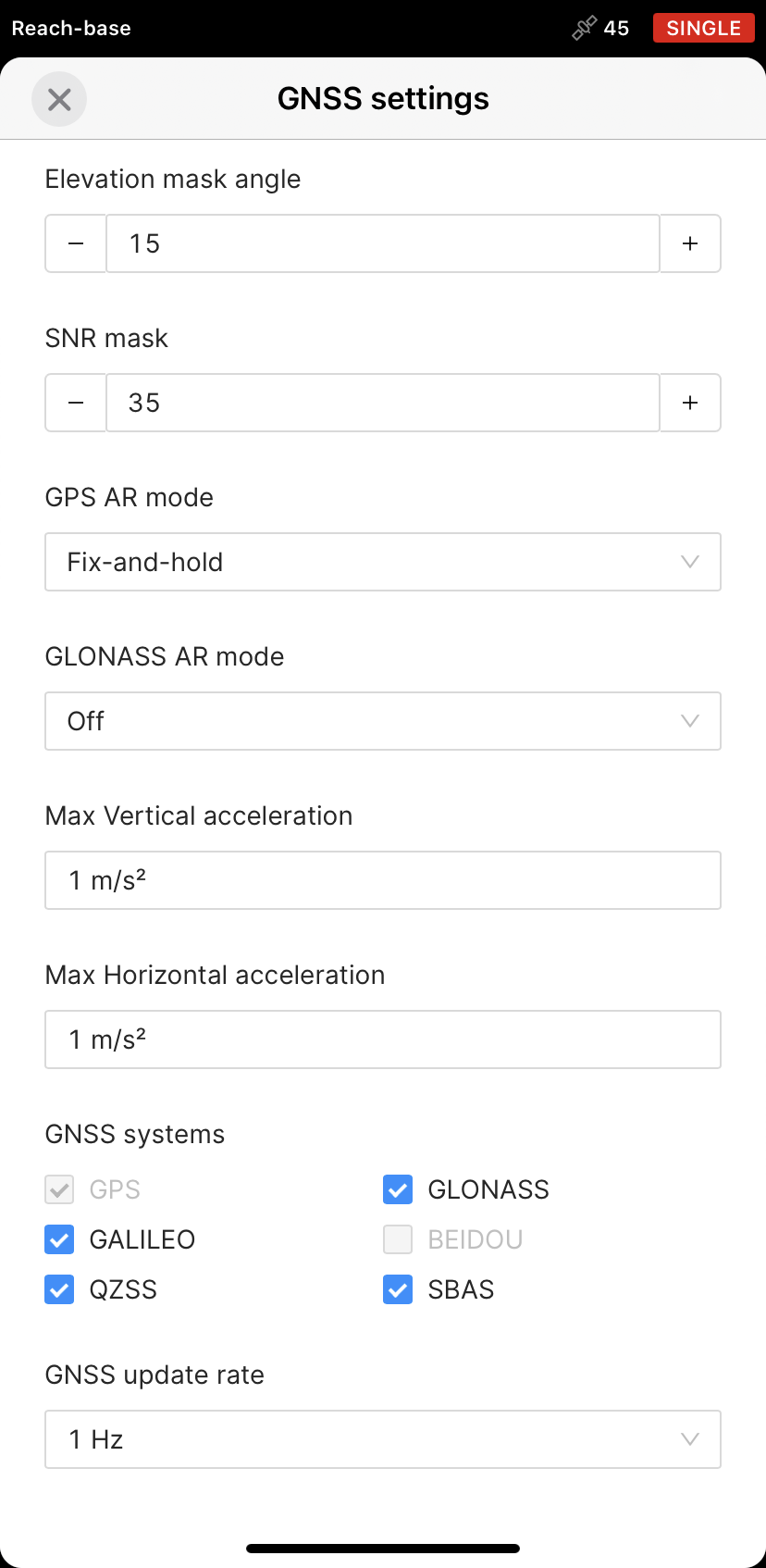
Vá para Configurações e toque em Configurações GNSS. Selecione os sistemas de satélite dependendo do dispositivo Reach utilizado:
- Reach M2
- Reach M+
Escolha cada um dos sistemas de satélite. Defina a taxa de atualização do GNSS para 1 Hz.
Escolha GLONASS ou BeiDou dependendo da sua localização. Enquanto o GLONASS cobre a maior parte do mundo, o BeiDou poderá ser mais eficiente na região Ásia-Pacífico. Selecione os sistemas de satélites restantes. Defina a taxa de atualização do GNSS em 1 Hz.
Depois de ajustar as configurações RTK, você precisa configurar a transmissão das correções RTK via TCP. Siga os passos abaixo:
-
Volte à tela Receptores e toque em Saída da base.
-
Selecione Servidor TCP.
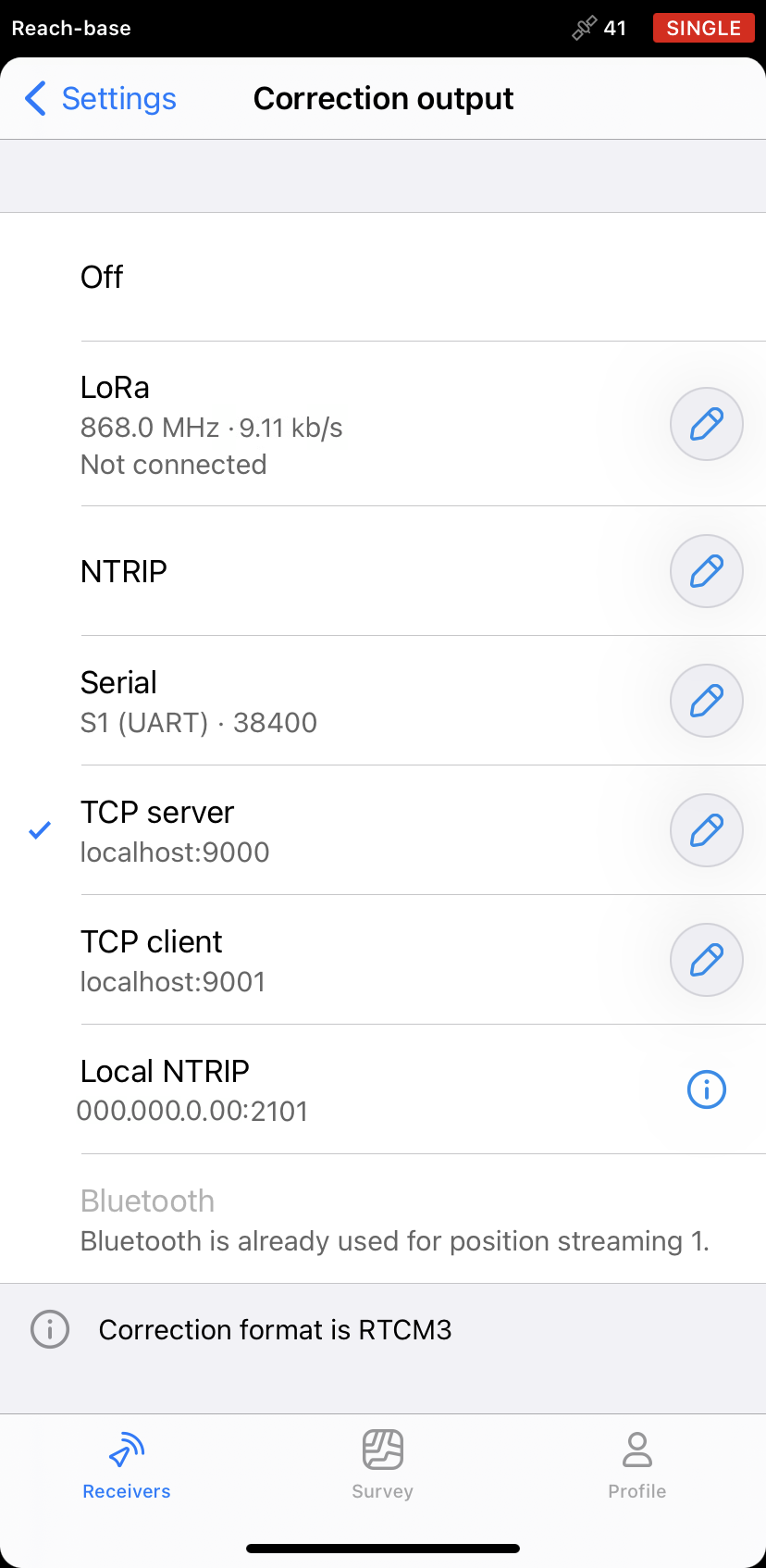
Por padrão, a base será configurada como localhost na porta TCP 9000.
-
Vá para a tela Configurações de base e aguarde até que a base calcule a média da sua posição.
-
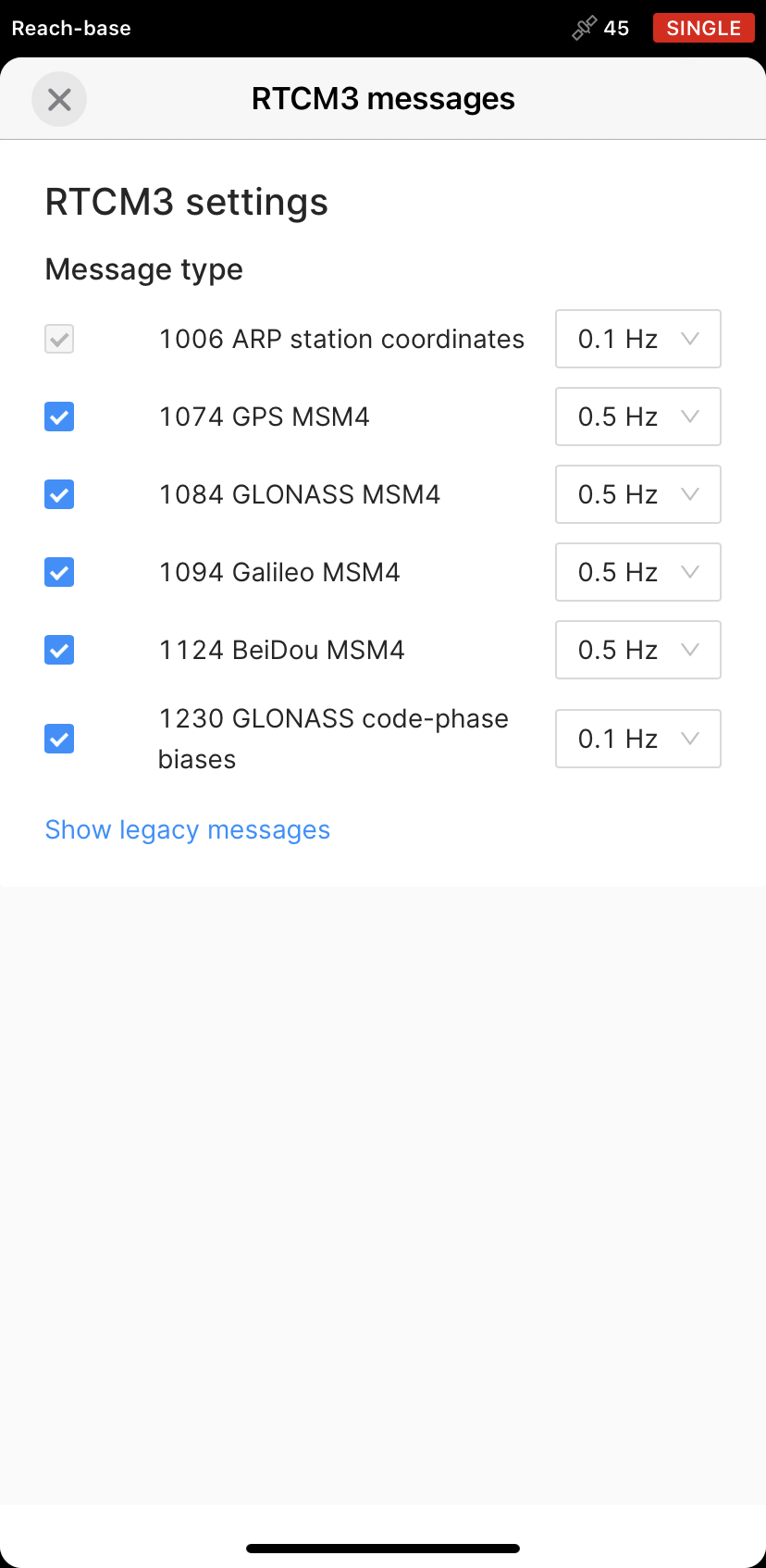
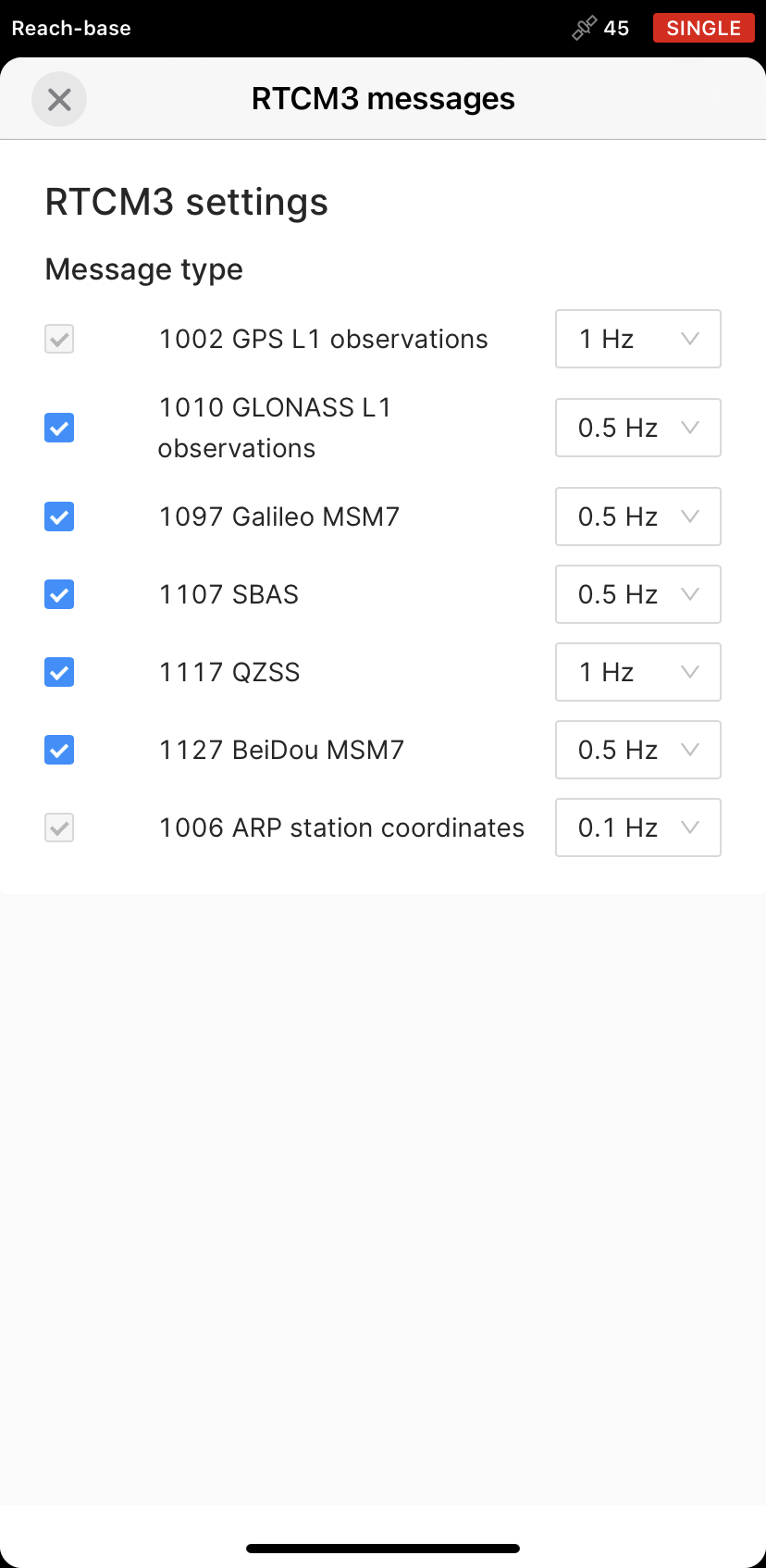
Na lista de mensagens RTCM3, selecione a saída das mensagens em função do dispositivo Reach utilizado:
- Reach M2
- Reach M+
Selecione a saída das coordenadas da estação ARP a 0,1 Hz, das mensagens MSM4 a 1 Hz e das polarizações de fase do código GLONASS a 0,1 Hz.
Selecione para produzir observações GPS L1 a 1 Hz, observações GLONASS L1 a 0,5 Hz, Galileo MSM7 a 0,5 Hz, SBAS a 0,5 Hz, QZSS a 1 Hz, BeiDou a 0,5 Hz e coordenadas da estação ARP a 0,1 Hz.
Configure o rover
Quando terminar com a base, você precisará definir as configurações RTK no rover. Siga os passos abaixo:
-
Conecte-se à unidade rover.
-
Vá para Configurações e toque em Configurações GNSS.
-
Selecione os mesmos sistemas GNSS usados para a base e defina uma taxa de atualização GNSS de 5 Hz. Aplicar alterações.
Quando terminar com a base, você precisará definir as configurações RTK no rover. Siga os passos abaixo:
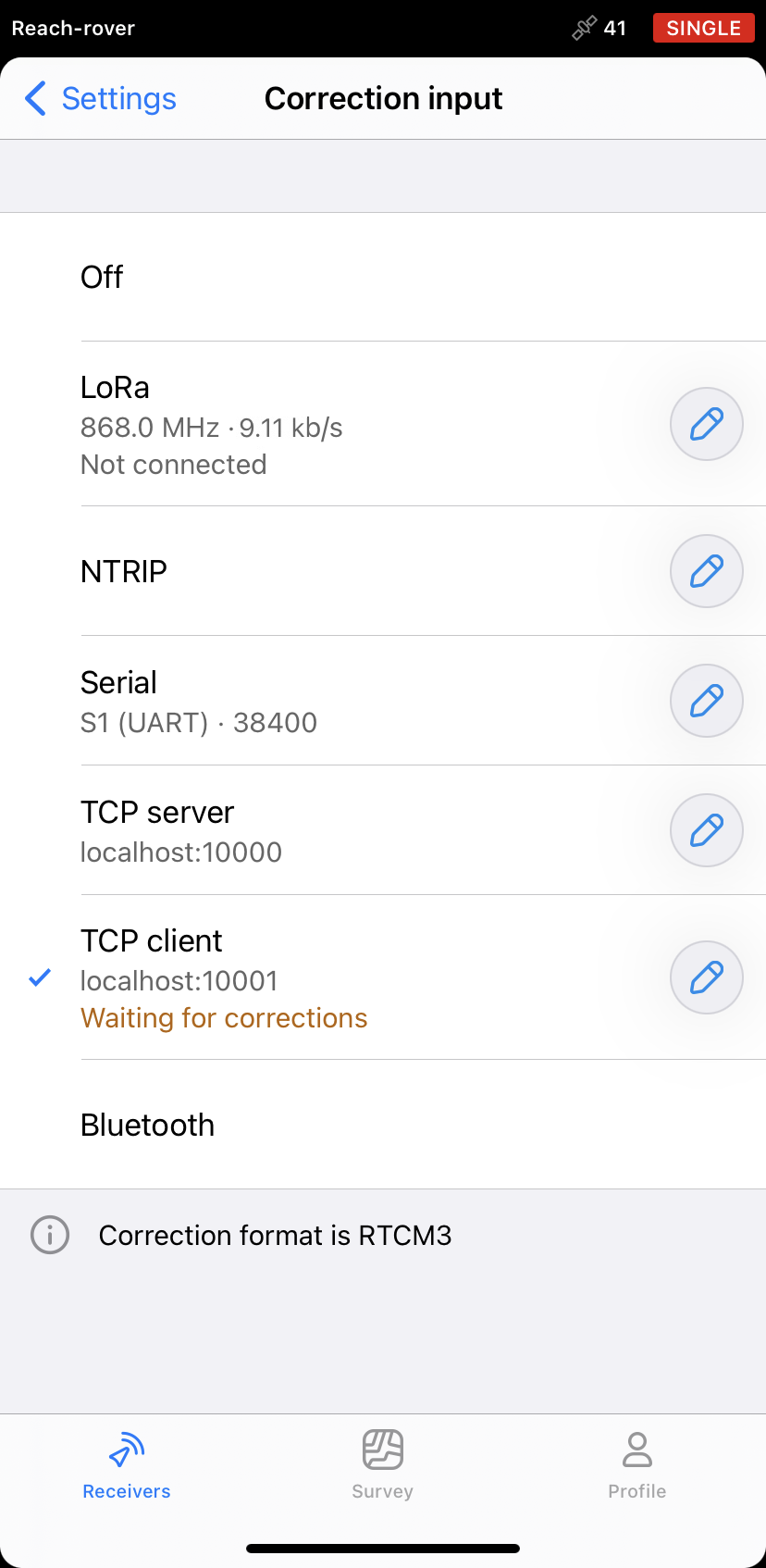
- Retorne à tela Receptores. Vá para Entrada de correção e escolha Cliente TCP.
-
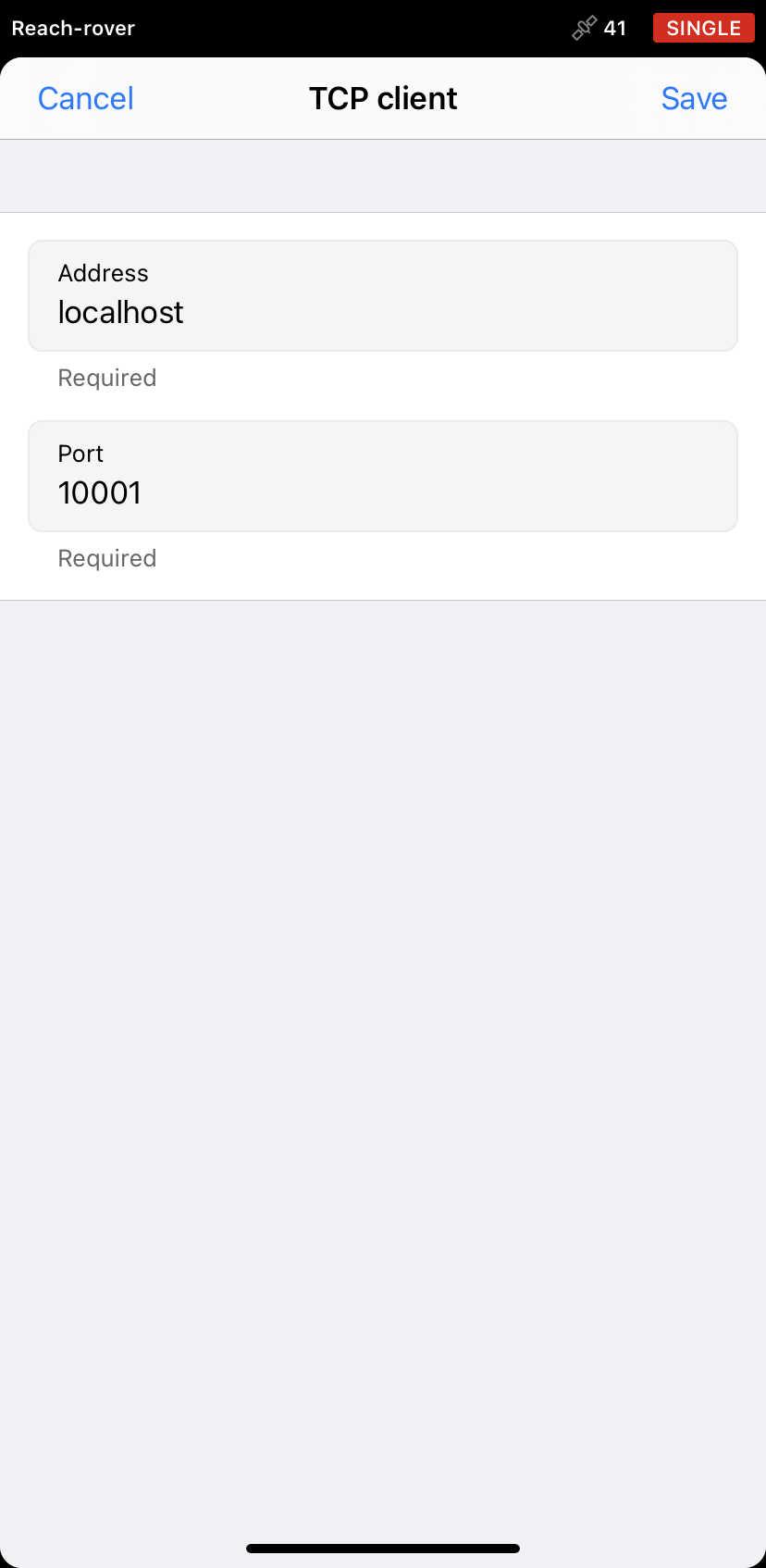
Adicione o endereço IP de base no campo Address.
-
Adicione a porta de correção de base no campo Port.
-
Toque em Salvar para aplicar as configurações.
-
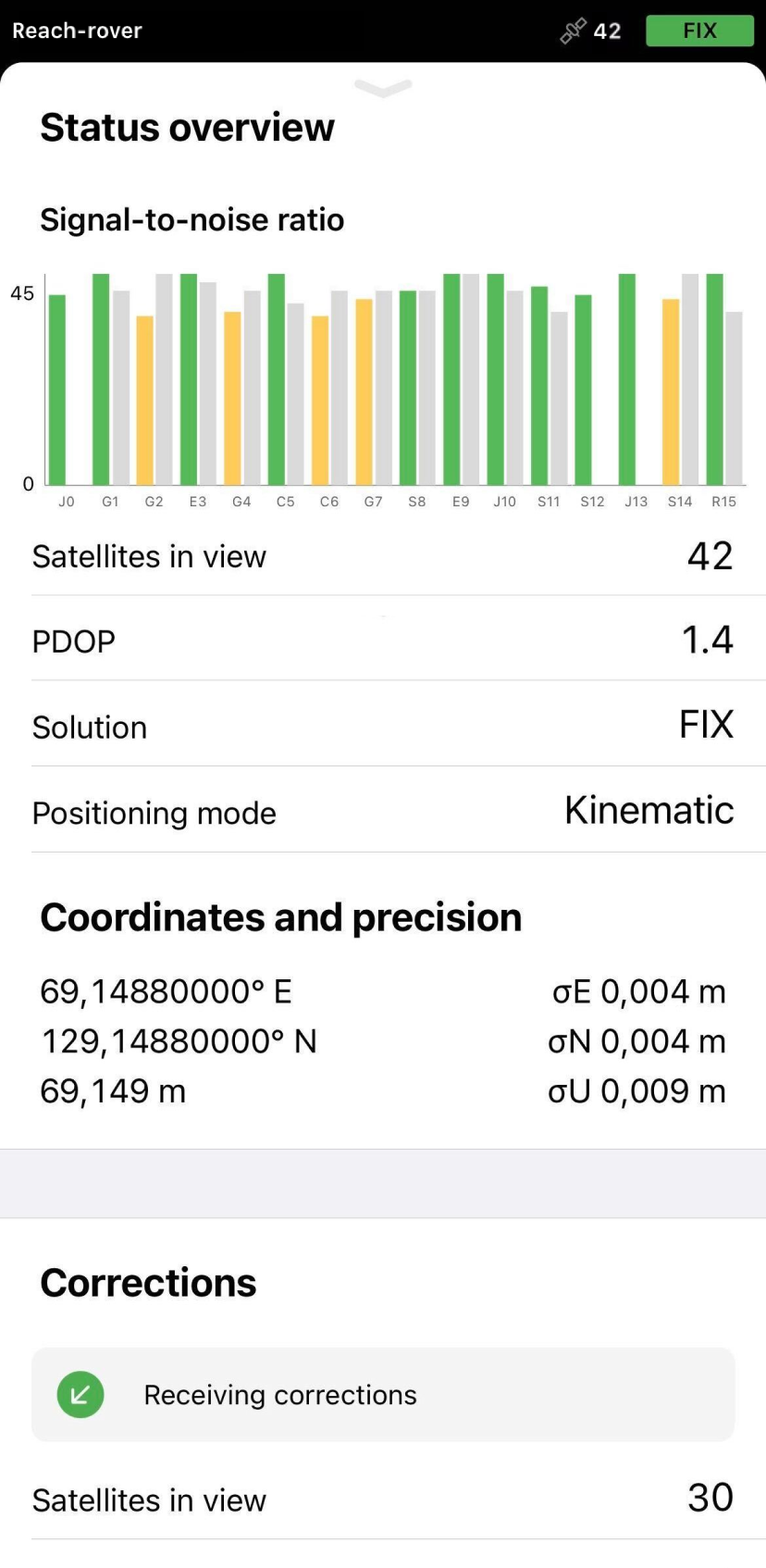
Vá para a tela Status. Se tudo estiver configurado corretamente, você verá a notificação Recebendo correções.
Ver resultados
Você pode ver o status da solução atual no canto superior direito do aplicativo Emlid Flow:
-
SINGLE significa que o rover encontrou uma solução que depende de seu próprio receptor e que as correções de base não são aplicadas. Para os receptores Reach, recomendamos uma taxa de atualização de 1 Hz na base e de 5 Hz no rover.
-
FLOAT significa que o rover recebe correções da base, mas não consegue resolver todas as ambiguidades e, nesse caso, a precisão geralmente está em nível abaixo de um metro.
-
FIX significa que o rover, usando as correções da base, resolveu as ambiguidades em seu cálculo posicional e obteve a solução com precisão de centímetro.
Após um curto período de tempo, o rover obtém uma solução fixa. Em bons ambientes, demorará alguns minutos para obter uma solução de fixação. Em condições difíceis, pode demorar um pouco mais. Assim que o rover receber o FIX, estará tudo pronto para o levantamento topográfico.
Você também pode encontrar o status atual da solução e sua posição em tempo real na tela Status.
Para obter mais informações sobre o posicionamento dos receptores, consulte o guia Antenna placement.