Glossário
Distância cartográfica 2D
A distância cartográfica 2D entre os pontos A e B é o comprimento da linha reta AB em um plano.
Distância terrestre 2D
A distância terrestre 2D entre os pontos A e B é o comprimento da linha AB mais curta na superfície do elipsoide.
Perímetro 2D
O perímetro 2D de um objeto fechado é a soma das distâncias 2D de seus lados sem levar em consideração a diferença de altura.
Posicionamento absoluto
O posicionamento absoluto mostra as suas coordenadas globais atuais relativamente à superfície da Terra. O posicionamento absoluto é fundamental para os levantamentos RTK em que é necessária uma exatidão geográfica absoluta (por exemplo, cartografia, levantamento dos limites da propriedade, etc.). Neste caso, a posição absoluta da base é crucial para obter resultados de elevada exatidão.
Exatidão
A exatidão é a proximidade das medições a um valor específico. Em topografia, exatidão refere-se ao fato de as coordenadas recolhidas serem verdadeiras em relação às coordenadas globais. Não deve ser confundido com Precisão.
Data das correções
A data das correções, ou idade do diferencial (AOD - Age of differential), é uma medida da idade das correções enviadas ao receptor. É calculado subtraindo o instante em que a mensagem de correção foi gerada do instante atual do receptor. A idade padrão do diferencial para RTK é normalmente de 1-2 segundos.
Centro de fase da antena
O centro de fase da antena (APC) é o ponto efetivo numa antena GNSS ao qual se refere a recepção do sinal de satélite. Todas as medições GNSS referem-se ao centro de fase. A localização precisa do centro de fase da antena é determinada através das medições de calibração do National Geodetic Survey, essenciais para o posicionamento GNSS preciso.
Usando o valor de APC obtido, o Emlid Flow compensa o deslocamento entre o ponto de referência da antena (ARP) na parte inferior dos receptores Reach e o APC, de modo que você só precisa inserir a altura do tripé ou do bastão de levantamento.
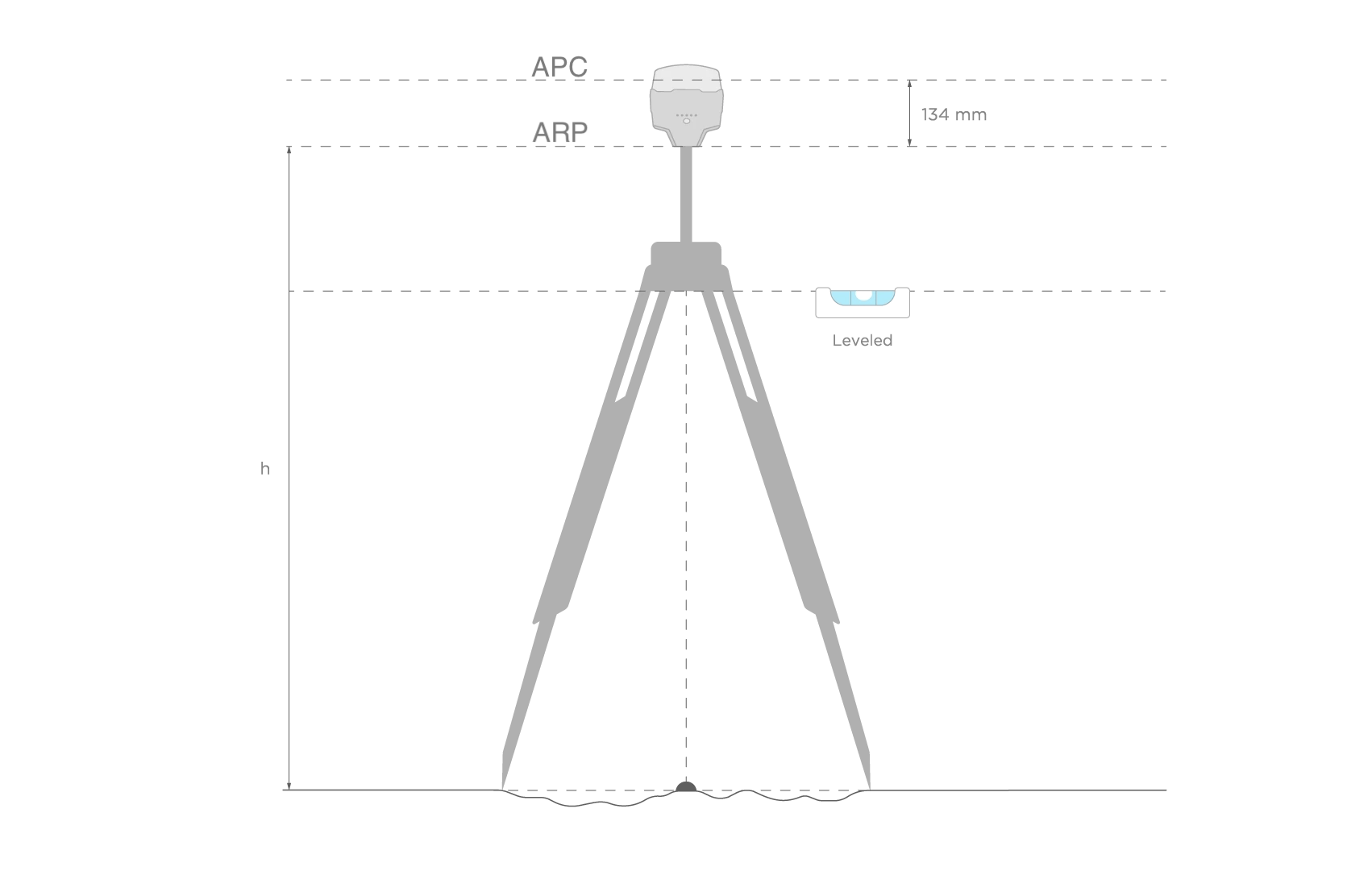
Ponto de referência da antena
O ponto de referência da antena é o ponto central na parte inferior do receptor. É utilizado para o cálculo da altura da antena.
Área
A área de um objeto é a quantidade total de espaço delimitada por sua forma em uma superfície plana.
Relação AR
Este é o resultado do teste de razão realizado na solução potencial “Fix”, que mostra quantas vezes a melhor solução é melhor que a segunda opção. Se este número for superior a 3, o Reach considerará a solução RTK Fixa.
Este parâmetro corresponde apenas a dispositivos Reach monobanda (Reach RS/RS+, Reach Module/M+).
Base
A base é um dos receptores que atua como estação de referência em cenários RTK ou PPK. É uma unidade estática com as coordenadas determinadas que envia correções para a unidade móvel ou rover. Se a base for colocada sobre o ponto conhecido, ela vai proporcionar uma exatidão absoluta.
Log de correção de base
Este log contém as correções da estação de base no formato RTCM3.
Linha de base
A linha de base é a distância entre um rover e uma base. Se a linha de base for maior do que a recomendada, a solução será menos exata, o tempo de correção será mais longo ou não será sequer calculado.
Saída da base
A saída da base são os dados enviados por uma estação base para um rover. Ele contém correções para melhorar a precisão das informações de posicionamento. No aplicativo Emlid Flow, na tela de saída da base, você pode configurar como sua base envia correções das seguintes maneiras: Serial, TCP, NTRIP, Bluetooth ou LoRa. Os dispositivos Reach suportam a saída da base no formato RTCM3.
BeiDou
BeiDou é um sistema de navegação chinês. Em 2000, o BeiDou-1 cobria apenas a China. Depois, em 2012, o BeiDou-2 começou a cobrir a região Ásia-Pacífico. Desde 2015, o BeiDou oferece uma cobertura global. Recomendamos a utilização deste sistema se você estiver localizado na região Ásia-Pacífico.
Atualizações beta
As atualizações beta são versões de software de pré-lançamento usadas para testes e feedback. Eles ajudam os desenvolvedores a encontrar e corrigir problemas, aprimorar recursos e coletar opiniões dos usuários para melhorar a qualidade do software antes do lançamento oficial.
Modo cliente
O modo cliente significa que o Reach está conectado a uma rede Wi-Fi externa.
Contínuo
O contínuo é uma estratégia para resolver as ambiguidades em RTK e PPK. Neste caso, as ambiguidades são resolvidas época a época. Menos estável que Fix-and-Hold, mas sem risco de manter uma falsa fixação.
Sistema de coordenadas
O sistema de coordenadas é um sistema local, regional ou global baseado em coordenadas, utilizado para localizar entidades geográficas. Um sistema de referência espacial define uma projeção cartográfica específica, assim como transformações entre diferentes sistemas de referência espacial.
Entrada de correção
Esta é a parte das configuraç�ões do rover que é responsável por configurar a aceitação das correções. Usando a configuração de entrada de correção no aplicativo Emlid Flow, você pode escolher a maneira como o rover recebe as correções: via Serial, TCP, NTRIP, Bluetooth ou LoRa. Os receptores Reach suportam a entrada de correção no formato RTCM3.
Correções
As correções são os dados utilizados para eliminar os atrasos ionosféricos e troposféricos e os erros do relógio do satélite. A base estática transmite correções ao rover em movimento no cenário RTK.
CORS
A rede de estações de referência em funcionamento contínuo, ou rede CORS, é a rede de estações estáticas que fornecem dados GNSS exatos (fase portadora, faixa de códigos, etc.) e também correções. Os topógrafos podem aceder a esta informação para aumentar a precisão dos seus dados de levantamento pós-processados ou para trabalhar em RTK no local.
Delta E/N
O delta E/N entre os pontos A e B é a diferença em suas coordenadas ao longo dos eixos leste e norte correspondentes.
Diluição da precisão ou DOP
Diluição da precisão (Dilution of Precision), ou DOP, é o termo utilizado para avaliar a posição geométrica dos satélites em relação ao receptor. Quando os satélites estão demasiado próximos uns dos outros no campo de visão, significa que a geometria do satélite é fraca (um valor DOP elevado). Se a distância entre os satélites for suficiente e estes forem distribuídos uniformemente e cobrirem mais espaço, a geometria é considerada forte, assim o valor de DOP é baixo. Quanto mais baixo for o DOP, mais exatos serão os dados. Considera-se que um bom valor de DOP é inferior a 2.
Direção (azimute)
A direção (azimute) de uma linha AB, ou do ponto A ao B, é um ângulo horizontal em graus, medido no ponto A no sentido horário entre a direção para o norte e a direção para o ponto B.
Endereço IP dinâmico
Um endereço IP dinâmico é um endereço IP atribuído automaticamente ao dispositivo Reach por um servidor DHCP (Dynamic Host Configuration Protocol) toda vez que o dispositivo Reach se conecta à rede ou é reinicializado. Esses endereços são temporários e podem mudar com o tempo, o que contrasta com os endereços IP estáticos, que permanecem os mesmos.
Fix-and-Hold
A máscara de elevação pode ser configurada nas configurações RTK no aplicativo Emlid Flow. Os satélites mais baixos do que a elevação definida serão excluídos do cálculo. A configuração padrão é de 15 graus. Normalmente, os satélites com uma elevação mais baixa fornecem medições demasiado ruidosas, uma vez que o sinal atravessa uma faixa maior de atmosfera.
Emlid Flow
O Emlid Flow é o aplicativo móvel criado pela Emlid. É utilizada para controlar e configurar os receptores Reach, criar projetos, coletar pontos, etc.
ENU
Um dos formatos para a transmissão de posição disponível para dispositivos Reach. Protocolo de texto simples para os componentes Leste, Norte e ACIMA da linha de base, assim como para o status da solução.
ERB
Um dos formatos para a transmissão de posição disponível para dispositivos Reach. Utilizado para comunicação com o ArduPilot. ERB é a sigla do protocolo Emlid Reach Binary.
Conector inferior externo
O conector inferior externo é um conector de 9 pinos localizado na parte inferior do Reach RS/RS+, RS2/RS2+ e RS3. Ele é usado para fornecer energia constante a partir de uma bateria externa, para estabelecer comunicação RTK com dispositivos de terceiros e para transmitir a posição do Reach para outros dispositivos ou aplicativos de terceiros. Ele usa o protocolo de comunicação serial RS-232.
Fix-and-Hold
Fix-and-Hold é uma estratégia para resolver as ambiguidades em RTK e PPK. Após a primeira ambiguidade, o estado fix os mantém limitados. O estado fix é mais estável, mas caso a primeira inicialização não tenha sido correta, vai demorar mais tempo a recuperar e a inicializar corretamente. Pode pensar-se nisso como se o Fix tivesse inércia.
Relatório completo do sistema
Um relatório de sistema completo é uma ferramenta utilizada para facilitar os relatórios de problemas. Vem num arquivo ZIP e contém os logs do sistema e detalhes técnicos do seu dispositivo, assim como algumas informações sensíveis como suas credenciais NTRIP ou senhas de rede. É por isso que não recomendamos o compartilhamento público do relatório. Estes são utilizados para depurar casos complicados no suporte.
Galileo
O Galileo é um sistema europeu de navegação por satélite. Começou a funcionar em 2011 e tem atualmente uma cobertura global.
Datum global
O datum global é um sistema de referência de coordenadas elipsoidais usado pelo receptor para medir as coordenadas antes da aplicação de qualquer transformação.
Greide
O greide de uma linha é a medida de sua inclinação, com valores maiores representando inclinações mais acentuadas e 0% indicando uma linha horizontal.
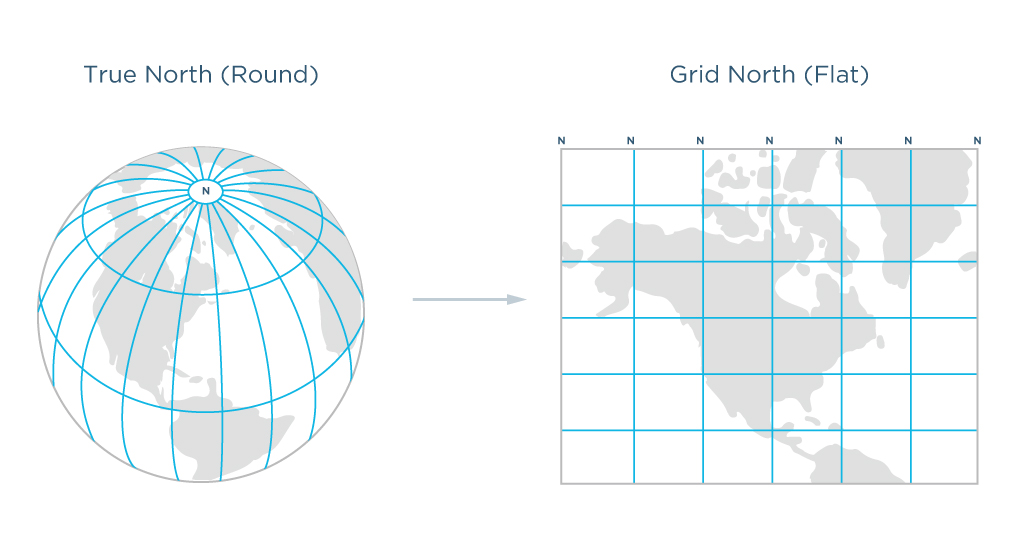
Azimute norte cartográfico
O azimute norte cartográfico é o ângulo medido no sentido horário entre uma linha paralela ao meridiano central e a direção de um ponto de interesse (uma linha reta entre dois pontos no plano da projeção).
Distância cartográfica
A distância cartográfica é a distância medida no plano da projeção.
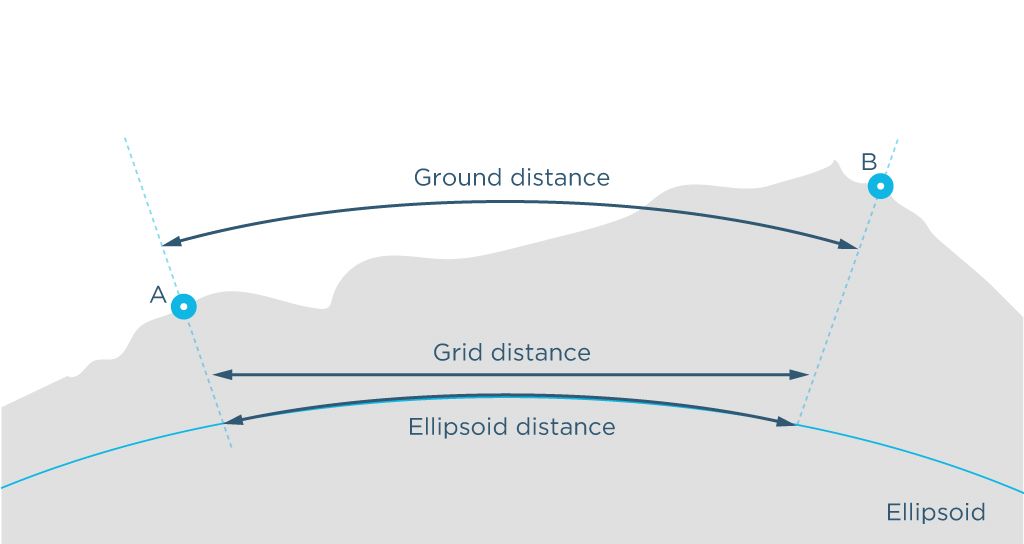
Distância terrestre
A distância terrestre é a distância medida na superfície real da Terra, levando em conta a elevação média dos pontos medidos.
Ponto de Controle Terrestre ou GCP
O Ponto de Controle Terrestre é um ponto numa superfície com coordenadas conhecidas. Os GCPs são utilizados ativamente na cartografia aérea e na fotogrametria. Os topógrafos definem os GCPs sobre a área e os marcam para que sejam visíveis a partir do drone. Os GCPs são então levantados para encontrar as suas coordenadas exatas e utilizados como pontos de referência para posterior processamento dos dados.
GIS
Um Sistema de Informação Geográfica ou GIS é um sistema para recolher, armazenar, analisar e visualizar graficamente dados espaciais e informações relacionadas sobre os objetos necessários.
GLONASS
O GLONASS é um sistema global de navegação por satélite. Foi criado como uma alternativa ao GPS na União Soviética e lançado pela primeira vez em 1982.
Modo GLONASS AR
Um parâmetro de processamento que permite ativar e desativar a resolução de ambiguidades para o sinal GLONASS separadamente. Ao contrário do GPS, todos os satélites GLONASS transmitem em frequências diferentes, o que resulta em desvios inter-canal (ICB) que são únicos para cada modelo de receptor.
Os dispositivos Reach podem corrigir os ICBs do GLONASS, permitindo o uso de GLONASS AR com bases não-Reach, como os lançadores NTRIP. A recomendação geral é ter o GLONASS AR sempre configurado como ativado.
Este parâmetro corresponde apenas a dispositivos Reach monobanda (Reach RS/RS+, Reach Module/M+).
GNSS
O Sistema Global de Navegação por Satélite ou GNSS é um sistema concebido para determinar a localização (coordenadas geográficas) de objetos terrestres, aquáticos e aéreos. Estes sistemas são constituídos por equipamentos espaciais, um segmento terrestre denominado sistemas de controle e receptores individuais. O funcionamento do GNSS baseia-se na medição da distância entre a antena do objeto (receptor) e os satélites cuja posição é conhecida com grande exatidão.
GPS
O Sistema de Posicionamento Global ou GPS é um sistema global de navegação por satélite que mede a distância, o tempo e a localização no sistema mundial de coordenadas WGS 84. O sistema foi desenvolvido em 1978 e é operado pelos Estados Unidos.
Plano de terra
Um plano de terra é uma placa condutora que fornece isolamento para a antena. Pode ser uma peça de metal, o teto de um automóvel, o telhado metálico de um edifício, etc. Recomenda-se a utilização de um plano de terra de, pelo menos, 70x70 mm.
Adaptador de sapata
A sapata é um ponto na parte superior de uma câmera utilizado para fixar acessórios ou outro equipamento à câmera. Usando um adaptador de sapata, você pode conectar a sua câmara ao Reach M2/M+ para mapeamento com VANTs.
Modo hotspot
O modo hotspot significa que o Reach está transmitindo a sua própria rede Wi-Fi.
Posicionamento cinemático
O posicionamento cinemático é um dos dois modos de posicionamento. Isto implica que o rover está em movimento durante o processo de posicionamento.
LLH
Um dos formatos para a transmissão de posição disponível para dispositivos Reach. Protocolo de texto simples para Latitude, Longitude e Altura, bem como para o status da solução.
Localização
A localização no levantamento GNSS é um recurso para calcular os parâmetros do sistema de coordenadas local ou ajustar o existente para se adequar aos pontos de controle na área de levantamento.
Rádio LoRa
O rádio de longo alcance ou LoRa é utilizado para que os receptores Reach enviem ou recebam correções sem uma conexão à Internet. O Reach RS2/RS2+/RS+ está equipado com um rádio Lora interno. O Reach M2/M+ tem disponível um rádio LoRa externo: você pode conectá-lo através da porta S2. O rádio só funciona de uma forma: ou envia correções ou as recebe. Utilizando a modulação LoRa, é possível atingir até 19 km (11,8 mi) em linha de visão.
Localização simulada (mock location)
A funcionalidade de localização simulada (mock location) dos dispositivos Android permite alterar manualmente a localização do seu dispositivo para qualquer outro local. No caso dos dispositivos Reach, permite que as aplicações de GPS obtenham as observações GPS diretamente do receptor em vez de usar o GPS interno da unidade.
Estação de referência
A estação de referência (mount point) é uma fonte de dados de correção relacionada com a estação de referência física ou virtual específica escolhida ou criada com base na sua localização, respectivamente. Ao receber correções de um VRS, você precisa ativar o envio da posição do seu receptor no formato NMEA.
Coleta de pontos
A coleta de pontos é uma funcionalidade do aplicativo Emlid Flow que permite encontrar as coordenadas exatas do ponto. Isto significa que o receptor demora menos tempo a estabelecer a primeira solução de fixação, tem uma linha de base mais longa e tem mais chances de manter a solução de fixação em condições de céu bloqueado.
Multitrajetória
Multitrajetória é um efeito que ocorre quando o sinal GPS é desviado dos obstáculos, de forma que o receptor GNSS detecta não apenas os sinais que vêm diretamente dos satélites, mas também de objetos locais. O efeito multitrajetória resulta num erro nas medições de pseudo-alcance, afetando assim a exatidão posicional.
Modo noturno
O modo noturno permite que você desligue os LEDs até a próxima reinicialização do dispositivo Reach.
NMEA 0183
Um dos formatos para a transmissão de posição disponível para dispositivos Reach. O padrão mais popular do setor. Mensagens suportadas: GNRMC, GNGGA, GNVTG, GNGST, GNZDA, GNEBP, GPRMC, GPGSA, GPGGA, GPGSV, GPVTG, GPGST, GPZDA, GPEBP, GLGSA, GLGSV, GAGSA, GAGSV, GBGSA, GBGSV.
NTRIP
A rede NTRIP (Networked Transport of RTCM via Internet Protocol) é uma fonte alternativa de correções. O NTRIP permite que o seu rover aceite correções através da Internet, sem a necessidade de um segundo receptor local funcionando como base. Uma estação de referência colhe os dados e envia-os para o NTRIP caster, onde são retransmitidos através da porta Internet para o rover cliente conectado através de uma porta específica e autorizada.
Nuvem de pontos
A nuvem de pontos é um conjunto de vértices num sistema de coordenadas tridimensional. As nuvens de pontos são criadas com scanners 3D e são utilizadas em fotogrametria e modelagem 3D.
Coleta de pontos
A coleta de pontos é uma funcionalidade do aplicativo Emlid Flow que permite encontrar as coordenadas exatas do ponto. O receptor determina as coordenadas (x, y, z) de um ponto no solo e registra no seu projeto para processamento posterior.
Locação de pontos
A locação de pontos (point stakeout) é uma funcionalidade do aplicativo Emlid Flow que permite encontrar pontos com coordenadas conhecidas no local.
Altura do bastão
Ao se preparar para a coleta de pontos, configure a altura do seu bastão topográfico no Emlid Flow. Ajudará a aplicação a calcular automaticamente a altura da antena.
Log de posições
O Emlid Flow é o aplicativo móvel criado pela Emlid. Os dispositivos Reach podem registrar sua posição nos formatos LLH, XYZ, ENU, NMEA e ERB.
Transmissão de posição
Os dispositivos Reach podem enviar os dados de posição para aplicações GIS de terceiros e dispositivos externos, incluindo tratores, drones, robôs e muito mais. A posição pode ser compartilhada via Serial, TCP e Bluetooth. Diversos aplicativos exigem formatos diferentes dos dados de posição, por isso o Reach emite sua posição em LLH, XYZ, ENU, NMEA e ERB.
PPK
A cinemática pós-processada (Post-Processed Kinematic - PPK) é uma das técnicas utilizadas para levantamentos de elevada exatidão. Da mesma forma que em RTK, são necessárias duas unidades: uma base e uma rover. A principal diferença é que no cenário PPK não é necessária uma conexão em tempo real entre duas unidades. A base e o rover registram logs separados e esses logs são posteriormente processados juntos utilizando software específico para pós-processamento, por exemplo, RTKLib.
PPP
O Posicionamento por Ponto Preciso ou PPP é uma técnica utilizada para determinar as coordenadas exatas do ponto a um nível centimétrico. O receptor colocado sobre um ponto está registrando dados durante um determinado período. Em seguida, estes dados são enviados para os serviços PPP.
Precisão
A precisão é a proximidade de duas ou mais medições entre si. Precisão significa que as coordenadas coletadas são verdadeiras relativamente a outro objeto. Neste caso, não são necessárias coordenadas georreferenciadas exatas dos pontos, basta saber que os pontos colhidos estão, digamos, situados à mesma distância uns dos outros. Não deve ser confundido com Exatidão.
QZSS
QZSS é a sigla de Quasi-Zenith Satellite System, o sistema de satélites japonês. Ela atende principalmente à região da Ásia-Pacífico, com foco especial nas necessidades do Japão de informações de posicionamento precisas e confiáveis. O primeiro satélite foi lançado em 11 de setembro de 2010 e entrou em operação em 2018.
Log de dados brutos
Um log de dados brutos contém observações GNSS do receptor sem o cálculo de coordenadas exatas. Ele pode ser gravado em UBX ou diretamente no formato RINEX padrão do setor.
Reach Panel
O Reach Panel é uma ferramenta que permite acessar o Reach em um navegador, monitorar seu status e obter opções adicionais, como o download de um grande número de registros e a configuração da saída de mensagens NMEA no Reach para integrá-lo a máquinas agrícolas antigas.
Posicionamento relativo
O posicionamento relativo mostra as suas coordenadas relativamente a outro objeto de referência. A base envia informações sobre a sua posição absoluta para o rover. Utilizando esta informação, o rover determina a sua posição relativamente à base com uma exatidão centimétrica.
RINEX
O RINEX é um formato normalizado de dados brutos que permite armazenar observações de satélite e medições de dados de navegação realizadas pelo receptor. Permite também o pós-processamento dos dados recebidos por várias aplicações de diferentes fabricantes de receptores e programas.
RMS
A raiz quadrada da média do erro ao quadrado. Os cálculos RMS são utilizados para avaliar a exatidão da medição da posição.
Rover
O Rover é um dos dois receptores GNSS que é utilizado para coletar dados em cenários RTK ou PPK. O Rover é uma unidade móvel: o topógrafo usa o rover para registrar os pontos, enquanto o rover recebe as correções da [base] estática (#base).
RTCM3
O RTCM3 é um formato padrão da indústria para a saída de correção.
RTK
A cinemática em tempo real (Real-Time Kinematic - RTK) é uma das técnicas utilizadas para melhorar a exatidão dos dados obtidos dos satélites pelo receptor. Para o RTK, são necessários dois receptores: um base e um rover. A base envia correções para o rover em movimento durante a coleta de dados.
RTKCONV
RTKCONV é uma ferramenta no RTKLIB que converte dados brutos UBX ou dados de correção de base RTCM3 de um receptor para o formato RINEX.
Máscara SNR
O RTKLIB é um pacote de programas de código aberto para posicionamento padrão e preciso com GNSS. É utilizado para o processamento de dados PPK. Funciona com sinais de GPS, GLONASS, Galileo, QZSS, BeiDou e SBAS. A Emlid produz a versão da RTKLib adaptada aos produtos Reach.
RTKPLOT
O RTKPLOT é uma ferramenta do RTKLIB que permite visualizar e traçar as soluções de posição do RTKPOST, bem como os dados de observação do RTKCONV.
RTKPOST
RTKPOST é uma ferramenta para pós-processamento de logs brutos no RTKLIB. O resultado é armazenado no arquivo de solução de posição em LLH em coordenadas geográficas - arquivo POS. Neste arquivo, obteremos uma localização do receptor com exatidão centimétrica.
Porta serial (UART, USB, RS-232)
Uma interface de comunicação serial em que a informação é transferida sequencialmente, para dentro ou para fora, um bit de cada vez. Esse tipo de comunicação pode ser realizado através de vários dispositivos como UART, USB ou RS-232. Os receptores Reach podem utilizar uma porta serial para trocar dados de posição e de correção com dispositivos de terceiros.
Relação sinal-ruído
A relação sinal-ruído ou SNR é o principal indicador da qualidade da recepção. O valor é igual à razão da potência do sinal útil em relação à potência do ruído. Você pode encontrar o indicador SNR na tela principal do aplicativo Emlid Flow. Quando a SNR de um satélite for superior a 45, este será marcado em verde. As barras cinzentas indicam a SNR da estação base. Quanto mais satélites estiverem numa zona verde, mais precisas serão as suas medições e mais rápida será a resolução da ambiguidade.
Relatório de sistema simples
Um relatório de sistema simples é uma ferramenta usada para facilitar os relatórios de problemas. Fornece informações sobre a versão do Emlid Flow, as configurações e a rede num formato de texto simples.
Receptor monobanda
Um receptor monobanda é um dispositivo que aceita sinais do satélite numa única banda de frequência. Tem o mesmo nível de exatidão que o multibanda. O receptor monobanda tem uma linha de base mais curta em comparação com o receptor multibanda e poderá nem sequer encontrar uma solução fixa em condições de céu bloqueado.
Distância de declividade
A distância de declividade do ponto A ao ponto B é o comprimento da linha reta AB, medida ao longo do declive, levando em conta a diferença de altura entre os pontos.
Perímetro de declividade
O perímetro de declividade de um objeto fechado é a soma das distâncias de declividade de seus lados levando em consideração a diferença de altura.
Máscara SNR
A máscara de relação sinal-ruído (Signal-to-Noise ratio) ou máscara SNR é uma ferramenta que filtra os satélites utilizados para a solução de fixação. Os satélites com baixa SNR serão excluídos do cálculo. A configuração padrão predefinida no aplicativo Emlid Flow é 35.
Status da solução (fix, float, single)
O status da solução define a precisão que pode ser alcançada no momento. Existem três status de solução que você poderá ver ao trabalhar com dispositivos Reach.
SINGLE significa que o rover encontrou uma solução que depende de seu próprio receptor e que as correções de base não são aplicadas. A precisão em modo standalone situa-se geralmente no nível de vários metros.
FLOAT significa que o rover recebe correções da base, mas não consegue resolver todas as ambiguidades e, nesse caso, a precisão geralmente está em nível abaixo de um metro.
FIX significa que o rover, usando as correções da base, resolveu as ambiguidades em seu cálculo posicional e obteve a solução com precisão de centímetro.
Endereço IP estático
Um endereço IP estático é um endereço IP (Internet Protocol) fixo e imutável configurado manualmente para seu dispositivo Reach. Ele não muda com o tempo, ao contrário de um endereço IP dinâmico, que pode ser atribuído por um servidor DHCP (Dynamic Host Configuration Protocol) e poderá mudar sempre que o Reach se conectar à rede ou for reinicializado. Você pode atribuir ao seu Reach um endereço IP estático ao conectá-lo a uma nova rede Wi-Fi no aplicativo Emlid Flow ou no Reach Panel.
Posicionamento estático
O posicionamento estático é um dos modos de posicionamento. Assume que o rover Reach está estático. A restrição do sistema ajuda a resolver ambiguidades mais rapidamente, bem como a produzir medições com maior precisão.
TCP
O protocolo de controle de transmissão (Transmission Control Protocol - TCP) é um dos principais protocolos de transferência de dados da Internet criado para controlar a transferência de dados. O cenário típico de utilização do TCP é o envio de dados de correção para um aplicativo na mesma rede ou para um servidor com IP público.
Marca de tempo
A função de marca de tempo verifica o momento exato em que a câmera tira uma fotografia. Após o voo, você pode processar os logs brutos da base e de um rover para obter um arquivo "*_events.pos". Este arquivo inclui informações sobre a hora e as coordenadas de cada fotografia. Você pode utilizar software de georreferenciamento para gravar esta informação nos dados EXIF das imagens.
Azimute norte verdadeiro
O azimute norte verdadeiro é o ângulo que varia de 0 a 360 graus, medido no sentido horário, entre o norte verdadeiro e a direção de um ponto de interesse.
UBX
UBX é o formato de dados brutos GNSS. O protocolo UBX é um protocolo binário de propriedade da u-blox que produz resultados em formato hexadecimal.
Taxa de atualização
A taxa de atualização é um valor que indica a frequência com que o receptor calcula e comunica a sua posição. Para os receptores Reach, recomendamos uma taxa de atualização de 1 Hz na base e de 5 Hz no rover.
VRS
A Estação de Referência Virtual ou VRS é uma ferramenta útil para linhas de base longas. É uma estação de referência imaginária e desocupada gerada nas proximidades do usuário RTK. O rover envia os dados de volta para o NTRIP caster. O NTRIP permite unir os dados do seu rover e os dados das densas bases NTRIP para assim modelar uma base virtual próxima a você.
WGS 84
O Sistema Geodésico Mundial 1984 ou WGS 84 é o sistema global de parâmetros geodésicos da Terra, que inclui o sistema de coordenadas geocêntricas. Foi aceito em 1984 e define coordenadas relativas ao centro de massa da Terra, com um erro inferior a 2 cm.
XYZ
Um dos formatos para a transmissão de posição disponível para dispositivos Reach. Protocolo de texto simples para as coordenadas X, Y, Z da ECEF, bem como para o status da solução.