Basis und Rover einrichten
Holen Sie sich die Anleitungskarten für die Arbeit vor Ort auf Ihr Smartphone
Diese Anleitung zeigt, wie man zwei Reach RS2/RS2+ Einheiten als Rover und Basis einrichtet und wie man sie über das LoRa-Funkgerät im RTK-Modus arbeiten lässt.
Reach-Geräte umbenennen
Standardmäßig hat jeder Reach RS2/RS2+ denselben Namen, und als Erstes müssen Sie sie umbenennen, damit es einfacher ist, zwischen der Basis und dem Rover vor Ort zu unterscheiden. Um die Einheiten umzubenennen, gehen Sie wie folgt vor:
-
Stellen Sie eine Verbindung zum Reach RS2/RS2+ her, den Sie als Basis verwenden möchten.
Wie definiert man Reach RS2/RS2+?Wenn Sie eine Verbindung zu Ihrem Reach herstellen, blinken alle LEDs gleichzeitig. Wenn Sie während einer Vermessung blinkende LEDs benötigen, tippen Sie auf dem Bildschirm Empfänger auf die Zelle mit dem Namen Ihres Empfängers und erhalten Sie Zugriff auf die Schaltfläche Blinkende LEDs.
-
Gehen Sie zu Einstellungen und tippen Sie auf Empfängerinformationen.
-
Ändern Sie unter Empfänger und Hotspot-Name den Namen Ihres Reach zu reach-base.
noteDer von Ihnen eingegebene Name wird auch als Bezeichnung für das WLAN-Netzwerk verwendet, wenn sich der Reach im Hotspot-Modus befindet.
-
Drücken Sie Speichern.
tipVerwenden Sie einen speziellen Aufkleber aus der Verpackung, um das Gerät zu kennzeichnen.
-
Machen Sie dasselbe mit der zweiten Reach RS2/RS2+. Verwenden Sie jedoch den Namen reach-rover anstelle von reach-base.
Basis einrichten
Jetzt müssen Sie die RTK-Einstellungen und die Kommunikation über das LoRa-Funkgerät zwischen der Basis und dem Rover konfigurieren. Beginnen wir mit der Basis und folgen Sie den nachstehenden Schritten:
-
Stellen Sie eine Verbindung zur Basiseinheit her.
-
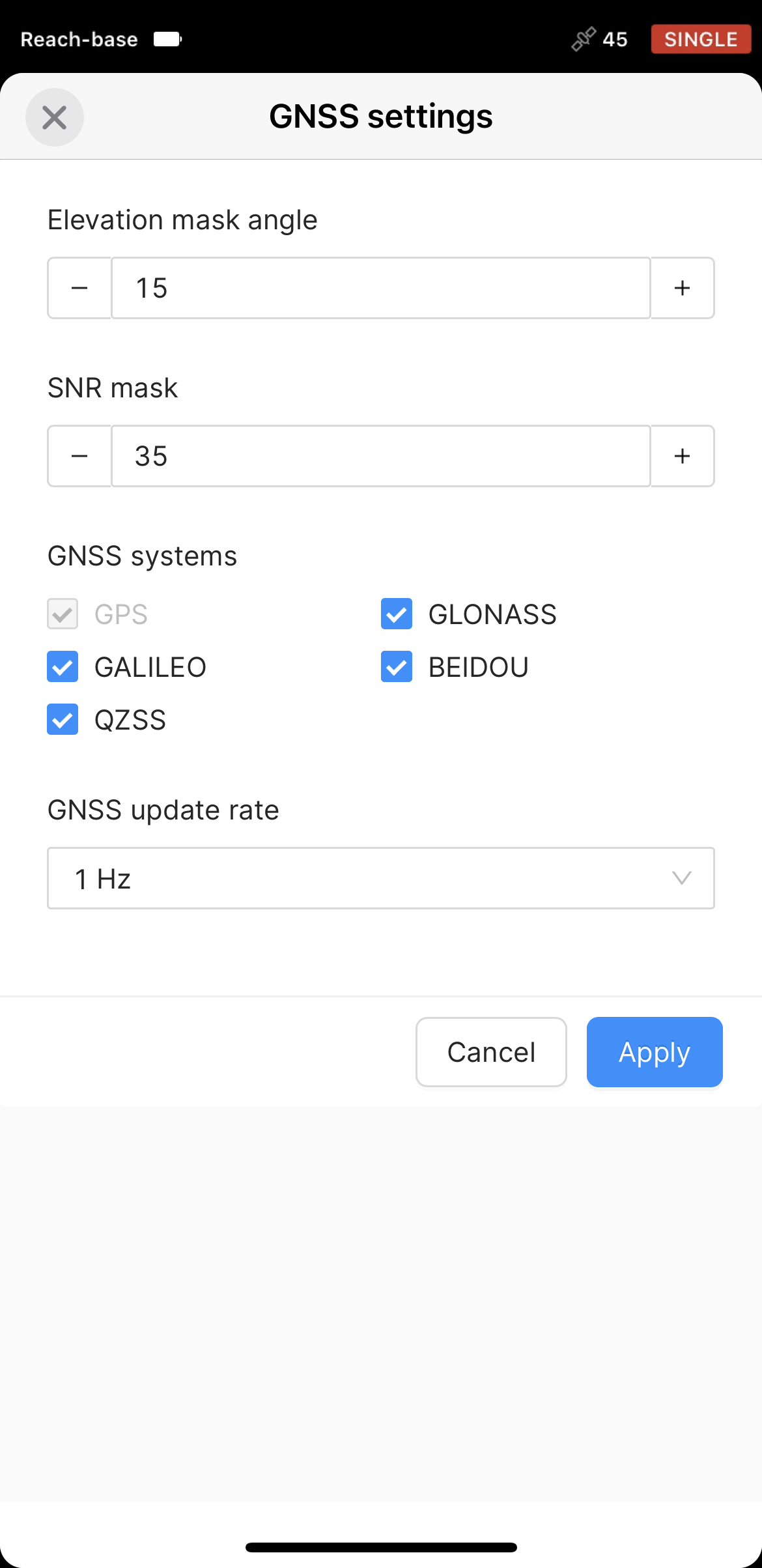
Gehen Sie zu Einstellungen und tippen Sie auf GNSS-Einstellungen. Wählen Sie die Satellitensysteme aus.
-
Stellen Sie die GNSS-Aktualisierungsrate auf 1 Hz ein.
-
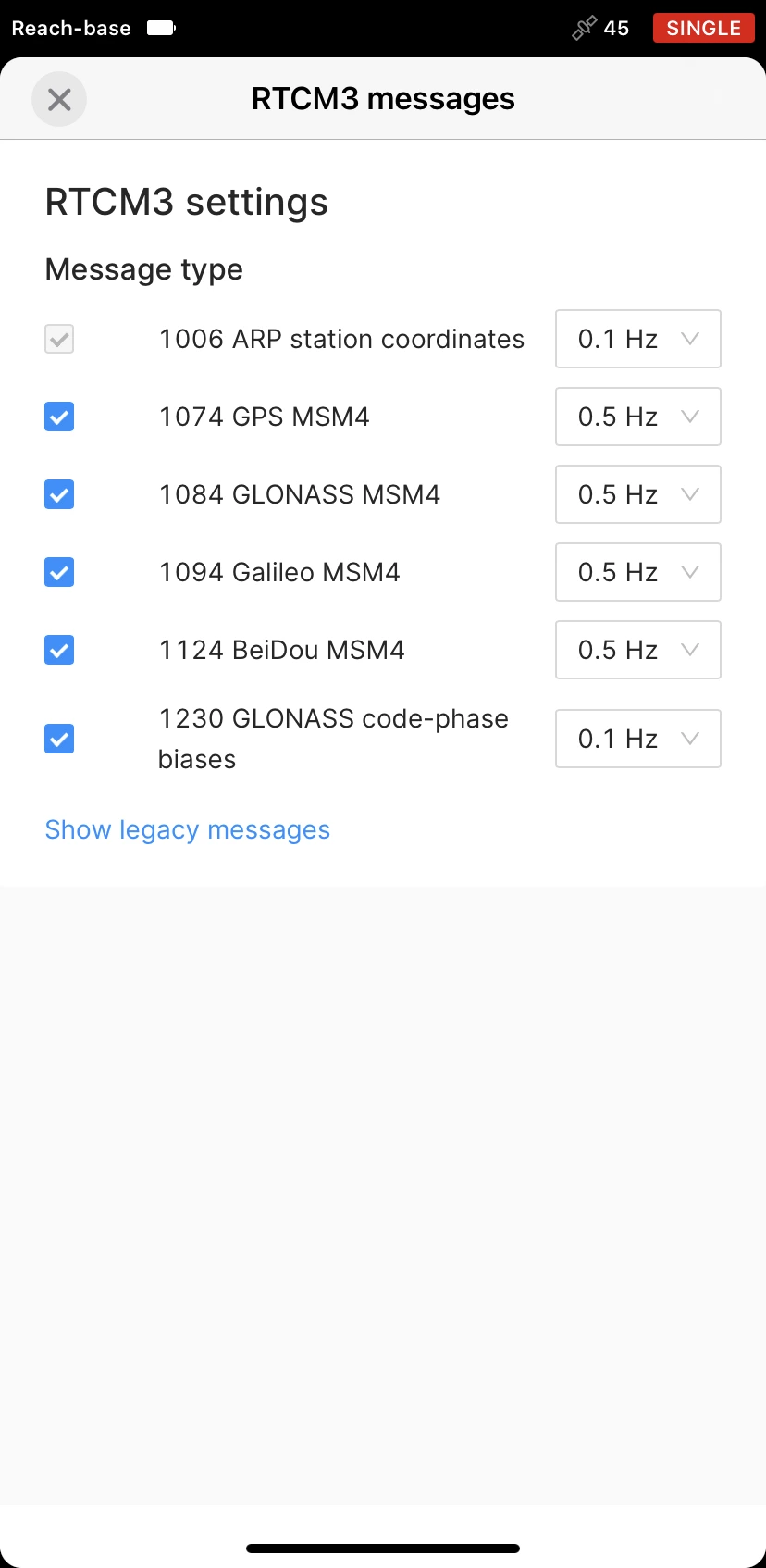
Kehren Sie zum Bildschirm Empfänger zurück. Gehen Sie auf dem Bildschirm Basiseinstellungen zu RTCM3-Meldungen.
-
Wählen Sie, um RTCM3-Nachrichten wie folgt auszugeben:
- ARP-Stationskoordinaten bei 0,1 Hz
- Andere MSM4-Meldungen bei 0,5 Hz
-
Tippen Sie auf Anwenden.
-
Kehren Sie zum Bildschirm Empfänger zurück. Wählen Sie auf dem Bildschirm Basisausgabe die Option LoRa.
-
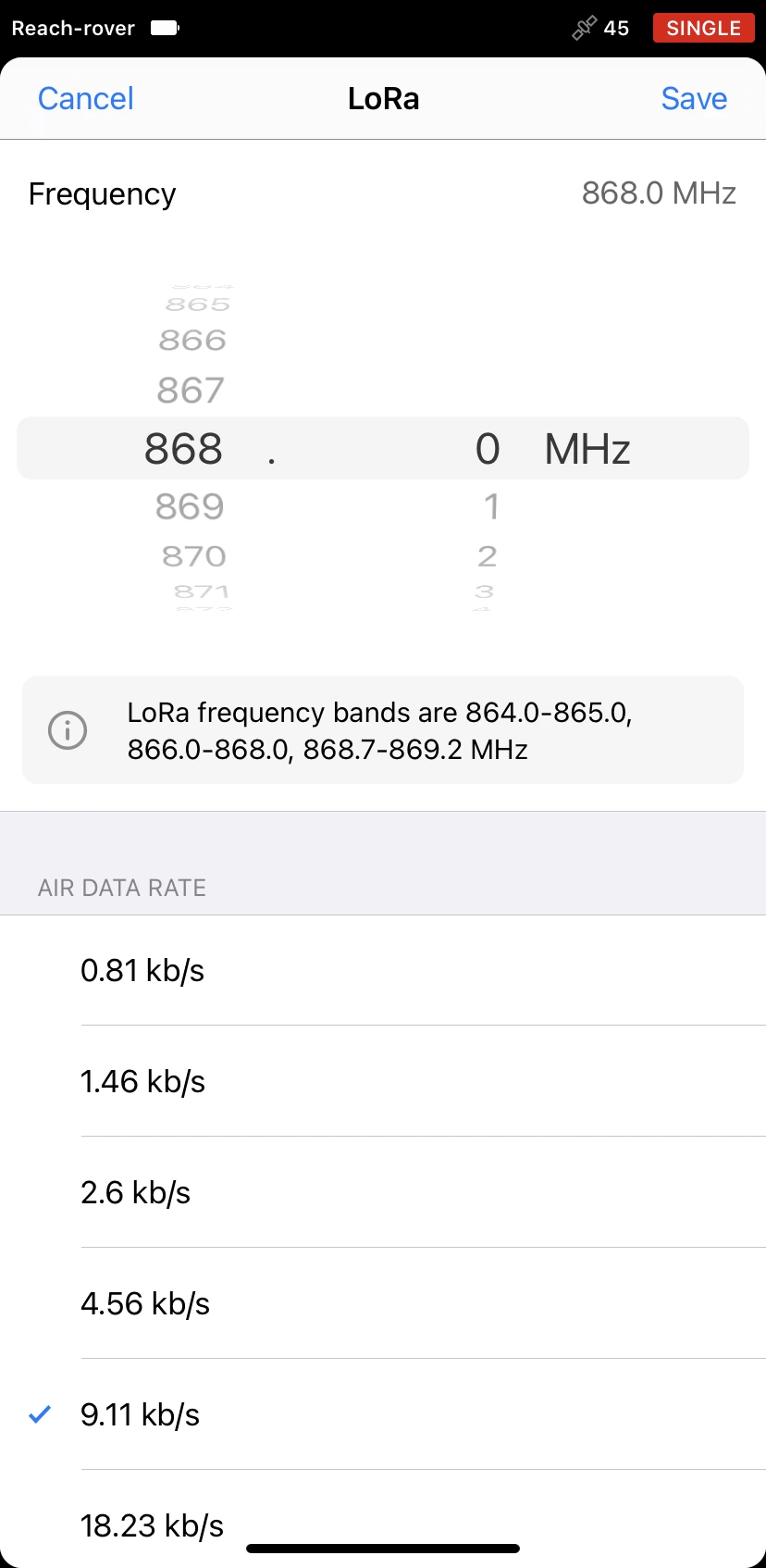
Tippen Sie auf die Schaltfläche Bearbeiten in der Zelle LoRa. Wählen Sie die Frequenz und stellen Sie die Ausgangsleistung auf 20 dBm ein.
cautionStellen Sie sicher, dass Sie die richtige Frequenz und Ausgangsleistung gemäß den örtlichen Vorschriften wählen. Bei Einschränkungen werden automatisch Frequenzbandbegrenzungen angewendet.
-
Stellen Sie die Luftdatenrate auf 9,11 kb/s ein. Tippen Sie auf Speichern.
Nun können Sie mit der Einrichtung Ihrer Rover-Einheit fortfahren.
Rover einrichten
Um die Konfiguration der RTK-Einstellungen und die Kommunikation über das LoRa-Funkgerät zwischen der Basis und dem Rover abzuschließen, müssen Sie Ihren Rover einrichten. Folgen Sie den nachstehenden Schritten:
-
Stellen Sie eine Verbindung zur Rover-Einheit her.
-
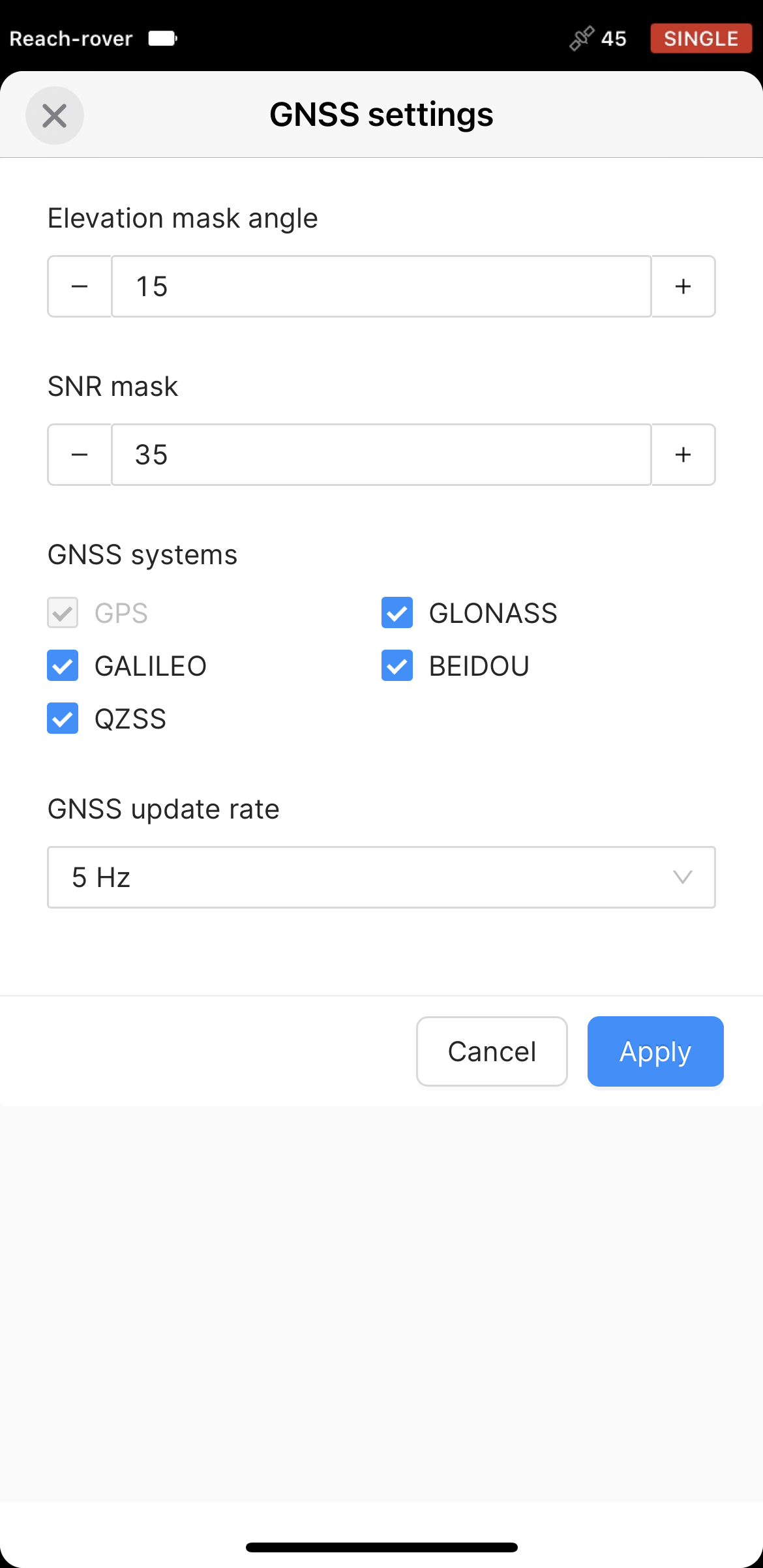
Gehen Sie zu Einstellungen und tippen Sie auf GNSS-Einstellungen.
-
Wählen Sie die gleichen GNSS-Systeme wie für die Basis und stellen Sie eine GNSS-Aktualisierungsrate von 5 Hz ein. Übernehmen Sie die Änderungen.
-
Um das LoRa-Funkgerät der Rover-Einheit für den Empfang der Korrekturen zu konfigurieren, kehren Sie zum Bildschirm Empfänger zurück und tippen Sie auf Eingabe von Korrekturdaten.
-
Wählen Sie LoRa. Stellen Sie die gleiche Frequenz und Luftdatenrate wie für die Basisstation ein. Tippen Sie auf Speichern.
Um sicherzustellen, dass die Korrekturen von der Basis zum Rover gelangen, können Sie beide Empfänger für einige Minuten an das Fenster stellen, um die Sicht zum Himmel zu gewährleisten. Öffnen Sie danach Emlid Flow, stellen Sie eine Verbindung zum Rover her und rufen Sie den Bildschirm Status auf. Blättern Sie nach unten zum Abschnitt Korrekturen und stellen Sie sicher, dass Ihr Rover Korrekturen empfängt.
Reach RS2/RS2+ Einheiten platzieren
Wenn Sie die Einstellungen an Basis und Rover vorgenommen haben, können Sie nach draußen gehen, um die Basis zu platzieren und den Einrichtungsprozess abzuschließen. Für die Arbeiten vor Ort benötigen Sie ein Stativ und einen Vermessungsstab. Gehen Sie wie folgt vor, um die Einheiten zu platzieren:
Vergewissern Sie sich vor dem Aufstellen der Basis, dass Sie sich in einem offenen Bereich mit freier Sicht zum Himmel befinden. Dies gewährleistet einen guten Signalempfang und eine ausreichende Anzahl an verfügbaren Satelliten.
-
Reach RS2/RS2+ Basis montieren.
-
Das Stativ exakt ausnivellieren.
-
Setzen Sie den Rover auf den Stab.
-
Bringen Sie die LoRa-Antennen an beiden Geräten an.
-
Schalten Sie die Empfänger ein.
Um mehr über die Platzierung zu erfahren, lesen Sie die Anleitung Basiseinrichtung.
Nachdem Sie die Basis auf das Stativ gesetzt haben, können Sie die Einrichtung abschließen:
In dieser Anleitung wird die Methode Mittelwert SINGLE zur Einrichtung der Basis verwendet. Weitere Informationen zu den Methoden der Basiseinrichtung finden Sie in der Anleitung Platzierung der Basis.
-
Stellen Sie eine Verbindung zur Basis her.
-
Tippen Sie auf dem Bildschirm Empfänger auf Basiseinstellungen.
-
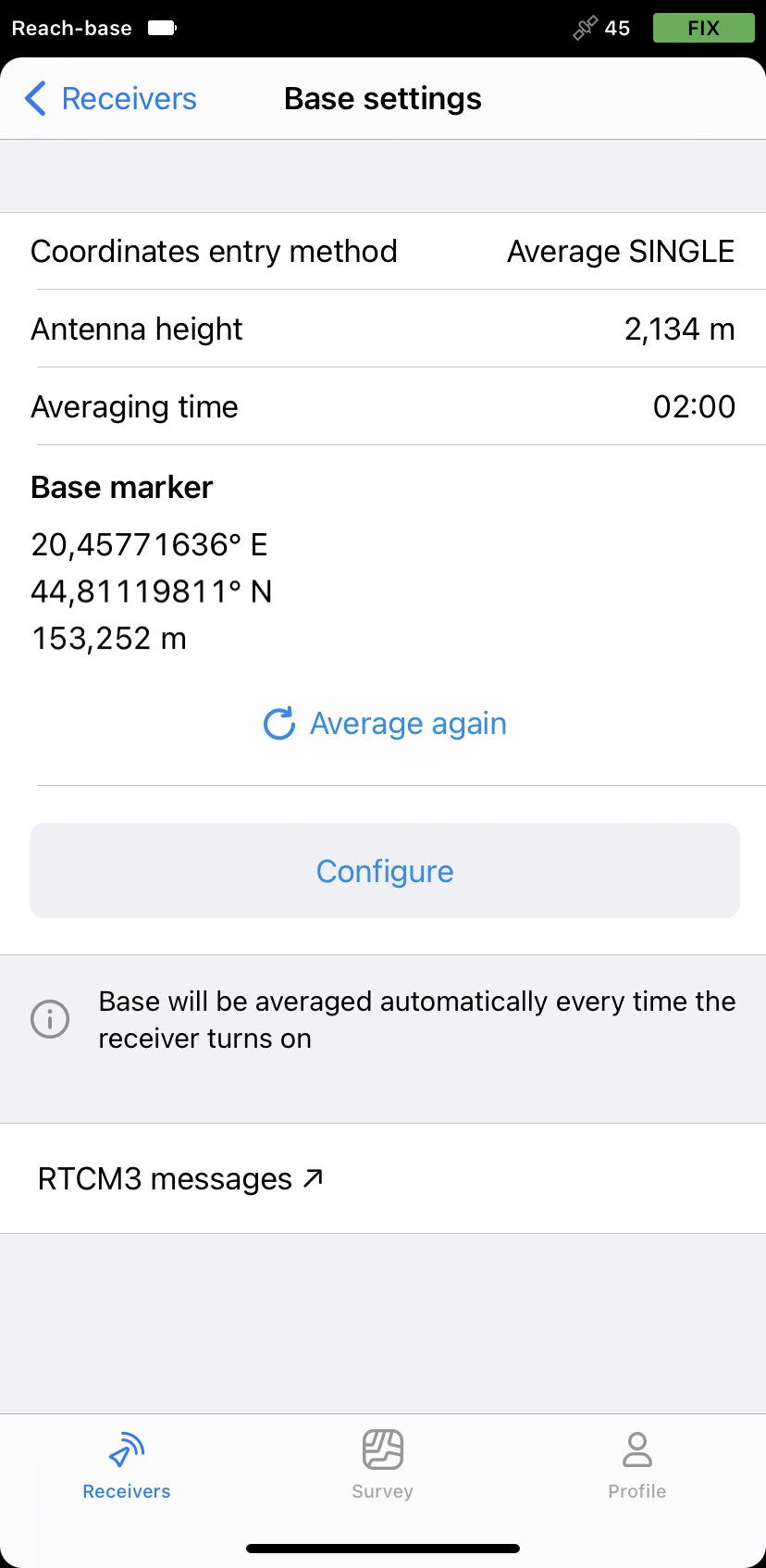
Um die Basiseinstellungen zu konfigurieren, tippen Sie auf die Schaltfläche Konfigurieren.
-
Wählen Sie Average SINGLE [Durchschnitt SINGLE] als Koordinateneingabeverfahren und legen Sie die Mittelungszeit fest. Tippen Sie auf Speichern.
cautionBewegen Sie die Basis nicht, während der Reach Daten erfasst.
noteDie Basisposition wird bei jedem Einschalten des Empfängers automatisch gemittelt.
Nach der Akkumulation der Daten sehen Sie die gemittelten Koordinaten im Abschnitt Basismarker. Jetzt ist Ihre Basis eingerichtet und sendet Korrekturen an den Rover.
Ergebnisse anzeigen
Wenn Sie Ihre RTK-Einrichtung über LoRa-Funk abgeschlossen haben, können Sie den aktuellen Lösungsstatus in der oberen rechten Ecke der Emlid Flow App sehen:
-
SINGLE bedeutet, dass der Rover eine Lösung gefunden hat, die sich auf seinen eigenen Empfänger stützt, und dass keine Basiskorrekturen angewendet werden. Für Reach-Empfänger empfehlen wir eine Aktualisierungsrate von 1 Hz auf der Basis und 5 Hz auf dem Rover.
-
FLOAT bedeutet, dass der Rover Korrekturen von der Basis erhält, aber nicht alle Mehrdeutigkeiten auflösen kann, und in diesem Fall liegt die Genauigkeit in der Regel im Submeterbereich.
-
FIX bedeutet, dass der Rover mit Hilfe von Korrekturen von der Basis die Mehrdeutigkeiten in seiner Positionsberechnung beseitigt und die Lösung mit Zentimetergenauigkeit erreicht hat.
Nach einer kurzen Zeitspanne erhält der Rover eine Fixed-Lösung (Zentimetergenauigkeit). Unter guten Bedingungen dauert es nur wenige Sekunden, um eine Fixed-Lösung (Zentimetergenauigkeit) zu erhalten. Unter schwierigen Bedingungen kann es etwas länger dauern. Sobald der Rover den FIX erhält, sind Sie bereit für die Vermessung.
Auf dem Bildschirm Status können Sie auch den aktuellen Lösungsstatus sowie Ihre Position in Echtzeit abrufen.
Wenn Sie lernen, wie Sie RTK über das LoRa-Funkgerät einrichten, können Sie auch nachlesen, wie Sie Ihren Reach mit dem Internet verbinden und mit dem Ntrip-Dienst arbeiten.