NOAA's Online Positioning User Service (OPUS)
This guide explains how to get the precise coordinates of a standalone receiver using the NOAA’s Online Positioning User Service (OPUS).
Overview
Online Positioning User Service (OPUS) is provided by the National Oceanic and Atmospheric Administration (NOAA). With OPUS, you may accurately determine the coordinates of a static point mostly on the territory of the US without real-time corrections or a base station nearby.
Check this map to see if the service is available in your region.
You can learn more about the NOAA’s OPUS on their official site.
How OPUS works
A standalone receiver finds its position by relying on the raw data obtained from satellites only. In this case, it can determine its position at the several-meter level. To improve the accuracy, the receiver can be used with a base station in the RTK setup. Since both receivers work in the same conditions, the base station sends corrections that eliminate the offsets and improve the accuracy.
OPUS allows achieving a centimeter-level accurate position of a point if you have only one receiver. When you upload your observation file, OPUS determines the date of a log recording and the receiver’s approximate position. Based on this information, OPUS retrieves Global Navigation Satellite System (GNSS) observation data sets distributed by the International GNSS Service (IGS) and then selects up to the best 9 reference stations from the IGS or Continuously Operating Reference Stations (CORS) network for a solution computing process.
Then these solutions are performed between each reference station and the receiver within the ITRF reference frame. The results are compared and averaged, and if the results from any reference station fail to pass the quality tests, then the next reference station is used in the computation. After the successful solution is obtained, OPUS software transforms the ITRF coordinates into the NAD83 datum, UTM, and State Plane Coordinates mapping projections. OPUS uses dual-frequency GPS data logs for solution computation and supports the Static mode only. The Static data is required to be recorded on the stationary receiver.
There are 2 ways you can process the data in OPUS:
- Static (for data that are 2 to 48 hours in duration)
- Rapid-Static (for data that are 15 minutes to 2 hours in duration)
The Static and Rapid-Static methods use different processing software and provide relatively similar horizontal accuracy. Rapid-Static processing has more strict requirements for data quality in comparison with the Static approach.
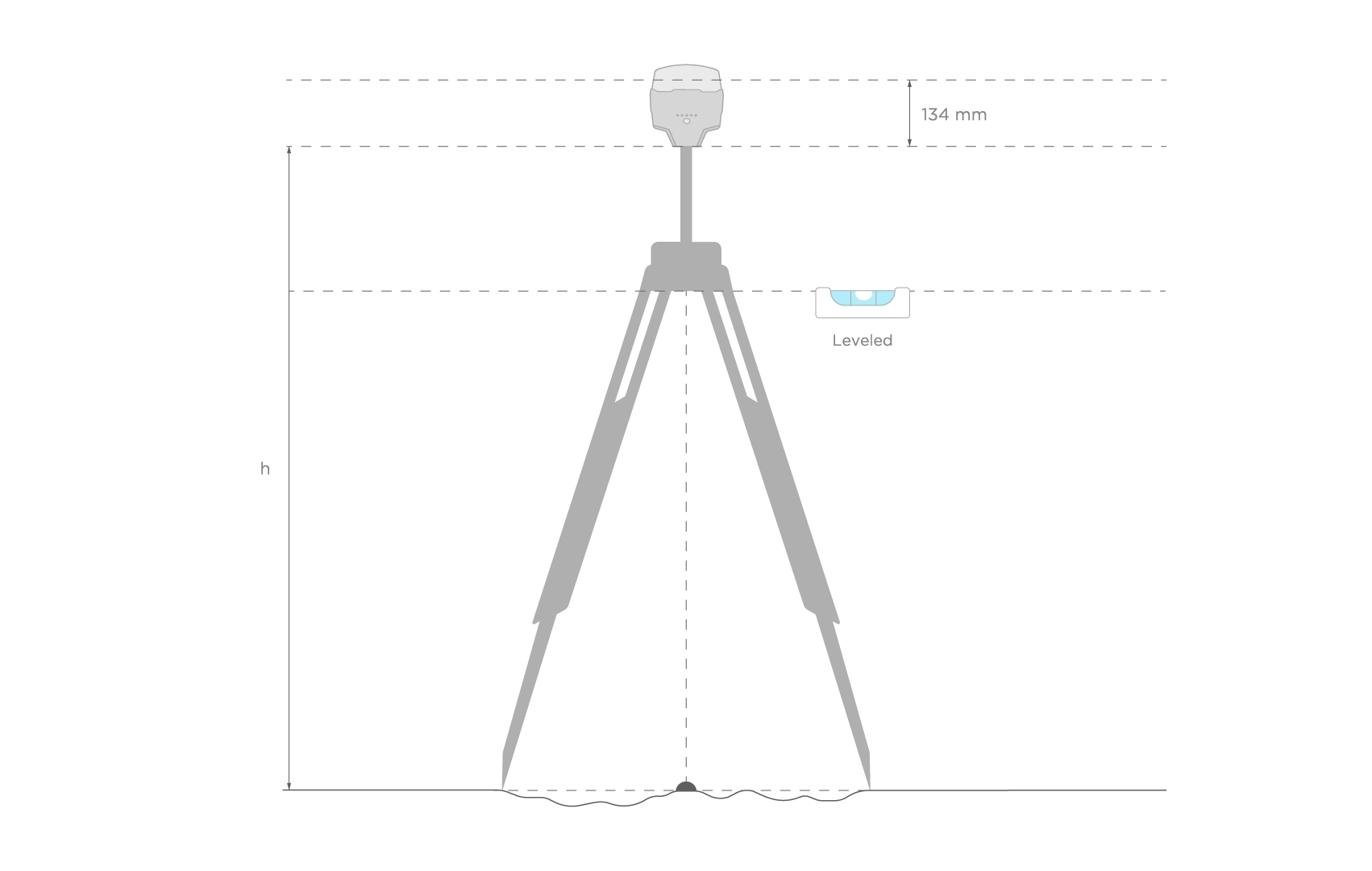
Placing Reach
Place your Reach precisely above the marked point on the tripod and level it. Learn more about placing Reach receiver in the Placing the base guide.
Recording RINEX logs on Reach
To record logs for OPUS, follow the steps below:
-
Open Emlid Flow and connect to your Reach.
-
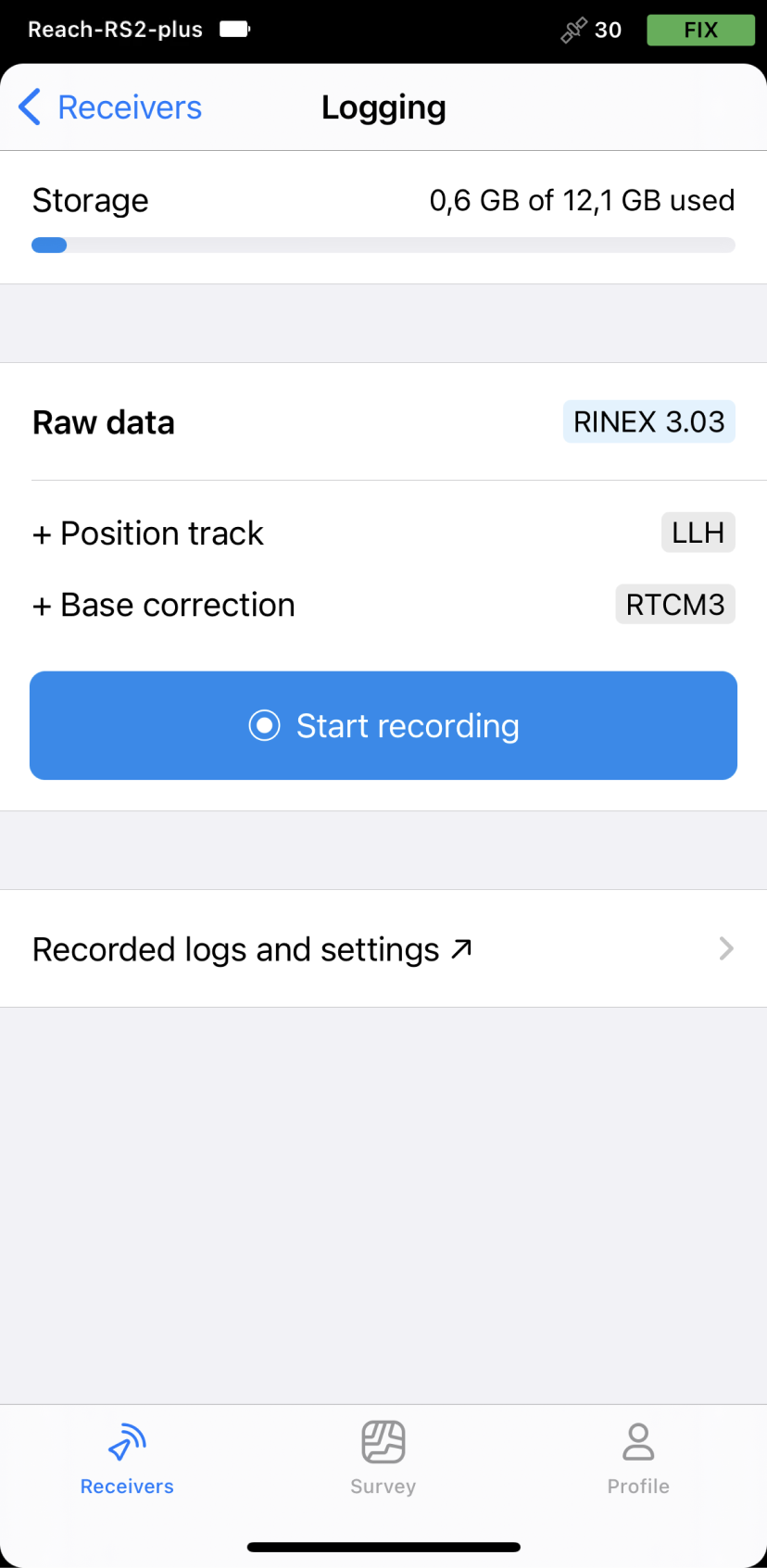
Go to the Logging screen.
-
Tap the Recorded logs and settings button.
-
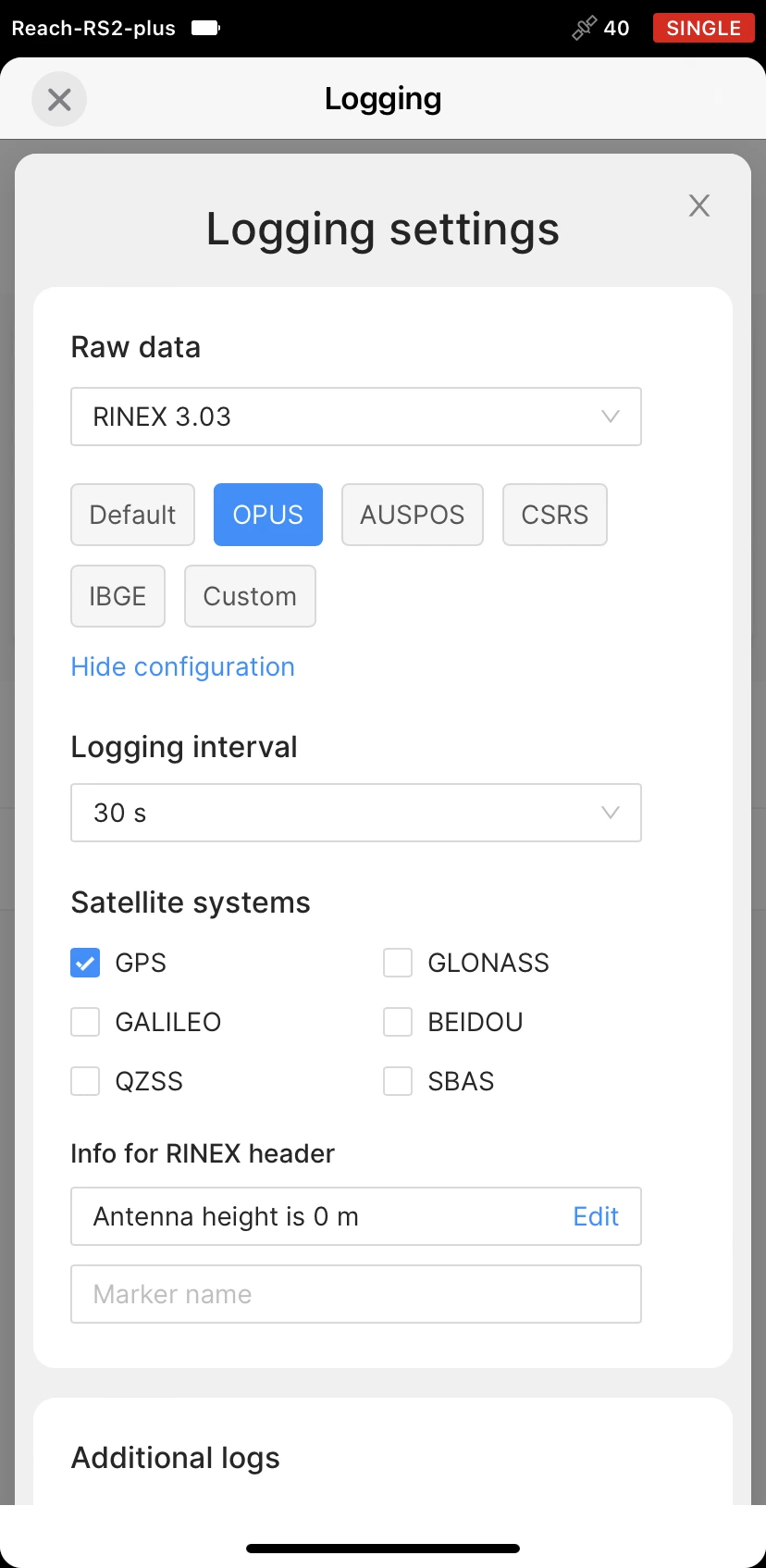
To configure logging, tap the Settings button.
-
Select the OPUS preset.
-
Choose the required RINEX format in the Raw data section.
noteIf you do not know which version of RINEX you need, we recommend using RINEX 3.03.
tipWhile recording in the RINEX format, you can log the UBX file as a backup. UBX file can be used to adjust RINEX file settings in the Converter tool in Emlid Studio. You can enable logging in the UBX format in the logging settings in Emlid Flow.
-
Tap Show configuration and enter the measured height to the bottom of the receiver in the corresponding field.
-
Fill in the point's name in the Marker name field.
-
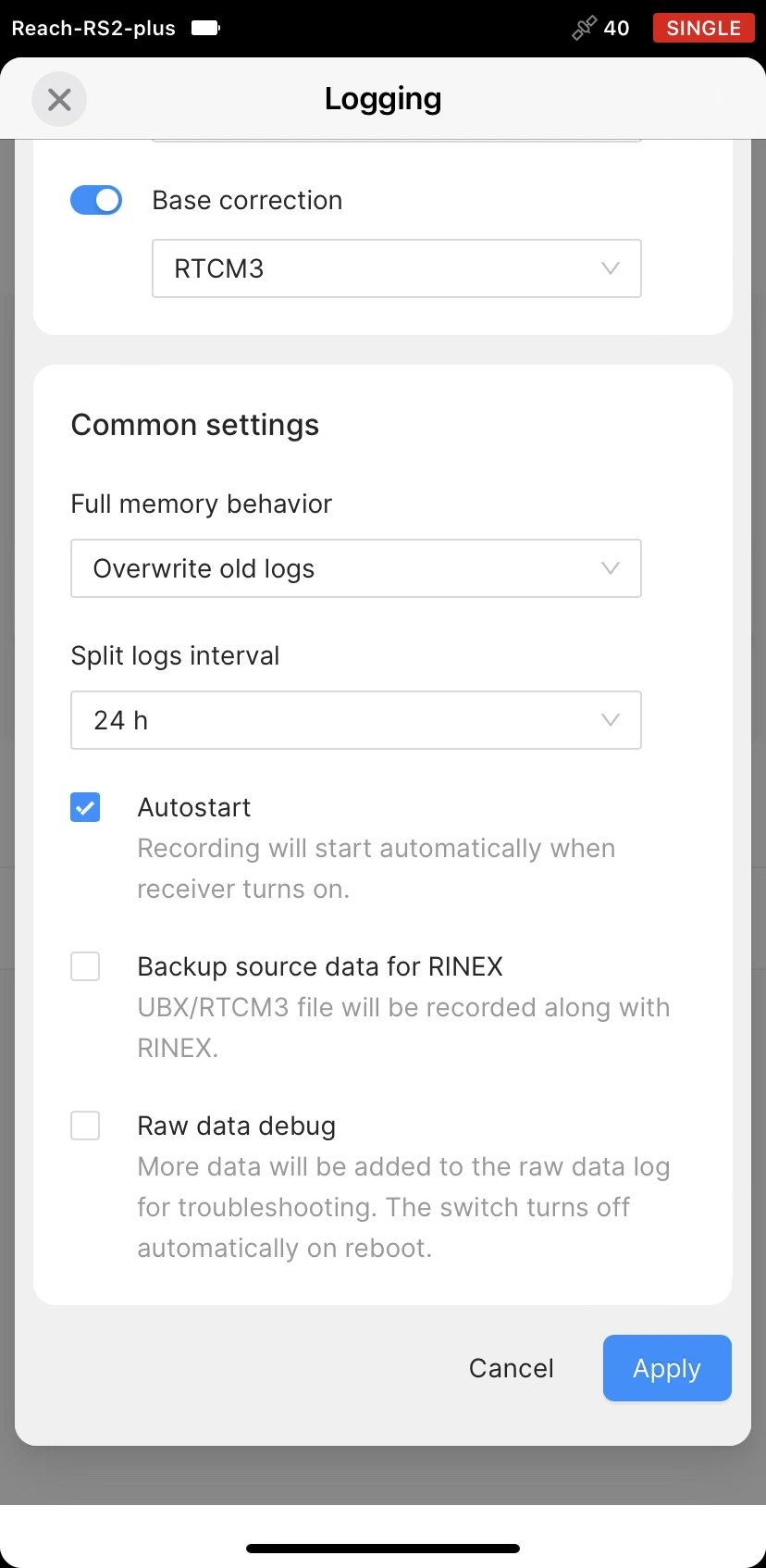
Tap Apply.
tipYou can start recording automatically when your receiver is turned on. Check the corresponding field on the Raw data settings screen.
-
Enable log recording by tapping the Start recording button. The red recording icon will appear in the status bar.
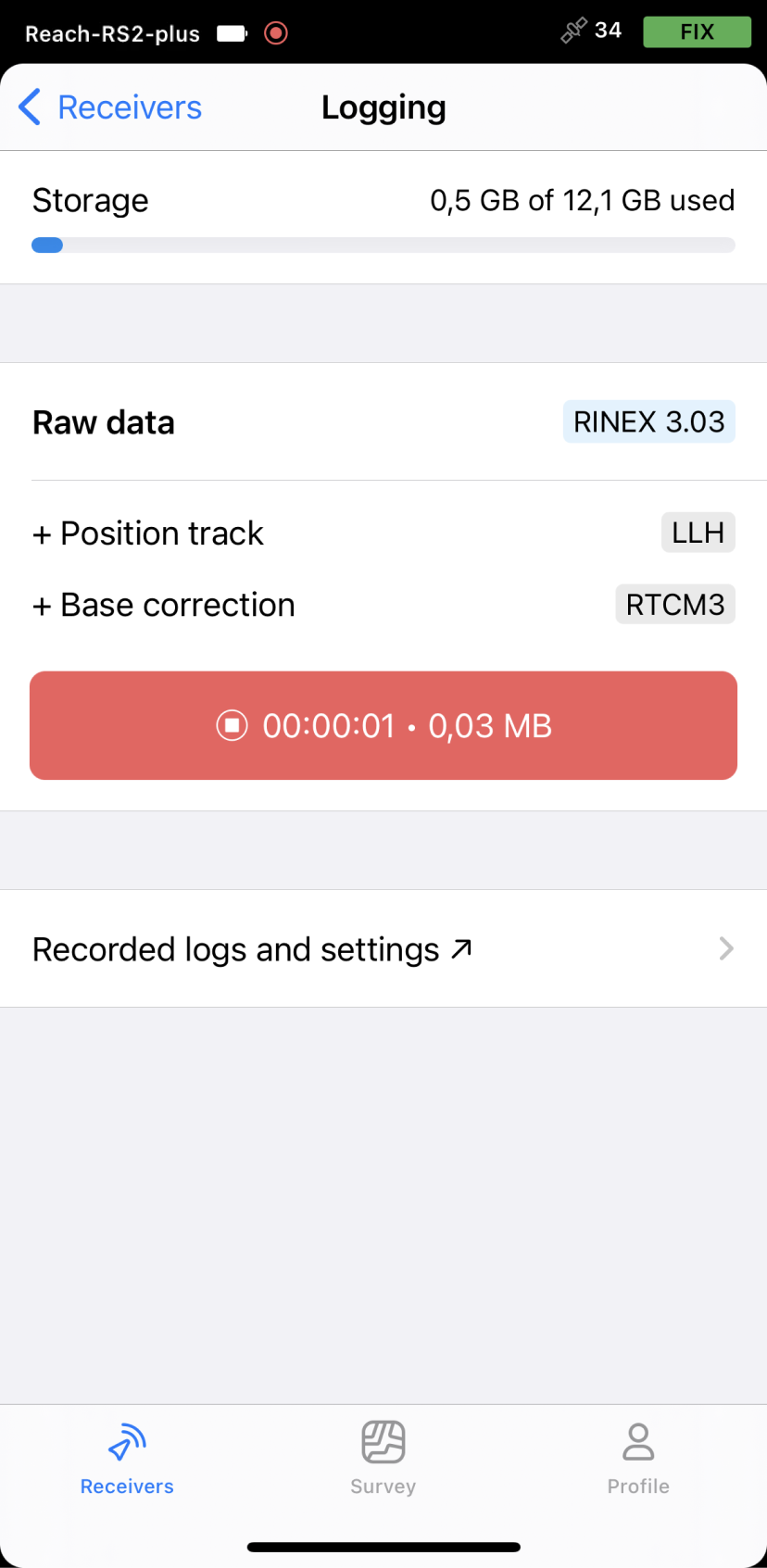 note
noteNOAA’s OPUS requires recording the data for at least 4 hours to get the best accuracy.
-
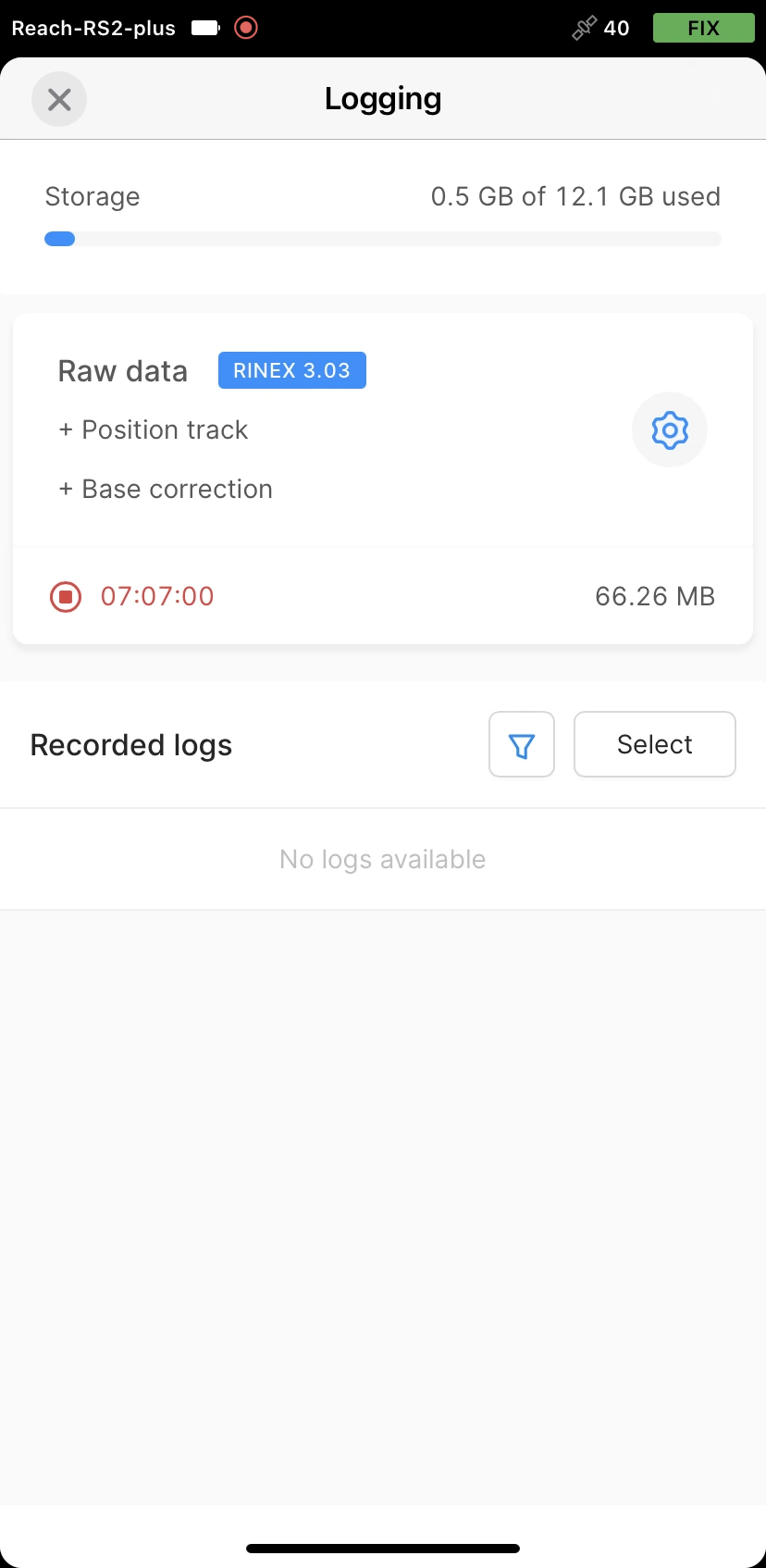
To finish recording logs, tap the End recording button.
Wait for data processing to finish.
You may log the data for up to 24 hours, depending on the accuracy required.
Once you finish the survey, don't forget to turn off raw data recording in the logging settings.
Downloading logs
After you finish raw data logging, you need to download RINEX data from Reach to your mobile device.
-
Go to the Recorded logs section at the bottom of the Logging screen.
noteYou can also find information on the logs size and recording date and time here.
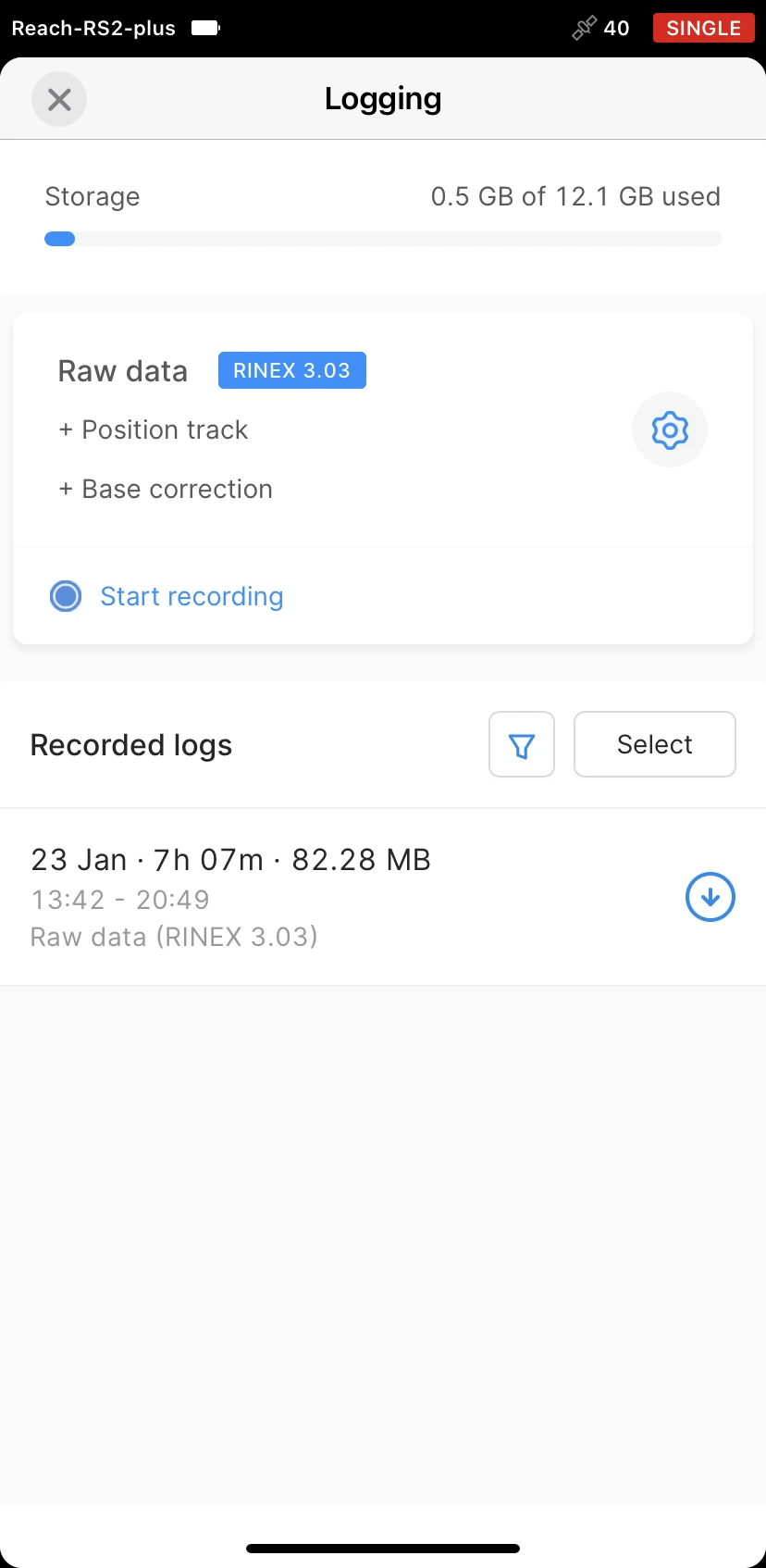
-
To export the file, tap the Download button.
-
Save your log depending on the device you use.
tipIf you do not need your logs anymore, you can delete them using the Select button.
Submitting data to NOAA's OPUS service
Once the logs are downloaded, export them to your PC in a preferred way and submit the data to NOAA’s OPUS for processing.
-
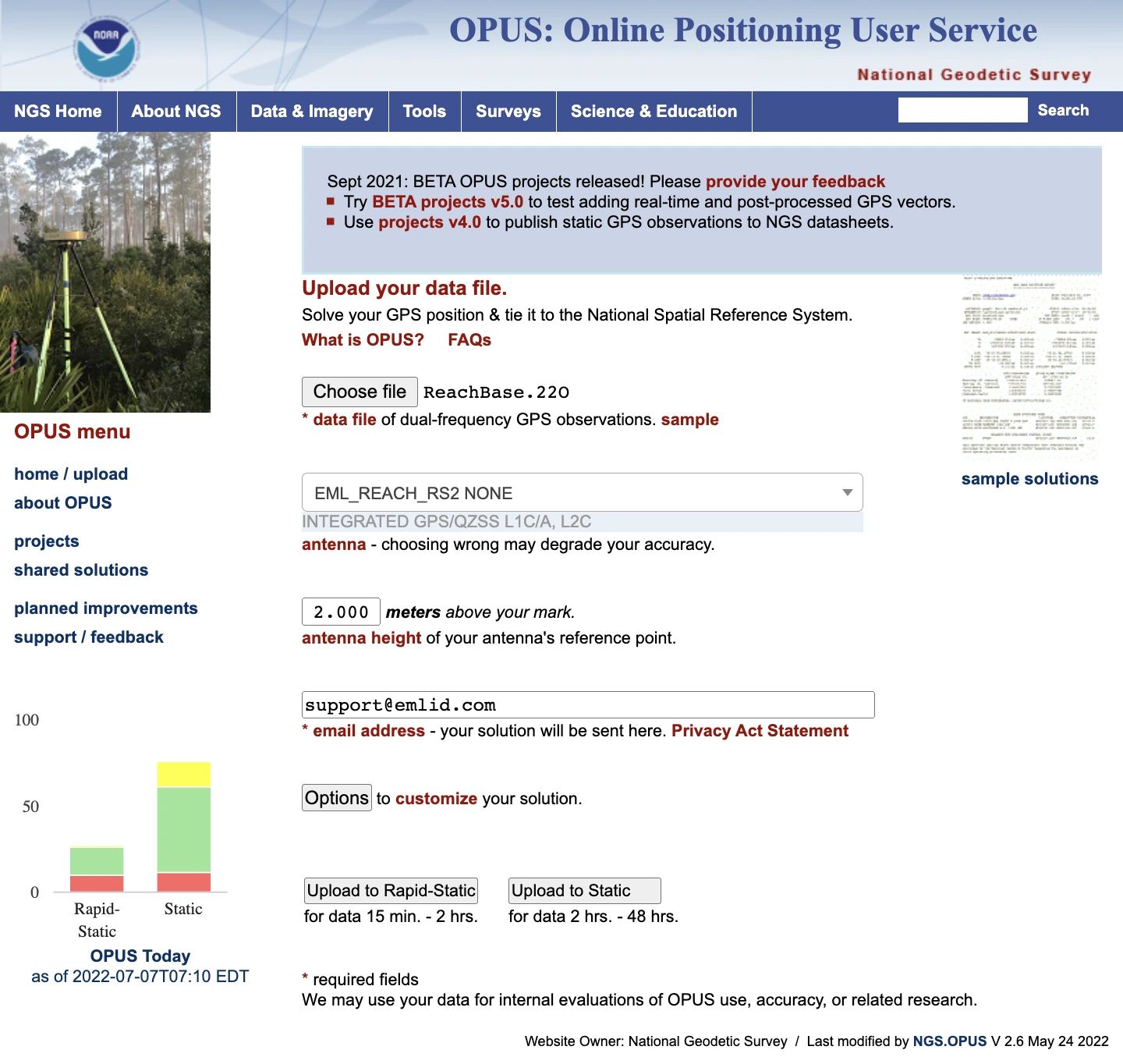
Go to the NOAA's OPUS site submission page.
-
Click on the Choose file button and browse for the observation file (.**O).
-
Choose EML_REACH_RS2 NONE in the Antenna field.
tipFor Reach RS2+, choose EML_REACH_RS2+ NONE.
-
Type a pole height in the Antenna Height field.
-
In the email address field, enter your email address to get the results.
-
Click on the Upload to Static button.
OPUS will send the file with the solution to your email address.
Assessing NOAA's OPUS results
In the solution report, you will get the name of the used reference frame, the XYZ and LLH coordinates of the point, and the estimated accuracy in meters. Additionally, you can check these fields: OBS USED, FIXED AMB, OVERALL RMS.
After you get the solution report, it might be useful to check how accurate the results are. The most accurate OPUS solutions meet the following conditions:
- Orbits used in the computation are precise or rapid.
- Over 90% of observations are used.
- Over 50% of ambiguities are fixed.
- Overall RMS is less than 3 cm.
Setting up obtained base coordinates in Emlid Flow
If you want to use the obtained coordinates as a base position, you can enter the base coordinates in Emlid Flow.
-
Open Emlid Flow and connect to the Reach you want to use as a base.
-
On the Receivers screen, tap Base settings.
-
Tap the Configure button.
-
Set the Coordinates entry method to Manual.
-
Specify the antenna height and enter the coordinates.
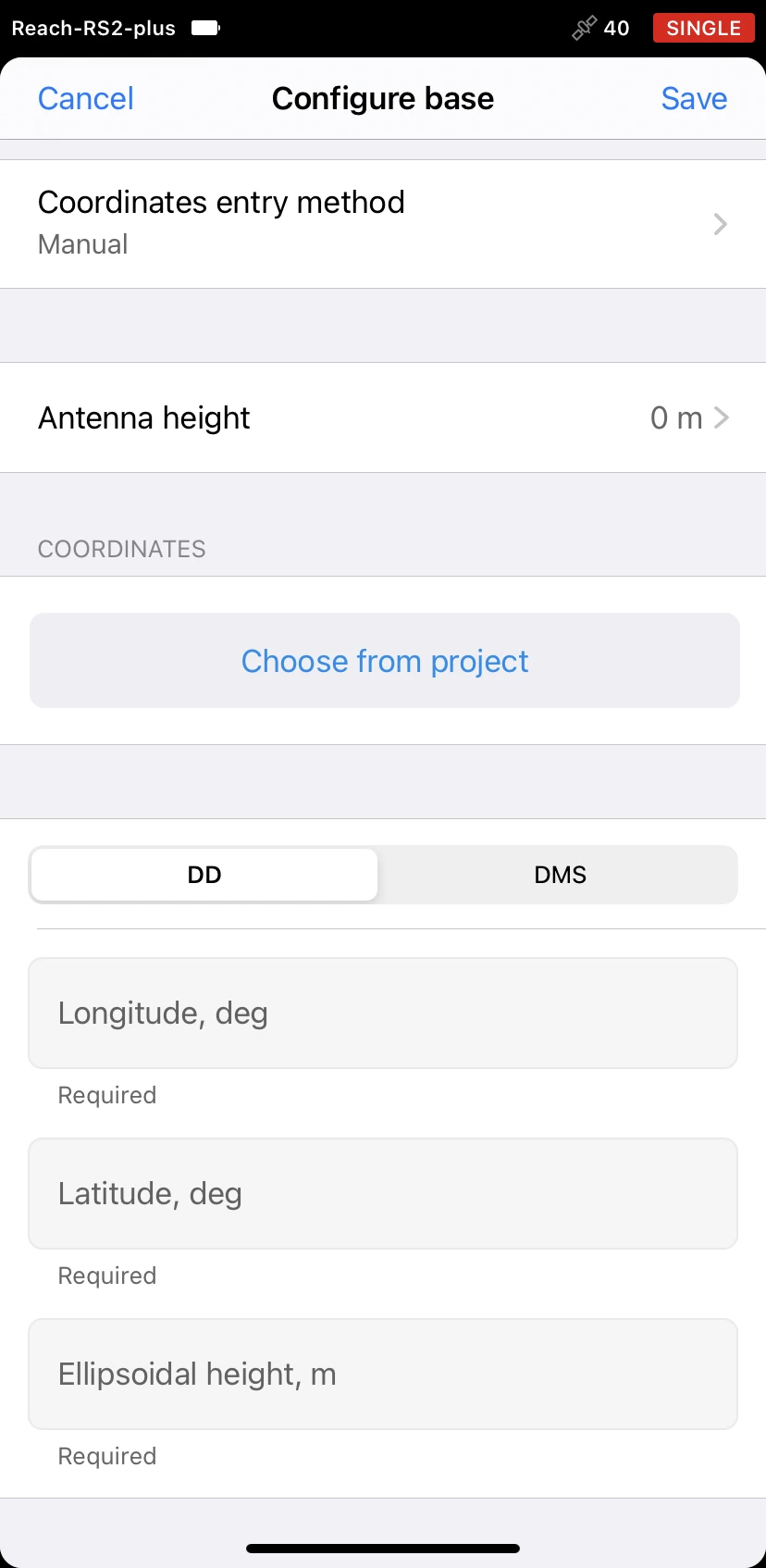
- Tap Save.
After setting up the base position, you can continue working in RTK or PPK.